

Введение
Здравствуйте, уважаемые хабровчане!
Последние два года моей работы в компании Synesis были тесно связаны с процессом создания и развития Synet — открытой библиотеки для запуска предварительно обученных сверточных нейронных сетей на CPU. В процессе этой работы мне пришлось столкнуться с рядом интересных моментов, которые касаются вопросов оптимизации алгоритмов прямого распространения сигнала в нейронных сетях. Как мне кажется, описание этих моментов было бы весьма интересным для читателей Хабрахабра. Чему я и хочу посвятить цикл своих статей. Продолжительность цикла будет зависеть от вашего интереса к данной теме ну и конечно же от моей способности побороть лень. Начать цикл хочется с описания самого
Ответы на вопросы
Прежде, чем начинать подробное описание фреймворка, постараюсь сразу ответить на ряд вопросов, которые наверняка возникнут у читателей. Опыт подсказывает, что лучше это сделать заранее, так как многие сразу начинают писать гневные комментарии, не дочитав до конца.
Первый вопрос, который обычно возникает в таких случаях: Да кто сейчас запускает сети на обычных процессорах, когда есть графические ускорители и тензорные (матричные) ускорители?
Отвечу, что да — обучение нейросетей действительно не целесообразно выполнять на CPU, но вот запускать уже готовые нейросети — вполне себе востребованная задача, особенно если сеть достаточно небольшого размера. Причины для этого могут быть разные, но основные:
- CPU более широко распространены. GPU есть далеко не на всех машинах, особенно это касается серверов.
- На небольших нейросетях выигрыш от использования GPU мал, а иногда полностью отсутствует.
- Эффективное задействование GPU для ускорения нейросетей, как правило, требует существенно более сложной структуры приложения.
Следующий возможный вопрос: A зачем использовать для запуска специализированное решение, когда есть Tensorflow, Caffe или MXNet?
Ответить на это можно следующее:
- Разнообразие фреймворков не всегда хорошо — так если в проекте есть несколько моделей, обученных разными фреймворками, то потом придется их всех встраивать в готовое решение, что очень неудобно.
- Классические фреймворки разрабатывались для обучения моделей на GPU — и в этом они безусловно хороши! Но для запуска обученных моделей на CPU их функционал избыточен и не оптимален.
- Подтверждением необходимости специализированного решения служит популярность OpenVINO — фреймворка от Интел, который выполняет ту же функцию.
Тут сразу логично возникает вопрос про изобретение велосипеда: Зачем использовать свою поделку, когда есть вполне профессиональное решение от признанного мирового лидера?
Отвечу так:
- На момент начала работ над Synet, OpenVINO был еще в зачаточном состоянии. И по правде говоря, если бы в то время OpenVINO был в его нынешнем состоянии, то я с высокой долей вероятности не стал бы ввязываться в свой собственный проект.
- Собственный фреймворк можно адаптировать под свои нужды. Так в моем случае, основным требованием была максимальная однопоточная производительность.
- Можно максимально быстро обеспечить поддержку новой функциональности, если она вдруг потребовалась (например, добавить новый слой и ли устранить ошибку с производительностью).
- Легкость встраивания в готовое решение.
- Функционирование библиотеки на платформах, отличных от x86/x86_64 — например на ARM.
Вероятно, у читателей возникнут и другие вопросы или возражения — но их я пока предугадать не могу и потому отвечу в комментариях к статье. А пока приступим к непосредственному описанию Synet.
Краткое описание Synet
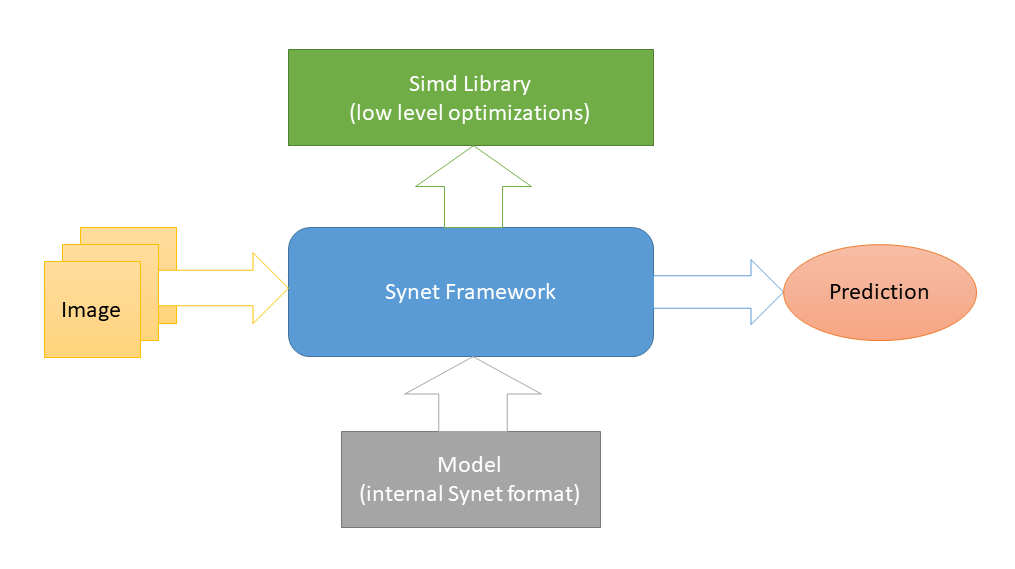
Synet написан на С++ и содержит только заголовочные файлы. Низкоуровневые платформозависимые оптимизации реализованы в Simd — другом open-source проекте, посвященном ускорению обработки изображений на CPU. И это единственная внешняя зависимость Synet (такая схема выбрана с целью облегчения интеграции библиотеки в сторонние проекты). Для запуска нейросетей используются модели собственного внутреннего формата.
Конвертация предварительно обученных моделей во внутренний формат осуществляется по двухшаговой схеме: 1) Сначала конвертируем модель в формат Inference Engine (благо
в OpenVINO есть для этого все необходимые инструменты). 2) Затем из этого промежуточного представления конвертируем непосредственно во внутренний формат Synet.

Модель Synet содержит два файла: 1) *.XML — файл с описанием структуры модели. 2) *.BIN — файл с обученными весами.

Пример использования Synet
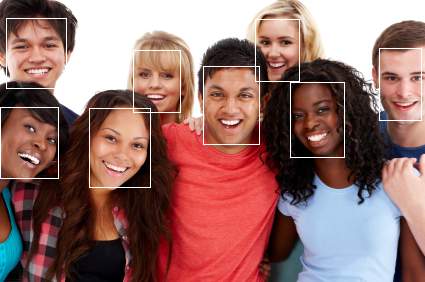
Ниже приведен пример, использования Synet для детектирования лиц. Оригинальная модель Inference Engine взята здесь.
#define SYNET_SIMD_LIBRARY_ENABLE
#include "Synet/Network.h"
#include "Synet/Converters/InferenceEngine.h"
#include "Simd/SimdDrawing.hpp"
typedef Synet::Network<float> Net;
typedef Synet::View View;
typedef Synet::Shape Shape;
typedef Synet::Region<float> Region;
typedef std::vector<Region> Regions;
int main(int argc, char* argv[])
{
Synet::ConvertInferenceEngineToSynet("ie_fd.xml", "ie_fd.bin",
true, "synet.xml", "synet.bin");
Net net;
net.Load("synet.xml", "synet.bin");
net.Reshape(256, 256, 1);
Shape shape = net.NchwShape();
View original;
original.Load("faces_0.ppm");
View resized(shape[3], shape[2], original.format);
Simd::Resize(original, resized, ::SimdResizeMethodArea);
net.SetInput(resized, 0.0f, 255.0f);
net.Forward();
Regions faces = net.GetRegions(original.width, original.height, 0.5f, 0.5f);
uint32_t white = 0xFFFFFFFF;
for (size_t i = 0; i < faces.size(); ++i)
{
const Region & face = faces[i];
ptrdiff_t l = ptrdiff_t(face.x - face.w / 2);
ptrdiff_t t = ptrdiff_t(face.y - face.h / 2);
ptrdiff_t r = ptrdiff_t(face.x + face.w / 2);
ptrdiff_t b = ptrdiff_t(face.y + face.h / 2);
Simd::DrawRectangle(original, l, t, r, b, white);
}
original.Save("annotated_faces_0.ppm");
return 0;
}
В результате работы примера должна появится картинка с аннотированными лицами:
Теперь давайте разберем пример по шагам:
- В начале идет преобразование модели из формата Inference Engine в Synet:
Synet::ConvertInferenceEngineToSynet("ie_fd.xml", "ie_fd.bin", true, "synet.xml", "synet.bin");
В реальности это шаг делается один раз, а потом везде используется уже сконвертированная модель. - Загрузка сконвертированной модели:
Net net; net.Load("synet.xml", "synet.bin"); - Необязятельный шаг по изменению размера входного изображения и батча (естественно, что модель должна поддерживать изменение входного размера):
net.Reshape(256, 256, 1); - Загрузка картинки и ее приведение в входному размеру модели:
View original; original.Load("faces_0.ppm"); View resized(net.NchwShape()[3], net.NchwShape()[2], original.format); Simd::Resize(original, resized, ::SimdResizeMethodArea); - Загрузка изображения в модель:
net.SetInput(resized, 0.0f, 255.0f); - Запуск прямого распространения сигнала в сети:
net.Forward(); - Получение набора регионов с найденными лицами:
Regions faces = net.GetRegions(original.width, original.height, 0.5f, 0.5f);
Сравнение производительности
Наверное было бы не совсем корректно сравнивать Synet с классическими фреймворками для машинного обучения, например Inference Engine на ряде тестов их обходит в разы.
Потому ниже приведен пример сравнения однопоточной производительности Inference Engine (продукта схожей функциональности) и Synet на выборке из набора открытых моделей:
| Test | Description | i7-6700 3.4GHz 4c/8t FMA/AVX-2 | i9-7900X 3.3GHz 10c/20t AVX-512 |
|---|---|---|---|
| test_000 | Vehicle attributes recognition (2.4 MB) | 1.520 / 1.597 ms (-5%) | 0.772 / 0.690 ms (+12%) |
| test_001 | Age gender recognition (8.2 MB) | 1.659 / 1.418 ms (+17%) | 0.988 / 0.804 ms (+23%) |
| test_002 | Face detection (4.0 MB) | 34.26 / 43.17 ms (-21%) | 26.72 / 24.57 ms (+9%) |
| test_003f | Face detection (2.2 MB) | 12.63 / 14.87 ms (-15%) | 8.680 / 9.326 ms (-7%) |
| test_004 | Licence plate recognition (4.6 MB) | 4.350 / 4.871 ms (-11%) | 2.838 / 2.432 ms (+17%) |
| test_005 | Licence plate recognition (0.7 MB) | 0.339 / 0.260 ms (+30%) | 0.200 / 0.142 ms (+41%) |
| test_006 | Face reidentification (4.2 MB) | 11.82 / 9.052 ms (+31%) | 8.200 / 4.559 ms (+80%) |
| test_007 | Person reidentification (3.1 MB) | 3.567 / 3.402 ms (+5%) | 2.471 / 1.679 ms (+47%) |
| Average | +2% | +25% |
Как видно из таблицы, на данных тестах на машине с поддержкой AVX2 (i7-6700) производительность Synet в целом соответствует производительности Inference Engine (хотя и сильно варьируется от модели к модели). На машине с поддержкой AVX-512 (i9-7900X) производительность Synet в среднем на 25% превышает таковую у Inference Engine.
Все измерения проводились тестовым приложением, которое есть в Synet. Так что при желании, читатели смогут воспроизвести тесты у себя:
git clone -b master --recurse-submodules -v https://github.com/ermig1979/Synet.git synet
cd synet
./build.sh inference_engine
./test.sh
Достоинства и недостатки
Начну с плюсов:
- Проект небольшой по размеру, легко внедряется в сторонние проекты.
- Показывает высокую однопоточную производительность.
- Работает на мобильных процессорах (поддерживает ARM-NEON).
Ну и минусы, куда же без них:
- Нет поддержки GPU и других специальных ускорителей.
- Плохое распараллеливание одной задачи на многоядерных CPU.
- Нет поддержки INT8 (квантизации весов).
Заключение
В настоящее время Synet используется в рамках проекта Kipod — облачной платформы для видеоаналитики. Возможно у него есть и другие пользователи, но это не точно :). В дальнейшем, по мере развития проекта, в него хотелось бы добавить следующие вещи:
- Поддержку новых моделей, слоев, алгоритмов.
- Поддержкy целочисленных вычислений в формате INT8 (квантизированных весов).
- Поддержкy вычислений на GPU.
- Конвертация из формата ONNX.
Этот список далеко не полный, и дополнять его хотелось бы с учетом мнения сообщества — потому жду ваших отзывов! Чтобы инструмент был полезным не только нашей компании, но и широкому кругу пользователей. Также автор не отказался бы от помощи сообщества в процессе разработки.
При описании Synet, которое я сделал в этой статье, я намеренно не углублялся в детали ее внутренней реализации — под капотом много вкусных алгоритмов, но детали их реализации хотелось бы раскрыть в следующих статьях цикла.

ZlodeiBaal
Возникает пара логичных вопросов:
1) А почему только с OpenVINO сравнение. а с OpenCV нет? Он то как раз умеет на армах инферить. Хотя не помню что там с поддержкой именно на мобильниках.
2) На i7 i9 вы сравнивали производительность с OpenVINO? Мне кажется у вас достаточно медленно.
3) Почему не поддерживаете какой-нибудь ONNX который сейчас по сути стандарт для передачи моделей между разными фреймворками?
4) Я правильно понимаю, что у вас только поддержка базовой архитуктуры? Для того же RPi NEON-совместимое ядро не будет поддерживаться? Так же как GPU-на чипе для Intel?
ErmIg Автор
1) Наболее быстрая реализация OpenCV на процессорах Интел реализовано как раз на OpenVINO (Inference Engine там под капотом). Потому зачем тащить OpenCV, если можно сравнить напрямую.
2) По умолчанию OpenVINO включает распараллеливание на все ядра, как и другие фреймворки. Может поэтому у вас сложилось такое впечатление. Если я не прав — поправьте.
3) У нас на проекте используется два вдижка (Inference Engine и Synet) — взависимости от того что быстрее, то и используется. Потому с целью облегчения своей работы, я ограничился конвертацией из OpenVINO — благо в этот формат так и так надо перегонять.
4) Raspberry Pi поддерживается. Впрочем как и любой ARM с поддержкой NEON.
ZlodeiBaal
1) Но вы ставите в минус OpenVINO именно невозможность работать на ARM'ах. Что OpenCV неплохо реализует.
2) OpenVINO ещё оптимизирует свёртки и их последовательность для оптимального использования памяти. Так что интересно именно сравнение производительности.
3) Чем больше форматов, тем больше сеть теряет при перегонке. Например: чтобы выгрузить PyTorch -> TensorRT надо сделать 2 конвертации. Чтобы выгрузить TensorFlow в Google TPU там где-то 3 нужно было. И каждая конвертация режет список возможных слоёв/соединений, и.т.д.
Чем ближе вы к графу исходной сети — тем лучше. Чем дальше вы — тем сложнее вас использовать. Использование ONNX даёт вам всего один хоп до исходной сети. При этом ONNX очень много что поддерживает.
4) Мне кажется что там сопроцессор. Вы поддерживаете именно его? Или разбиваете на процессор + сопроцессор? Просто, например, Caffe2 считал только на сопроцессоре в RPi 3 (была нулевая загрузка проца, по времени получалось раза в полтора быстрее чем ту же сетку инферить на проце простой версией Caffe с его 100% загрузкой). OpenCV, если я правильно помню, инферит на обоих устройствах. Но я не понимаю как они задачи согласуют/раскладывают.
ErmIg Автор
1) Возможно я не прав.
2) Synet тоже оптимизирует свёртки и их последовательность для оптимального использования памяти. Благодаря чему и достигается преимущество в производительности.
3) Согласен. Добавлю в цели :).
4) Под сопроцессором вы встроенный GPU имеете в виду?
ZlodeiBaal
2) Собственно я и говорю — что было бы интересно посмотреть сравнение. Оптимизировать свёртки можно разными путями. Может у вас всё сильно лучше вышло.
4) Там есть какой-то FPU (VFP), если я правильно понимаю. И максимальную производительность вроде как вытаскивают с него. Я просто не очень глубоко копал, но заметил что некоторые фреймворки основной процессор почти не грузуили. Читал описание что они вычисления на математическом сопроцессоре гоняют.
ErmIg Автор
2) Скорость кода может катастрофически (до 10 раз) меняться в зависимости от того, влазят расчетные данные в процессорный уеш или нет. Потому любой быстрый алгоритм должен разбивать/сливать исходные данные такми образом, что бы кеш использовался максимально эффективно. В Synet и Inference Engine немного разный подход, но основные принципы совпадают.
4) Не знаю, VFP — вроде как аналог x87 и считается устаревшим в ARMv7 и ARMv8. Везде рекомендуют вместо него использовать NEON. Единственное его преимущество — поддержка FP64. Но почитаю про него по подробнее.