
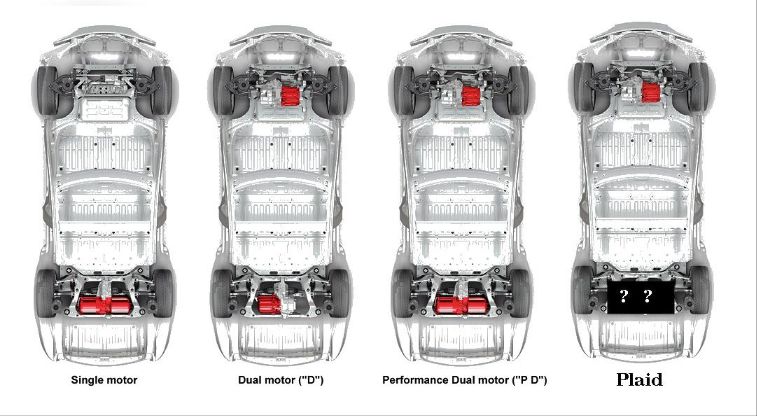
Илон Маск пообещал предоставить 3-х моторную версию комплектации для Model S, X, Roadster и Cybertruck, но пока не сказал как это будет выглядеть. В теории есть 2 варианта возможного устройства, их и предлагаю рассмотреть.
Вариант №1

Первый вариант это схема где два электромотора сзади не имеют механической связи друг с другом. Дифференциал в заднем мосту отсутствует, а его роль выполняют электромоторы, меняя обороты на приводных колесах программно.
Такая схема расположения электромоторов позволяет реализовать функцию управления вектором тяги колес. Это означает что кроме перераспределения оборотов колес в повороте, электромоторы могут «направлять» вектор тяги электромобиля по нужной траектории путем ускорения отдельных колес.
Разработкой электропривода с «векторизацией» колес сейчас занимаются многие компании, а вот примеров трехмоторных электромобилей с задней «векторной» осью из двух двигателей мало.
Один из самых подходящих на роль примера Теслы… является Magna E1.

Прототип Е1 представленный в 2017 году был создан для демонстрации возможностей раздельного привода задних колес.
Этот электромобиль обычная Tesla S, но с необычным приводом.
Компания Magna установила 3 двигателя в машину, каждый из которых выдает 188 л. с. что конечно меньше Tesla Model S P100D, и поначалу может показаться ухудшением электромобиля. Действительно мощность меньше, что сказывается на прямых участках разгона, но благодаря «векторизации» задних колес машина стала устойчивей в прохождении поворотов, что позволяет ехать с минимальным снижением динамики.
В 2018 году Magna повторно представила этот же электромобиль дав название системе привода etelligentDrive. Целью создания этой системы была в предложении ее для установки небольшим авто-производителям желающим снизить расходы на разработку собственного электромобиля.
Компания Magna специализируется на создании компонентов и различных систем для авто-производителей и не планирует выпускать собственный электромобиль.
Главный и наверно самый интересный вопрос для этого привода это цена.
Тут пока можно ориентироваться только на пример 3-х моторного «векторного» электропривода для ралли кросса Е.

Так фирма STARD планирует поставлять комплекты этого привода по цене 194 000 € для ралли 2020.
Электропривод, как и в случае с Magna будет состоять из 3 моторов, где на передней оси один мотор, а сзади два. Отличие в мощности и внутреннем устройстве комплекта.
Мощность — 450 кВт (1100 Нм), а внутри сзади 2 электродвигателя, 2 инвертора, 2 планетарных редуктора и полный пакет охлаждения для системы Entrire в одном компактном корпусе из литого алюминия.
Производительность гоночного автомобиля с электроприводом STARD будет впечатляющей, если учесть то, что с точки зрения крутящего момента силовой агрегат способен набрать максимум от 0 до 90% примерно за 32 миллисекунды, а электродвигатели выдают до 14 000 об / мин.
Кроме Magna и STARD 3 мотора тестировали в BMW и Audi.
В BMW на базе 5 серии был создан прототип для тестирования комплекта из трех моторов Power BEV. Для питания электропривода в машину была установлена аккумуляторная батарея емкостью 45 кВт?ч.

Силовая установка Power BEV имеет максимальную мощность — 530 кВт (720 л.с.) и около 1150 Н?м, что позволяет автомобилю разгоняться до 100 км/ч за 2,8 секунды.

Audi для тестов построила трехмоторный концепт PB18 e-tron, и в этом году планирует выпустить эту машину ограниченной серией.
При описании отдельного привода «один мотор — одно колесо» редко когда можно встретить упоминание о недостатках этой схемы.
В Porsche Engineering при тестах 4-х моторного прототипа есть упоминание нескольких недостатков.
- выяснилось, что большое преимущество электродвигателей — их быстрое время реакции, иногда может приводить к нежелательным побочным эффектам (вибрации).
- может случиться так, что отдельные электродвигатели не смогут передавать доступную мощность, и надо будет снижать этот показатель у второго двигателя в паре.
Возможно именно поэтому сейчас получила развитие схема с 3-мя моторами, которая уменьшает влияние этих двух недостатков вдвое… но также уменьшает и потенциал преимуществ векторного привода.
Вариант №2
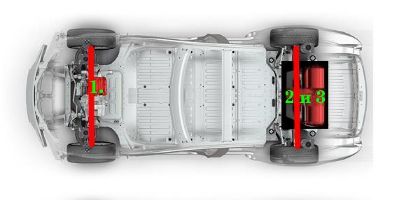
Второй вариант это схема где два электромотора сзади работают через дифференциал в разных режимах (последовательно или параллельно).
Первый пример такого привода — проект ESKAM ( Elektrische SKalierbare Achsantriebs Module).

Проект ESKAM (электрический масштабируемый мост, Elektrische SKalierbare AchsantriebsModule) в Германии, финансируется Федеральным министерством образования и науки Германии (BMBF), и совместно реализуется 11 партнерами ( Ebm Erich Buchele Maschinenbau GmbH; Технический университет Дюссельдорфа, электротехника и электрические машины; Groschopp AG; Hirschvogel Automotive Group GmbH; Университет прикладных наук Аален, Общее машиностроение; Металлургический завод Wilhelm Funke GmbH & Co. KG; REFU Elektronik GmbH; Salzgitter Hydroforming GmbH & Co. KG; Штутгартский университет, Институт силовой электроники и электроприводов (ILEA); Wilhelm Vogel GmbH Antriebstechnik; и Фраунгоферовский институт станков и технологий формовки (IWU).
Цель проекта — ограничить вес привода до 100 кг. Для этого необходимо соединить несколько высокоскоростных электродвигателей с соответствующими редукторами и объединить их в общем корпусе — другими словами, уменьшить размер привода с помощью так называемых высокоскоростных электронных машин. Для решения это задачи использовали электродвигатели без редкоземельных металлов.

Примеры масштабирования электропривода ESKAM. Чтобы сохранить производственные затраты на низком уровне, используемые технологии должны одинаково подходить для малых и больших серий.
Первый прототип создан в 2016 году.
Конструктивно решение выглядит как симбиоз двух электромоторов с КПП и силовой электроникой в общем корпусе. Это повышает энергоэффективность и производительность, а также снижает вес и стоимость привода. Использование быстро вращающихся электродвигателей в сочетании с подходящими трансмиссиями также помогает уменьшить вес и объем системы. Корпус для интеграции всего привода выполнен в облегченной литой версии из магния, которая отвечает особым требованиям в отношении охлаждения или тепловой нагрузки компонентов привода. Полный приводной модуль для передней и / или задней оси состоит из двух электродвигателей с масляным охлаждением, с шестернями и электроникой. С выходной мощностью 2 x 35 кВт он обеспечивает максимальный крутящий момент до 2 x 55 Нм при скорости 6700 об / мин. Благодаря редукторам с передаточным отношением i: = 19 каждое приводное колесо может достигать более 1000 Нм. «Но также возможно использовать приводной модуль в небольших сериях новых транспортных средств, например, в городских автомобилях или, как и планировалось, в городских транспортных средствах средней грузоподъемности, которые могут доставлять до 1,5 тонны товаров с доставкой.
Номинальные скорости используемых двигателей составляют от 10 000 до 20 000 оборотов в минуту. Задушенный электроникой, этот двигатель достигает максимальной мощности 35 кВт при скорости до 20000 об / мин. Поскольку максимальная мощность для цикла движения в верхнем диапазоне скоростей (> 17 000 об / мин) больше не требуется полностью, эта конструкция электроники допускает, что максимальная мощность может быть уменьшена с 35 кВт до 29 кВт. С модифицированными компонентами в электронике максимальная мощность может не только поддерживаться постоянной, но может быть увеличена даже до 54 кВт. Модуль оси обладает многочисленными преимуществами, такими как высокая плотность мощности и очень высокий крутящий момент. Для водителей это означает очень быстрое ускорение. В то время как скорость большинства электродвигателей составляет приблизительно от 10 000 до 15 000 об / мин, двигатель ESKAM (от Groschopp) развивает скорость 20 000 об / мин с максимальным крутящим моментом 45 Н · м (33 фунт-фута) и мощностью 32 кВт (43 л.с.).
Для экономии энергии Groschopp планирует увеличить объем используемого активного железа с 150 до 250 мм. «Это соответствует увеличению производительности до 50 процентов», — подчеркивает Вольфганг Пфлуг. «Однако для передачи этой дополнительной мощности на колесо необходимы усиления в коробке передач и электронике».
В электроприводе ESKAM используются высокоскоростные синхронные двигатели с электрическим возбуждением и электронной коммутацией с короткозамкнутым ротором (EEEK).
Производственные затраты на конечный приводной модуль будут от 1000 до 2000 евро, что значительно ниже текущей средней цены, превышающей 5000 евро. С компонентами, обычными на рынке, бюджет затрат остается настолько маленьким, что затраты на производство всей оси для серийного производства из 10000 единиц будут значительно меньше 3000 евро.
Следующий потенциальный производитель «сдвоенных» электроприводов — Gravitron.
Этой компанией разработано 3 прототипа подобного привода.

Есть и любительские электрические «двухмоторники».
Как и в первом варианте кроме проектов и прототипов в 2020 году появятся и реальные примеры серийных электромобилей с 2-мя моторами на одной оси.
Первый спортивный электромобиль от Aston Martin — Rapide E, имеет долгую историю разработки и в первоначальных планах должен был обладать раздельными электромоторами с «векторизацией момента», но по многим причинам этого не случилось.

Вместо отдельных электроприводов в Rapide E установили два синхронных электромотора совокупной отдачей 612 л.с. и 950 Нм на задней оси, которые работают через дифференциал последовательно.
Это переменное включение электромоторов может показаться странным, если не вспомнить назначение двух моторов на Тесле, где передний небольшой мотор помогает экономить энергию за счет максимальной нагруженности в городском режиме, а более мощный задний используется на максимум при необходимости ускорения и движения на более высоких скоростях.Дальше аналогии с Теслой не заканчиваются.
Так разработчики гордятся эластичностью электропривода: с 50 до 70 миль в час (80—113 км/ч) электромобиль ускоряется всего за полторы секунды.
Как тут не вспомнить Маска с его обещанием супер ускорения благодаря Plaid?
А еще в Aston Martin обещают что Rapide E сможет промчать один круг Нюрбургринга в боевом режиме, сохранив производительность электро-системы, что немного напоминает главную проблему спортивной Tesla на той же трассе по причине перегрева электропривода.
Есть правда и основное отличие — максимальный тираж Rapide E будет составлять всего 155 машин, и это во многом объясняется нежеланием компании развивать данный проект дальше, так как имея главный недостаток в виде базы-основы для электромобиля кузов бензинового автомобиля сложно оптимизировать расположение основных агрегатов. Проще создать полноценную электромобильную платформу для этой цели.
А вот для Теслы скорее всего проблемы с установкой третьего двигателя при использовании аналога привода Rapide E нет, и поэтому возникает закономерный вопрос — «будет ли Маск рисковать с раздельным приводом колес по варианту №1, если он дает лучшую управляемость, а не разгон (при том что в Тесле как раз для лучшей управляемости разрабатывают пакет SpaceX?).
Или все же возьмет вариант №2 для лучшего ускорения, решения проблемы перегрева электромотора, и повышения надежности привода (отказ одного двигателя — не отказ всего привода). И тут конечно важно вспомнить что первый кто применил привод с векторизацией — Nissan, так и не построил ни одного электромобиля с таким приводом на продажу, а вместо этого в 2020 году показал систему электропривода с векторизацией без раздельного привода ( e-4ORCE).
P.S. — У автомобилей с ДВС так же были варианты привода колес двигателями по первому и второму варианту.



lingvo
В принципе самый простой вариант — два мотора сзади раздельно на каждое колесо. Это по идее самый экономный вариант, который за счет отказа от дифференциала позволит уменьшить и массу и стоимость. А моторы сейчас достаточно простые и по стоимости один большой мотор эквивалентен 2-м маленьким. Электронный диф на двух моторах обещает быть очень прикольной и полезной штукой, вплоть до того, что два колеса могут вращаться в разных направлениях.
Но с другой стороны, так как уже известно, что КПП электромобилю все-таки не помешает, может быть интересно сделать два двигателя параллельно, работающих на разных передаточных числах и, возможно, разных принципах. Т.е. один из двигателей был бы эффективен на низких скоростях, а другой — на высоких.
ПС, но в общем да, согласен, задерживаются обсуждаемые новости от Маска, поговорить неочем :-)
clawham
так уже есть это — спереди мотор на неодимах а сзади асинхронник. неодимы экономичны на крейсерской а асинхронник толкает с места когда эффективность не очень и важно — нужна грубая сила.
Чесно говоря не вижу смысла в двух моторах — ненужное усложнение конструкции и программного обеспечения. лучше просто бОльший мотор и диф + стабилизация курса подтормаживанием борта.
lingvo
С точки зрения эффективности я тоже не вижу смысла в трех моторах. Двух на разных осях вполне достаточно.
GeorgKDeft Автор
Фото с патента «3-х моторного электромотора» для электромобилей.
Смысл в поддержании 100% К.П.Д. электродвигателя за счет перехода к следующему электромотору на оборотах падения К.П.Д. предыдущего.
Nagg
Что не придумаешь лишь бы не делать стойкую к высокому моменту коробку передач)))
remzalp
это дополнительный вес, дополнительная точка смазки, дополнительный источник шума
Nagg
А дополнительные двигатели не являются источником шума и дополнительным источником охлаждения? Речь не идет о полноценной 8 ступенчатой коробке с двумя сцеплениями, достаточно хотя бы 2ух передач, а то и трех — тесла теряет эффективность уже после 60-80 км/ч, это хорошо видно на графике момента.
clawham
Данная задумка лишена смысла вообще т.к. наиболее эффективными двигателями на сегодняшний день являются BLDC двигатели на магнитах. а они сопротивляются вращению когда их не питают и самое главное — они не дадут раскручивать себя выше определенных оборотов которыми и является точка наивысшего КПД. а если расчитать так чтоб все они имели нормальную скорость по напряжению — у них и точка кпд будет около этих напряжений. это только если чисто физически отключать провода от инвертора но тогда появляется реальное механическое контактное устройство переключения одного контроллера к конкретному мотору. любое электромеханическое устройство комутации на 500-100 ампер это износ искрение и ненадежность. электронную комутацию сделать невозможно. потому что если BLDC мотор расчитаный на 400 вольт 40 кмч (первая ступень) раскрутить до 160 кмч(допустим третья ступень) то на его обмотках выработается напряжение в 400*(160/40) = 1600 вольт. таких ключей на 500-1000 ампер и 1600 вольт(а по хорошему надо полторакратный запас по току и напряжению иметь) с приемлемым кпд нет! на тех что есть — падает вольта 2,5-3. при токе 1000 ампер и трех ключах это только на ключах 3-5 киловатт в тепло. при сумарной полезной мощности в 20-30 квт это уже даже не 90% кпд а до мотора мы ещё не добрались.
Приемлемый кпд имел бы механический многосекционный переключатель но у него ресурс. как видите на текущем уровне развития силовых ключей эта концепция впринципе нереализуема.
откуда я это знаю и почему так уверен? а я так делал на своем электровеле — мотор можно соединить в звезду и тогда скорость будет 40 кмч но с низов хорошая тяга а можно соединить в треугольник и тогда при том же контроллере и батарее максималка уже 70 но с низов тяги нет вообще. попытки даже на таком малом напряжении комутировать обмотки электронными ключами фетами(которые намного лучше игбт на высокие напряжения) приводили к тому что эти феты грелись больше чем сам мотор и сильно падал кпд(повышался расход на одной и той же скорости одной и той же дороге в одних и тех же условиях — я тратил на 20% больше энергии а значит уезжал на своем аккуме на 20% меньше). ну и надежность. стоит переключиться на долю секунды не вовремя и удар по защитным диодам приводил к вылету силовых ключей в контроллере хотя они были расчитаны уже на 360 ампер а работали на 50-ти!
GeorgKDeft Автор
т.е. если не BLDC двигатели то задумка все же сработает? Наверно не просто так сейчас тестируют двигатели без редкоземельных магнитов да?)

По поводу тестов велосипедов вспомнился проект с двумя моторами от hycore
Этот проект 2012 года (250 Вт ~ 500 Вт). Передача момента шла через планетарную передачу.
clawham
асинхронник всегда заведомо хуже по кпд. он лучше по массогаббариту когда надо 800 киловатт в минимальный размер впихнуть и пох на кпд. потому тесла его и пихала — места мало батарея огромна и надо мощща для вауэффекта.
потом в версиях лонг ренж — на переднюю ось поставили более слабый(а там и не надо) но намного более экономичный BLDC и вуаля — вместо 300+ кмч на той же скорости в тех же условиях с той же батареей теперь можно проехать 500+ км. звучит конечно странно но это факт.
Асинхронник всегда будет сложнее в управлении, менее rgliysv и более мощным при прочих равных.
Все под задачу так сказать.
А велики двумоторные и даже с двумя передачами давно существуют. у великов знаетели есть замечательная особенность — ввиду малой их массы им не нужен ни задний ход ни рекуперация а потому выключение двигателей можно производить механически обгонной муфтой. механика какбы тоже не самое надежное решение тем более эти муфты и являются всегда слабым звеном и на своём веле я допустим запарился их менять.
Я же говорил о патенте где три мотора на одном валу. механически конечно можно сделать отключение каждого из моторов — ну чтото типа многодисковых сцеплений в масляной ванне… но… блин… мы ж от механики пытаемся уйти а тут надо будут муфты на полный крутящий момент каждого из моторов + маслонасос для управления приводом этих муфт + клапана для перераспределения давления масла + маслобак + маслофильтр… уже помоему нагородили много лишнего не так ли?
GeorgKDeft Автор
Ирония в том что так уже пытаются делать… например масштабируемый привод от Ricardo.
Если кратко там есть — масло которое охлаждает и смазывает редуктор, электродвигатель и инвертор и "противоположное приведение в действие двух сцеплений коробки передач с двойным сцеплением для ограничения нагрузки на подшипники вала и обеспечения меньших подшипников и меньших потерь на трение" (цитата из статьи).
clawham
а где я сказал что так сделать невозможно? ВОЗМОЖНО! и даже будет эффективность и смысл в этом… но только не ценовой а электромобиль сможет стать массовым только когда сравняется по цене с коптилкой а с этими механизмами — никогда не сравняется даже рядом не встанет
GeorgKDeft Автор
Не думаю что цена будет больше при массовом производстве… скорее самым дорогим вариантом могут стать на будущее электромобили с сверхпроводящими электромоторами.

Сейчас такие в авиации тестируют, и есть два варианта — гелиево-водородное охлаждение и охлаждение жидким азотом ( этот вариант лучше не только по температурным показателям, но и по потенциалу защиты батареи от перегрева и после аварии как я уже ранее писал).
clawham
вдумайтесь что вы написали! сверхпроводащий ротор будет дешевле куска меди…
мдее… фантазии… вы знаете сколько стоит заново намагнитить катушку Магнито-резонансного томографа? Знаете сколько стоит 1 килограм жидкого гелия произвести? сколько стоят баки для его хранения. какие они прочные и насколько надежные.
И да… обратимся на картинку — там сверхпроводимые только магниты ротора. медная обмотка в любом случае не сверхпроводна! да ещё и в том виде как нарисовано — невозможна. плюсом идет очень мягкая характеристика — потеря роста момента при росте фазного тока т.к. воздушный зазор между статором и ротором обязан быть большим для теплоизоляции. и что это даже в теории может нам дать?
Даже на неодимах медь и является ограничителем — она плавится раньше чем электромагнит из неё пересилит поле даже простых дешевых неодимов из китая! и даже уже на текущий момент мотор на 3000 об/мин мотается 3-мя витками провода. тоесть сверхмагнит в роторе сможет уменьшить это число втрое чтоб при том же напряжении получить те же 3000 обмин надо будет один виток намотать. следовательно медь станет в три раза толще и типа мовысится мощность в три раза — чисто теоретически прикольно. вот только не стоит забывать что каждый милиметр зазорав 1.41 раза уменьшает максимальный момент при заданном токе. Воздух знаетели очень плохой магнитопровод. как и все теплоизоляторы. так что да — в теории чисто с дикими поступлениями жидкого гелия в ротор можно раза в два увеличить мощность оставшить при этом на кпд BLDC в районе 92-95% — дальше там уже расти некуда. больше 100% кпд не поднимеш а эти крохи 8-5% что сейчас теряются всеравно будут теряться на меди, статорном железе и воздушном зазоре.
Кроме того посмотрите ютуб. литиевая баночка 18650 горящая продолжает прекрасно гореть на дне банки с жидким азотом. нет никаких способов остановить тепловой разгон литиевых аккумов кроме как дождаться пока она прогорит полностью и выводить газы куда-то где они делов не наделают.
GeorgKDeft Автор
Я такого не писал… наоборот сверхпроводящий будет самым дорогим, но и самым эффективным.
Да цена это конечно печальный факт, но когда вы покупаете мега-суперкар цена вас волнует не так сильно, как характеристики. Учитывая что такие машины стоят иногда как самолет то не вижу в этом проблемы. Тем более гелий в авиа-электро-моторе там охлаждает только статор (ссылка на статью тут).
Речь не идет об тушении загоревшихся элементов, а о деактивации соседних чтоб реакция не распространялась.
Bedal
дифф и тормоза — совершенно лишние, не нужные, пустые затраты при электроприводе. Тормоза ещё ладно, для экстренного торможения и фиксации нуля, а уж диффы, коробки уйдут туда же, куда ушли оглобли и шорки.
clawham
как видите не ушли. моторы эффективны и легки только если развивают 12-20 тыщ оборотов на валу и потому полюбому редуктор им будет нужен.
И вот тут мы приходим к вопросу что эффективнее и экономичнее — 3 шестерни 6 подшипников шириной х или 6 шестерен и 12 подшипников шириной 0.75х. кроме того в первом случае корпус один и крепление к раме 4 точки а во втором случае два корпуса и 8 точек крепления.
Кроме всего прочего не забываем про инвертор — вес инвертора на 400 киловатт или на 700 разницы особой иметь не будет а вот два инвертора по 300 будут явно и тяжелее и больше места занимать.
Теперь по надежности. Я думаю ни у кого не возникает сомнений что два двигателя это более надежно чем 3 двигателя и тем более больше надежно чем 4 двигателя. совершенно не важно сколько у вас двигателей — если их больше двух — отказ одного всеравно не приводит к потере возможности передвигаться а вот точек отказа появляется больше.
Плюс не забываем что даже сам Маск признавал что два двигателя на одной оси требуют других протоколов и програмных приемов так как быстродействия кана тут уже не хватает — появляются вибрации и рассинхрон в некоторых переходных режимах.
Bedal
для производства, за редчайшим исключением, эффективнее одна штука. Лишний корпус, лишние шестерни — всегда лишние деньги.
Уже давно достигнутая надёжность электромоторов лишает Ваши рассуждения смысла.
О чём я и твержу — нарабатывать алгоритмы.
Было бы удивительно, если бы шина, сделанная ради зажигания поворотников, поспевала за управлением тягой.
clawham
было бы странным что электричество созданное для освещения дорог вместо газоых ламп двигали автомобили…
никогда многомоторность не станет обыденностью.
В лучшем случае два мотора на перед и зад т.к. в одном моторе невозможно сочетать высокий кпд во всех режимах работы.
По поводу надежности ну это вы перегнули. у теслы довольно нередкие явления пробоя изоляции обмоток, как и у лифов и прочих.
Кроме того не одним двигателем жив привод — там как бы шестерни подшипники смазка стояночные тормоза охлаждение и самое главное — инвертор! да они очень сложны и тоже иногда сдыхают и удваивать или учетверять вероятность этого события себе дороже.
Алгоритмы нельзя наработать — в каждом конкретном случае они будут свои. своя математика датчики и скорость реакции контроллеров не есть константа.
Именно что в одном корпусе два редуктора не разместить. будут или два независимых или два но с общей одной стенкой. Любой из этих вариантов в любом случае дороже одного или двух моторов на разных осях. кроме того место не последнюю роль играет- хоть электромотор меньше но всеравно обьема ему нужно. и его редуктору тоже. Контроллер опять же у той же теслы занимает такой же обьем как и двигатель.
Езда в одну педаль… хаха… расскажете мне об этом когда там реально будет одна педаль а пока мех тормоза всегда будут на месте со своей системой абс. логично использовать наработки и по ESP так как работая через торможение колес её алгоритмы то уже реально отработаны и константны для почти любых автомобилей сравнимой массы длины и ширины. потому это глупо изобретать велосипед когда уже есть проверенный временем надежный понятный дешевый и отработанный вариант. Да и колодки с дисками надо таки притирать ато все рекуперацией тормозят — диски ржавеют и в критический момент эта ржавчина помешает эффективному торможению.я уж не говорю что эффективная рекуперация до 5-10 кмч возможна — дальше только механика.
striver
Мде, рассуждения на уровне… лошадь проверенное ТС века, что уж ваш там какой-то автомобиль, масла, рули, шины…
clawham
но это логика по поводу каншины у Bedal ;)
Просто есть решения прижившиеся уже 30 лет как и есть сомнительные попытки выйти за рамки привычного. электромобиль при всей своей непривычности очень быстро пошел в массы только когда по поведению пробегу и внешнему виду стал походить на привычные авто на двс. а некоторые особенности привода дали конкурентное преимущество которое и перебило основную проблему долгая зарядка.
да и от колодочных тормозов с гидроприводом вы как хотите вертитесь но никак не отвертитесь.а раз есть они то нужна к ним и АБС а раз так то на колесах уже есть датчики скорости, исполняющий механизм и осталось только особым образом этим рулить. вот вам и ESP. а пытаться заменить копеечный проц-надстройку над ABS вторым мотором и вторым редуктором и вторым контроллером ради какой-то призрачной выгоды ведь ESP делает всё то же самое. ну это как третья рука между ног… вроде как прикольно но куда её применять? вот и остался у нас копчик вместо этой руки. так и тут — может в каких-то уникальных машинах это и будет актуально. массовому сегменту важна цена и простота конструкции.
lingvo
Почему? Колодочные тормоза на автомобилях с ДВС в немалой мере обязаны тому, что двигателем тормозить эффективно невозможно. Вот они и развились до того уровня, который имеем сейчас. Причем на некоторой технике — многотоннажных фурах или карьерных самосвалах они совсем не так хорошо применимы, как хотелось бы — приходится добавлять всякие ретардеры и рекуперацию.
Но с электромотором ситуация поменялась — он может создавать приличный и контролируемый тормозной момент практически не хуже механических тормозов, да еще и без превращения кинетической энергии в тепло.
Это открывает кучу возможностей вплоть до отказа от механических/гидравлических тормозов вообще через несколько лет, когда их надежность и стандарты позволят сертифицировать такие системы. Также для ESP/ABS это лучше — в автомобилях с ДВС эти системы могут только контролировать тормозной момент индивидуально на каждом колесе, а с электромотором на каждом колесе можно еще и контролировать тяговый момент — что скорей всего тоже повысит безопасность.
То есть есть все шансы в будущем получить четыре мотора, но полное остутствие гидравлики, уменьшение неподрессоренных масс и вообще простую механику.
clawham
1) никогда ни одна ассоциация в здравом уме не разрешит автомобиль где обесточивание контроллера приводит к полной потере возможности ускоряться поворачивать и тормозить!
2) Никогда ни один здравомыслящий человек не захочет подарить свою жизнь сверхсложному электронному устройству, функционирование которого зависит от состояния высоковольтной батареи предохранителей реле контакторов и прочего прочего прочего.
3) вы переоцениваете возможности рекуперации. да тормозить оно может хорошо но когда есть куда рекуперировать. в том же лифе например первые 10 км после полной зарядки рекуперация по сути отсутствует — некуда девать энергию когда батка полна. Дальше хуже — до полной остановки например у емня на электровеле контролер умеет тормозить но цена такого торможения адский нагрев мотора ведь для поддержания тока торможения приходится в противоток давать вращение(по сути включать задний ход) это фундаментальный прикол всех электромоторов. никогда ничего другого изобретено не будет.
4) как вы и сказали — мех тормоза достигли апогея своей эффективности надежности и веса а потому — нет никакого смысла в них сомневаться и уж тем более отказываться.
Давайте тогда уж от фар откажемся от поворотников. от колес в конце концов. зачем эти архаизмы?
lingvo
Ну так в чем проблема сделать два, три, четыре контроллера с отдельными независимыми питаниями и схемами голосования.? Думаете это достаточно сложно на сегодняшний день? Я — нет.
И никогда не говори никогда. Были разные ассоциации, а прогресс есть прогресс.
Ну мы же на самолетах летаем? Там тоже сложная электронная система управления fly-by-wire. И которая при потере питания превратится в тыкву, так как механическое управление там практически отсутствует.
Проблема поставить конденсаторы, куда сливать энергию торможения, а потом от них медленно заряжать батарею?
Много чего достигало своего апогея надежности и эффективности. Например механические часы. Но многие сейчас их используют?
Будут робомобили — откажемся от фар и поворотников, так как в отличии от человеков, роботы на них не особенно расчитывают.
clawham
ну давайте по пунктам — высоковольтная батарея всегда будет иметь в своем составе контактор который отключает её от внешних соединений, всегда так же будет иметь предохранитель.и всегда там будет бмс которая в случае выхода за пределы параметра любой ячейки — вынужэдена будет отрубить батарею от внешнего мира дабы избежать пожара. произойти это может в любой момент и никто никогда не сделает такую батарею неотключаемой — высокое напряжение и высоковольтные провода в вибрирующей и деформирующейся желеной оболочке принципа не поменяют никогда — буть то батарея или конденсаторы или ионисторы или маховик — всегда будут системы защиты и предохранения а они могут в любой момент усилие торможения свести до нуля.
Почему ионисторы не годятся — ну… потому что нет ионисторов размером в 3-6 литров чтоб могли хранить 400 вольт 10 амперчасов. Если на то пошло вы вообще не в теме как работают конденсаторы и в каком виде они энергию запасают. Для сведения 100 фарадный конденсатор это всего 0.5 амперчаса. будете соединять конденсаторы последовательно для поднятия напряжения — ёмкость делится на столько на сколько последовательных кондеров вы подключили! тоесть набрать 200 ионисторами 100 фарадными 2.3 вольта вы получите сумарную батарею в 0.5 фарад 400 вольт. Понимаете проблему? конденсаторы-ионисторы тут не годятся никаким боком.
в 2 3 4 контролерах и системе контроля их есть одна проблема — ЦЕНА! стоимость 4 тормозных дисков, супортов, магистралей, ГТЦ и электроусилителя — 500-1000 уе. стоимость одного контроллера тесла 2500 уе. и никогда эта стоимость не опустится до уровня 500-1000 уе т.к. там что уж могли — то и упростили донельзя. ну не выходят они дешевыми никак.
на том же боинге 737 есть прямой тросиковый привод каждого критически важного элемента механизации крыла и стабилизаторов. всегда в любой ситуации можно отключить сервоприводы fly-by-wire или вообще руками их удержать так как все они расчитаны так чтоб один пилот мог одной рукой удержать любой привод любой плоскости. аналогично — приводы топливных и масляных кранов к двигателям — прямые механические. конечно все продублировано сервоприводами но в кабину прям рукоятки механические выведены и в случае выхода их строя всей электроники — можно лететь тупо на мускульной тяге.
по поводу что ABS что ESP — там есть механический предохранитель — зауженые сечения клапанов — если они не будут работать импульсно как в нормальных условиях — слив давления будет превышать возможности поступления новой порцыы масла высокого давления и усилие отбивания педали падает до уровня который человек в случае экстренного торможения сможет пересилить. аналогично и ESP — она воздействует на те же клапана ABS и работает по тем же принципам. Так что неудачный пример ни один ни второй — всё не то.
Подушки да стреляли но от этого руль не отваливается и глаза не вытекают — прекрасно можно дальше ехать немного уши закладывает. говорю как человек которому пальнула в лицо чертова подушка от камешка в бампер.
про кондеры уже говорил — проблем нет — никогда таких кондеров в доступном размере не будет deotcndjdfnm — фундаментальное принципиальное ограничение.
мех часы работают везде повсюду. Даже ваши электронные часы фитнестрекеры и так далее никак не смогли уйти от механического генератора колебаний первого порядка на 32768 герц. именно механического — кусочек кварца подвешен на тончайших золотых проволочках и видрирует изгибаясь механически. так что в каком-то роде механические часы никуда не делись — просто стали меньше и быстрее.
фраза «будут робомобили» мне нравится. особенно в плане того что на дорогах даже сейчас есть 30-тилетние автомобили + старинных ретромобилей запретить не смогут никогда а потому и фары и поворотники и зеркала и противотуманки будут всегда пока это будут машины на дорогах куда может попасть человек с тротуара ибо те же габаритные огни нужны не самому транспортному средству с его водителем а другим людям вокруг этого тарнспортного средства так же как и сигнал. Это я уже не говорю о юридической составляющей вроде чья будет ответственность если робомобиль задавит женщину например или проедет по платной дороге — кто платить будет? владелец скажет я не хотел чтоб он туда поехал. очень много спорных моментов даже на идеальной ровной безопасной дороге А напомню что на жд нет встречки пешеходы побоку и прочее — но там до сих пор нет автономных локомотивов особенно на дальнем следовании. Моё резюме — если они и появятся то толь как модные игрушки — водить будут всегда на уровне сверхосторожного подростка укравшего машину у папика и никогда не будут быстрее доставлять пасажира до точки назначения. Пока на дорогах будут встречаться машины с людьми за рулем — никаких роботакси реально существовать не будет. попытки и симуляции по одному и тому же маршруту — пожалуйста а вот так как вы говорите — неа никогда.
Если чтото забыл — напомните ;)
lingvo
Вы, да и я, каюсь, тоже, забыл об одном очень простом способе рассеивать энергию — простом тормозном резисторе. В импульсном режиме эти резисторы способны рассеивать мегаватты мощности за секунды. И никаких проблем сделать нужные защиты и предохранители, так как можно поставить два, три независимых резистора. При отказе одного тормоза не откажут, а диагностика легкая.
Знаете, цена электроники сегодня — это последнее, на что стоит обращать внимание. Потому что она на 99% зависит от объемов производства. Сложнейшее по меркам электроники устройство — тот же мобильный телефон, стоит 500 баксов, потому что их производят миллионами. Процессоры, которые пять лет назад стоили десятки тысяч, так как производились единицами, сейчас стоят несколько сотен баксов, так как производятся тысячами. Будут автомобильные тормозные контроллеры производиться миллионами — будет соответствующая цена. Контроллер Теслы за 2,5 тыщи баксов? Ну узнайте цену на такой контроллер лет через пять, когда электромобили будут производиться десятками миллионов.
Ну вы бы еще кукурузник вспомнили. Мы же говорим о принципиально возможности — можно или нельзя? И я говорю — можно. Есть Superjet, есть A380 — и в них механического резерва нет. Значит уже научились делать электронику, которой можно полностью доверять такую ответственность, как управление самолетом. Значит и тормоза сделать можно.
Как это? Я же не говорю про то, что что-то не будет импульсно работать. Нет, я просто говорю, что система из-за неисправности датчиков или контроллера может подумать, что вы едете по льду и будет спокойно вести себя, как должна была бы вести в данных условиях. Где вы видите механические блокировки против такого поведения?
Напомню. Одной Россией и ее дорогами мир не ограничивается. От слова никак.
MahMahoritos
striver
Если они мало используются, то они могут ржаветь. Но еще до того, как поржавеют, они должны быть в кондиции для торможения, как минимум разогреты, ибо если холодные и резко тормозить, то эффективность очень сомнительна. Поэтому, да, нужны инновации. При переходе на автомобили пришлось отказаться от кондовых подков.
MahMahoritos
Очевидно, что подковы нужны копытам, которых нет в автомобиле. В электромобиле все еще есть колеса, так к чему эта глупая демагогия?
Какова эффективность торможения через генераторный режим на резистор? Хватит насиловать логику, ты уже просто вымучиваешь аргументы в попытке хоть как-то оправдать идею-фикс — удаление традиционных торомозов. Именно это и есть «инновации ради инноваций», это не более, чем вредительство дилетанта-пионера, который рассуждениями пытается лезть в тему, которой не понимают. Чего хотя бы стоят заявления про необходимость прогрева. Это чушь, 99% автомобилей экстренно тормозят без всяких предварительных разогревов — ты только что 5 минут, как ехал, томозя лишь накатом, а тут бац, и на месте надо остановиться резко. А на трассе много автомобилей прогревают тормоза перед резким вынужденным торможением или таки обычно едут полчаса-час, не притрагиваясь к педали тормоза ни разу? Именно под эти условия тормозную систему серийных автомобилей проектируют и тестируют, а не под режим гонок.Посмотри соседнюю ветку про лифт, там хотя бы вариант с реверсивным включением тех же двигателей предлагают, но и там есть фундаментальные препятствия, почему такое торможение не может быть экстренным.
striver
lingvo
Дисковые тормоза не проще резистора. Не обманывайте себя. Привести список того, чего там может поломаться?
Такая же, как и при инверторном — эквивалентна мощности мотора/инвертора. А какова эффективность торможения дисковыми тормозами?
clawham
эээненене… давайте так… частотники знаете? те которые крутят асинхронники с разной частотой? их уже лет 20 делают миллиардами… чот дешевле 50 уе за киловатт никак не выходит готовое издение. у электроники всегда есть нижний порог ниже которого не упасть.
и резистор не панацея — они тоже перегорают и так далее но а самое главное — А ЗАЧЕМ? колодочные тормоза делают то же самое намного дешевле эффективней надежней проверенней.
По поводу супержета и прочих где нет мех дублеров — ну я вам сочувствую… молитель индусским богам чтоб индусские програмисты не написали индусский код… тот же боинг вот расхлебывает уже впрочем трем самолетам и всему их экипажу это уже все равно. так что никогда я бы никуда не полетел на этих флай бай вайр.
Люди научились убеждать других людей в том что это безопасно но как програмист я прекрасно понимаю — это полный бред и абсурд. достаточно вспомнить пример с первым аппаратом радиолучевой терапии. там примитивный компьютер был и выбирал сервоприводом фильтр для лампы — 20 человек вместо терапии получили ядерным реактором в тело. причем глюк проявился только если очень быстро вводить параметры а обычные тесты прогоны и програмисты — никак не могли выявить где ж оно засело
так что нет… спасибо… увижу машину без колодочных тормозов — обойду 10-й дорогой. и вам советую
lingvo
Ээээ, давайте так. Я частотники знаю, так как делаю системы управления для них на сотни мегаватт. И поэтому объясните мне пожалуйста причем здесь цена силовой электроники, если она и так уже стоит в электромобиле? Не в курсе, что частотник и разгоняется и тормозит с помощью одного и того же инвертора?
Интересно, и почему же раз тормоза такие надежные и проверенные, в автомобилях до сих пор ставят как минимум два независимых тормозных контура?
clawham
вы сказали что цена на 99% зависит от обьемов я доказал что это не так. Вы сказали что тормоза не нужны я доказал что нужны. вы начали переть линию что их там два контура — да хоть 4 мне то какое дело? цена от этого не меняется никак а надежность повышается. я только за такие решения — надежные, легкодиагностируемые и дешевые.
Да я вкурсе как могут тормозить частотники т.к. сам занимаюсь разработкой частотных приводов и потому прекрасно понимаю сколько там потенциальных мест где может закрасться глюк и выловить на тестах вы его никогда не сможете т.к. я и есть тот програмист который пишет эти прошивки. поверьте мне некоторые глюки которые легко воспроизводятся чтоб выловить откуда они берутся надо по неделе в дебагере сидеть. а те что ещё и невоспроизводимые простыми путями ну… это просто нереально.
Так что закрыли демагогию — никто никогда в здравом уме ни поворотники ни тормоза механические ни габаритные огни не упразднит. просто ни ко гда.
lingvo
А теперь поверьте мне. Знаете, ведь я тоже когда-то был тем самым программистом как вы, который все глюки вылавливал на стенде. А потом мне сказали разработать прошивку для частотника мощностью 100МВт+ и отладить… без стенда. И не спалить его при первом включении.
И представляете, оказывается так тоже можно. Называется моделирование, симуляция, автоматическая генерация кода. Для таких вещей даже существуют HIL симуляторы реального времени с временем реакции в 1мкс и меньше, стоимостью от 100к$+. Имитируют, знаете ли, моторы и инверторы любой мощности. И хорошо имитируют, шельмы, воспроизводят все до деталей, только не взрываются при этом, слава богу.
Вы с такими работали, раз говорите, что что-то нереально? Посидеть недельку в дебаггере или вылавливать глюки — это давно пройденый этап для многих уже.
"Когда уважаемый, но пожилой учёный утверждает, что что-то возможно, то он почти наверняка прав. Когда он утверждает, что что-то невозможно, — он, весьма вероятно, ошибается."
Вы же ее и начали, когда написали про:
"По поводу супержета и прочих где нет мех дублеров — ну я вам сочувствую… молитель индусским богам чтоб индусские програмисты не написали индусский код… "
По теме, получается, ответить нечего было? У Боинга, кстати, механическое дублирование было. И не помогло оно.
clawham
с такими конечно же нет — только до 100 квт но это не важно. сам принцип — эмуляторы тесты генераторы кода STL библиотеки и прочее к вашему камнню который наверняка на RTOS работает — писали люди. а люди мало того ошибаются так ещё и не могут не ошибаться. как и пайка может разваливаться от вибраций и тряски, как и бефекты могут быть в силовых ключах или в одном из миллиона транзисторов вашего проца к которому вы с помошью суперэмулятора написали идеальную программу. высокоэнергетические частицы космических излучений могут как изменить ячейку памяти так и ввести любой выход любой микросхемы по технологии CMOS в тиристорное защелкивание. и вот твой 2.5 тонный автомобиль со всей твоей семьей летит с обрыва на скорости 200 кмч ты давиш на тормоз но его нет — тормоз электронный и колодок нет потому что умный человек сказал что все просимулированно и 100% надежно — колодки не нужны.
За сим откланиваюсь — больше отвечать на подобный бред смысла не вижу.
lingvo
Мой камень не на RTOS работает, так как это ПЛИС. А рядом с ней еще одна дублирующая ПЛИС, которая перехватывает управление за 100мкс. А защитой заведуют еще три ПЛИС с голосующим алгоритмом. Так что претензии у меня могут быть только к производителю камня, да и то, как видите, я на это рассчитываю очень мало. И я так понимаю, что с SEU вы боретесь только в теории, в то время как я это делаю на практике.
Да уж сценарий из фильма ужасов, но я еще со времен разработок под лифты не верю во всякие неожиданно обрывающиеся канаты и кровожадные лифты, ездящие с открытыми дверями. Так и здесь не верю, чтобы в машине с электронными тормозами одновременно отказали:
Я смотрю, вы спорите ради спора, но эксперт из вас не очень. Вам надо, чтобы сам Маск вам рассказал, что он отказывается от механических тормозов, или какой-нибудь умный чувак из Ауди, чтобы вы поверили, что это возможно?
Irgen
Ну как можно так уверенно говорить такую чушь?
Пока на дорогах будут присутствовать пешеходы и автомобили, управляемые кожаными мешками, фары и поворотники будут. Роботы могут рассчитывать на что угодно, но поворотники нужны чтобы остальные участники движения знали, куда этот робот собрался поворачивать. А фары нужны не для того, чтобы робот что-то видел, а чтобы его было видно.
Да, проблема. Конденсатор у вас бесконечного объема, или все-таки у него есть ограниченная емкость? А теперь представьте дорогу где-нибудь в горах, где есть долгий-долгий спуск, на котором нужно все время немного подтормаживать. Вот заполнилась батарея, вот заполнился конденсатор, что делаем дальше? Остаемся без тормозов?
А стоимость всего этого веселья оплатите вы лично? И да, тут не так давно два самолета упало в том числе из-за того, что контроллеров вроде несколько, а договориться они между собой не смогли.
Демагогия в чистом виде. Есть масса устройств или их компонентов, которые просто нет смысла менять на что-то еще, так как они полностью удовлетворяют требованиям к ним. Карандаш, например. Есть ручки, фломастеры, электронные планшеты, но карандаши всё еще актуальны. И механические часы используются еще много где. Даже если не считать аксессуары за +100500 денег, которые поголовно механические.
Bedal
CAN-шина передаёт в стандартном режиме 50кбит/сек, в специальном 100кбит/сек, в Тесле стоит предельная многопроводная версия с 1 Мбит/сек.
Быстрее эта шина не может передавать в принципе. Ещё большие проблемы у неё с лагами доставки двунаправленной передачи. Режим управления с обратной связью в этой шине организовывать… объясняется только стремлением сделать пораньше и подешевле.
два редуктора — уже техническая глупость, оправдываемая только локальным «не шмогла».
Ещё раз — множество водителей ездит так уже сейчас, и считает это удобным и основным режимом. Всё остальное решится со временем, куда оно денется.
clawham
быстрее 1-го мегабита кан работать не может?
Божечки а как жеж я использую вот такие микрухи на 2 мегабитах и никаких проблем?
datasheets.maximintegrated.com/en/ds/MAX3053.pdf
а есть ещё круче
ww1.microchip.com/downloads/en/DeviceDoc/ATA6570 5 мегабит
ww1.microchip.com/downloads/en/DeviceDoc/Atmel-9340-Can-Van-Networking-ATA6570_Datasheet.pdf.pdf 4 мегабита
Вы лично ездили на электромобиле? том же лифе не один раз а ну вот с месяцок? у него рекуперация на секундочку 30 киловатт из 80-ти доступных для разгона. кажется вродебы сильно ощутимой мощностью но НЕТ.
На той же тесле тоже в общем-то впринципе на максимальном режиме оно довольно ощутимо тормозит но в 60% случаев недостаточно. 60% обычных случаев и 100% екстренных и аварийных случаев!!! что такое аварийный случай? вылетела собака перед мордой автомобиля на 40 кмч. ну вот просто под колеса — тормози я рекупом то через пару трупов такой собаки только бы появилось полное тормозное усилие — напомню для тех кто не вкурсе — во всех электромобилях усилие рекуперации появляется плавно гдето с 1-2 секунды до полного возможного. я просто ударил по мехтормозу и вуаля — остановился в ноль в 10 см от дурной собаки она побежала дальше. Так что забудьте идею отказа от колодочных тормозов в автомобиле. пока там будут колеса — там будут и колодочные тормоза. Ну или ленточные или вискомуфтовые или на маггнитореактивной жидкости — не важно — механическое заклинивание вала колеса. не силовым двигателем.
striver
Проблема в том, что электродвигатель может крутится в обратном направлении также хорошо, как и «вперед». При этом очень быстро обороты могут уходить вверх и вниз. Торможение двигателем вы просто игнорите.
Bedal
К чему эти эмоции? В нормальной городской езде рекуперационного торможения вполне достаточно. По крайней мере, при езде по Лондону — из личного опыта.
Для экстренного торможения — да, нужен механический тормоз, кто с этим спорит?
clawham
товарищ тут один писал
Bedal
всё так. Но полного отказа не будет в обозримом будущем. Всё те же две причины:
— экстренное торможение
— фиксация остановки.
clawham
тот же преславутый лиф прекрасно может мотором фиксировать положение. намертво до срыва колес. но эта функция реализована только как противооткатная при старте в горку. почему? а тратить 5 киловатт электроэнергии просто чтоб стоять на уклоне — глупость.
lingvo
Напомню для тех кто не в курсе, что это просто так оно сегодня реализовано, но технически ничего не мешает сделать электронную педаль тормоза, которая будет работать не хуже обычной в том числе и при аварийном торможении. Вы, например, знаете, что тот же лифт сегодня замедляется не хуже, чем разгоняется и все это делается за счет рекперации? При этом ему не надо 1-2 секунды, чтобы подумать. Он просто так работает.
clawham
о да знаю. там червячная мехпередача которая тормозное усилие в 10 раз увеличивает кроме того я знаюю параметры выбега лифтовых частотников при переходе на рекуперацию — 5 секунд для градиента скорости 600-50 обмин. Кроме того давайте вы сравните размер мотора у лифта и мощность в него подаваемую. так я вам скажу — 120 кило мотор при мощности 2 киловата. при рекуперации с него снимается всего до 800 ватт. И там зачастую применяется торможение постоянкой а не рекуперация а это адски нагревает ротор т.к. вся энергия на роторе и рассеивается но там той энергии настолько мизер а время активной работы настолько мало что этим можно пожертвовать.
для этого есть фундаментальное ограничение — нужно по хитрому перемагнитить ротор потому даже если задержку убрать в ноль а ток рекупа поставить 100% рекуперация нарастает плавно у асинхронников.
в БЛДС с этим получше но всеравно как минимум 0.3 секунды задержка есть т.к. никто не сможет предсказать при каком заполнении ШИМа вы уже вылетите за пределы фазного тока — приходится наращивать шим на единичку и смотреть ток не вылетел? ок наращиваем ещё на единичку и снова смотрим ток не вылетел и так далее. а проблема в том что ток нарастает не мгновенно с изменением ширины ШИМа изза огромной индуктивности а плавно и частота шима обычно конечная и всего 6-9 килогерц. так что чтоб пройти все 1024 ступеньки шима нужно всеравно не менее 0.3-0.5 секунд и никакие транзисторы контроллеры программы тиехнологии в этом никому не смогут помочь.
Это многим не понятно кто не сталкивался с проектированием частотников и не пытался их тормозить электрическим путем.
в общем этот спор бесполезен — моя позиция — какими бы ни были частотники и моторы и сколько бы их там ни было — механическая тормозная система всегда будет на месте пока передвигаемся на колесах. я не думал что у людей в этом могут быть сомнения. при её стоимости она обеспечивает беспрецедентную надежность и широту выполняемых функций. рекуперация всегда будет дополнять и помогать но никогда не заменит. Впрочем даже у самокатов с полным приводом на заднем всетаки есть мех тормоз хотя и электронный тормоз там превышает все способности человека удержаться на этом самом самокате. но тем не менее мех тормоз есть для безопасности.
lingvo
Извините, но тут какой-то поток несвязного текста. Вы похоже про лифты вообще не в курсе.
Это не выбег, а запрограммированная кривая торможения, обусловленная плавностью хода. Как это влияет на то, что я сказал?
Тут какой-то бред. Во первых мощность обычного мотора у пассажирского лифта начинается от 3кВт. Во вторых мотор на 7,5кВт, который уже позволяет тягать лифт на 600кг, весит всего 70кг. В третьих а ну-ка посчитайте по законам физики, какая мощность должна рассеиваться при рекуперации при движении вниз с постоянной скоростью 1м/с полностью загруженного лифта грузоподъемностью 400кг с последнего этажа на первый? КПД редуктора/двигателя там 0,85 если думаете, что это поможет.
clawham
я вам даже ссылку на видео дал.
у лифтов какбы противовес есть и мотор может не то что ничего не затрачивать а наоборот нарабатывать в сеть рекуперацию т.к. противовес тяжелее кабины.
Ещё раз повторюсь — вы привели неудачный пример системы где какраз мизерные мощности огромные веса и ВНЕЗАПНО есть механический тормоз да к тому же две разные системы торможения вообще — одна в моторе а вторая в кабине. причем с двумя независимыми приводами — электрический привод и чисто механический для каждого из видов этих тормозов. так что как видите рекуперация надежность будущее а колодки никто не отменял.
lingvo
Извиняюсь, но внезапно вопрос — о каких тормозах в лифтах вы говорите, и какая у них функция? Вы о ловителях и стояночном тормозе? И как они относятся к усилию замедления, создаваемому частотником?
clawham
и ловители и мех тормоз либо на валу двигателя либо прям в него встроен либо на ведущем шкиве у безмашинников. при этом ловители нормальнооткрытые а тормоза на валу — нормально закрытые — тоесть обрыв любой цепи безопасности глюк электроники пропадание света перерубание проводов обрыв беличей клетки мотора или разрыв муфты лебедка-двигатель, вылету шариков из подшипников и так далее — приводит к мгновенному зажиму тормозов.
Ловители — последний рубеж безопасности. срабатывают и на обрыв канатов и на превышение скорости и даже на перекос кабины в салазках. причем есть как односторонние так и двусторонние — они срабатывают не только на падение но и на попытку привода разбить вас о потолок тоже.
При этом как не было бы печально — иногда таки и этих мер недостаточно. не помогли ни ловители ни мех тормоз лебедки ни рекуперация — целовек с дитем разбились например недавно в киевской новостройке. да эти случаи единичны но… везде есть человеческий фактор. везде есть отказы техники. и чем эта техника сложнее тем больше точек вероятного отказа.
Относятся только тем боком что ради безопасности они там есть. они там будут и они оттуда никогда никуда не денутся. я думаю вам не нужно обьяснять почему тормоза для автомобиля это вещь от которой зависят жизни не только пассажиров этой машины? Рекуперация удобна мощна приятна регулируема НО она всегда будет ДОПОЛНЕНИЕМ к нормальным обычным привычным надежным механическим тормозам.
lingvo
И соль в том, что вы рассказываете об отказах механики, отработанной десятилетиями. Точно также как и в автомобилях до сих пор отказывают ваши "надежные" механические тормоза. И несмотря на все усовершенствования это будет происходить и далее.
В то же время, раз вы в курсе лифтов, в последнее время полностью отказались от двойного разрыва силовой цепи подъемного двигателя. Т.е. если раньше питание привода перемещения кабины должно был разрываться как минимум двумя контакторами, то сегодня достаточно одного, а второй разрыв реализуется силовой электроникой частотника.
То есть видите, даже в лифтах от механики и дубовой электрики переходят к электронике ради экономии одного вшивого пускателя, в то время, как механику еще не довели до конца. Куда катится мир?
Но относительно обсуждаемой темы вы тем не менее делаете неправильный вывод. В тех же лифтах механический тормоз и ловители — это уже давно не основная рабочая система торможения, а дополнительная, которая срабатывает и рассчитана на срабатывание только в экстренных случаях и при отказе отдельных элементов лифта.
clawham
а я о чем? хоть резервной аварийной но механика останется всегда.
Да и пускатели не изза цены а изза их низкой надежности упраздники оставив один. при этом условием стало наличие мех тормоза способного остановить мотор на полной мощности — тоже почитайне внимательно — какие там сейчас мощные тормоза стали ставить вместо того вшивого пускателя.
lingvo
Да пусть остается. Но не стоит забывать, что если теперь мы говорим о ней, как о резервной или аварийной системе, к ней будут применяться совершенно другие требования и она может строиться на совершенно иных физических принципах — т.е это не обязательно должны быть вентилируемые дисковые тормоза.
Как, например, в трамваях и поездах сделан магнито-рельсовый тормоз — простая, примитивная конструкция, которая тем не менее отлично выполняет свою функцию аварийного торможения и стояночного тормоза, но не является основной системой торможения.