

В поисках таинственных мест нам нет нужды отправляться к далеким планетам, достаточно взглянуть на океаны и моря родной Земли. Лишь малая доля того, что скрывает в своих глубинах мировой океан, была открыта и описана учеными. Попытки изучать подводный мир сопряжены с рядом сложностей, которые с той или иной степенью успешности удается превозмочь с помощью технологического прогресса и его плодов. Однако, даже самые современные системы наблюдения и мониторинга пока не достойны звания универсальных инструментов изучения подводной флоры и фауны. Потому ученые из Массачусетского технологического института (США) решили создать свой инструмент — камеру, способную делать цветные изображения высокого качества даже в темноте. Данное устройство при этом не имеет батареи, а питание и коммуникация осуществляются за счет звуковых волн. Как именно работает чудо-камера, какие ее возможности, и какие секреты с ее помощью мы сможем раскрыть? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Изучение подводного мира, в том числе и животных, растений, рифов и даже мусора, является одним из важнейших процессов мониторинга климатической ситуации на планете. Глядя на подводный мир, мы можем оценить то, как деятельность человека влияет на экологию. Кроме того, многие ученые считают, что именно океан станет основным источником пищи для будущих поколений. Даже изучение космоса и робототехники тем или иным образом связано с изучением подводного мира. Другими словами говоря, изучая океанские глубины человек не только удовлетворяет свое любопытство, но и получает множество полезной информации, применимой в самых разных отраслях.
Несмотря на развитие технологий и появление новых технических возможностей для визуализации подводного мира, пока большая часть этой среды остается неизученной. Одним из самых существенных ограничений для подводных камер является необходимость связи с кораблем или батискафом для передачи данных и для получения энергии. Когда такой связи (в физической ее форме) нет, то камеры полагаются на батареи, которые не обладают бесконечным сроком службы, а их замена сопряжена с дополнительными сложностями и расходами.
Одним из решений энергетической проблемы для подводных камер предлагается использование энергии океанских волн, подводных течений, температурных градиентов или солнечного света. Однако внедрение дополнительных систем, которые будут собирать и конвертировать энергию, сделают подводные камеры не только дороже, но и габаритнее. В таком случае некоторые области подводного мира станут недоступны для изучения. Следовательно, данная проблема пока не имеет разумного решения.
Авторы рассматриваемого нами сегодня труда предложили свой выход из положения — подводное обратное рассеяние — метод беспроводной и безбатарейной визуализации подводной среды. Разработанное устройство, по словам ученых, потребляет в 5 раз меньше энергии, чем другие устройства подводной визуализации. Следовательно, такая камера может работать исключительно за счет собираемой энергии, т. е. не нуждается в дополнительных аккумуляторах.
Результаты исследования
Изображение №1
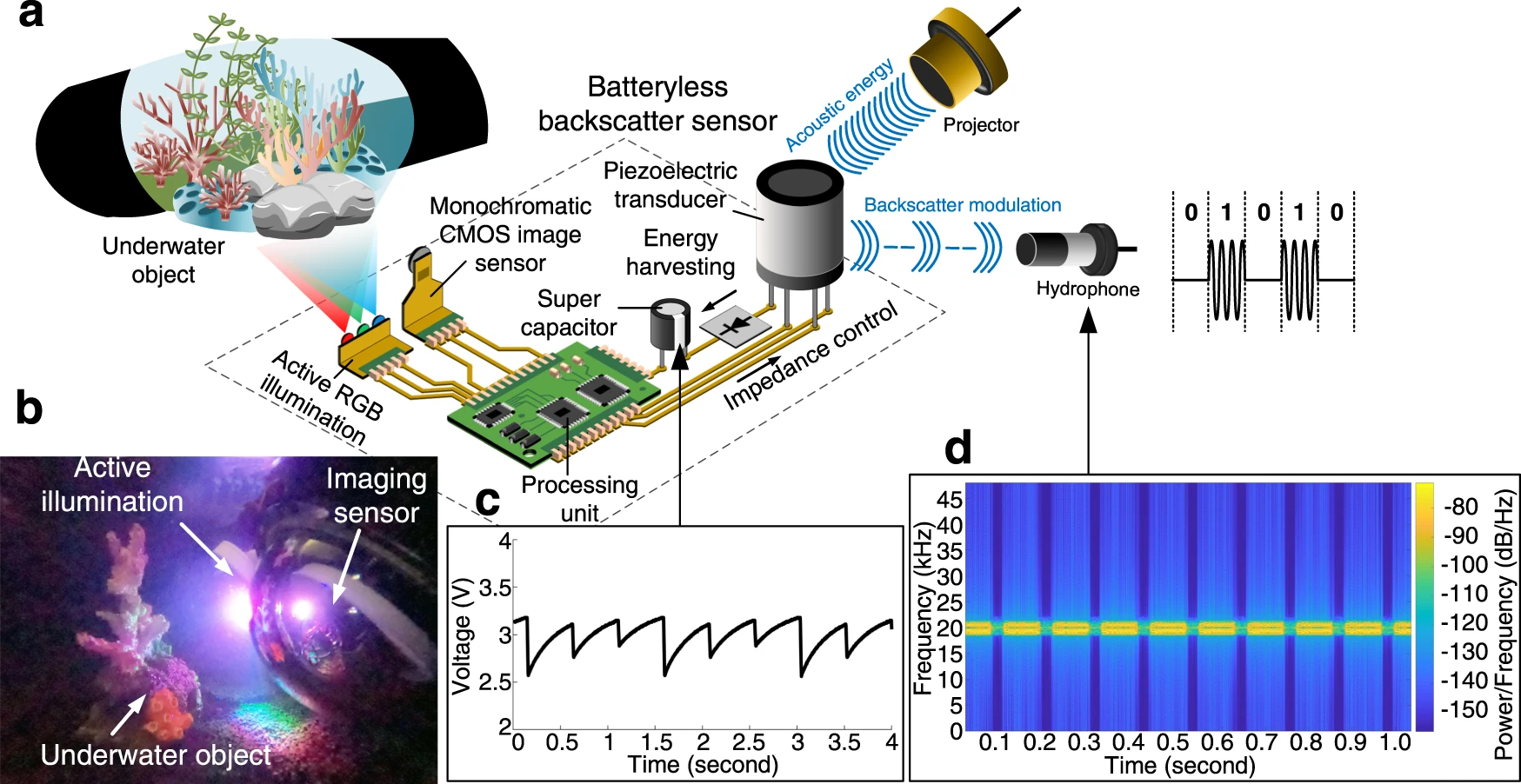
Разработанное устройство включает в себя полностью интегрированные операции со сверхнизким энергопотреблением, включая оптическое зондирование, активное освещение, обработку и беспроводную связь. Оно способно выполнять пассивную визуализацию, а также активную цветную визуализацию с использованием активного освещения со сверхнизким энергопотреблением, за счет чего работа может осуществляться даже в условиях полного отсутствия естественного света. Полученные во время визуализации кадры передаются на удаленный приемник, который использует их для восстановления цветных изображений подводной среды.
Камера может работать от энергии, полученной из внешних источников, таких как акустическая, солнечная, тепловая энергия или энергия океанских течений. Ученые решили использовать именно акустическую энергию из-за высокой эффективности, малой стоимости и распространения волн на большие расстояния в подводной среде.
На изображении 1a показана схема ключевых компонентов системы беспроводной визуализации. Данные визуализации передаются с помощью акустического сигнала по нисходящей линии связи. Энергию же устройство получает также от акустического сигнала с помощью пьезоэлектрических преобразователей. Полученная акустическая энергия преобразуется в электрическую, выпрямляется с помощью двухполупериодного выпрямителя и сохраняется в суперконденсаторе. Когда накопленная энергия достигает минимально необходимого порога, она автономно активирует блок управления питанием для регулирования напряжения и подачи энергии на встроенный блок обработки и памяти, а также на сверхмаломощные генераторы.
Блок обработки и генератор запускают монохроматическую CMOS-камеру со сверхмалым энергопотреблением и бортовую подсветку для захвата изображения подводного объекта (1b). Весь процесс визуализации осуществляется за счет энергии, собранной в суперконденсаторе, запасенное напряжение которого меняется со временем в зависимости от потребляемой мощности на различных этапах обработки (1c).
Как отмечают ученые, важным аспектом безбатарейной визуализации является разработка метода связи, который также будет потреблять крайне мало энергии. В частности, коммуникационный компонент системы не должен потреблять больше энергии, чем может быть собрано от удаленного источника звука, который обычно составляет от нескольких десятков до сотен микроватт. Однако современные маломощные подводные модемы связи требуют 50–100 мВт для связи на десятки метров. Таким образом, им потребуется на 3-5 порядков больше энергии, чем та, которая доступна при сборе акустической энергии. Следовательно, такие модемы попросту не смогут работать без батарей, что является одной из отличительных черт разрабатываемой камеры.
Чтобы не выходить за рамки энергетических ограничений, ученые использовали для передачи данных обратное пьезоакустическое рассеяние. Подводное пьезоакустическое обратное рассеяние передает сообщения, модулируя коэффициент отражения своего пьезоэлектрического преобразователя (1а). Таким образом, безбатарейный узел кодирует пиксели в коммуникационные пакеты, переключаясь между различными электрическими нагрузками (катушками индуктивности), подключенными к преобразователю. Переключение осуществляется простым управлением двумя транзисторами и требует всего лишь 24 нановатта. Удаленный гидрофон измеряет принятый акустический сигнал, чтобы обнаружить изменения в картинах отражения из-за обратного рассеяния (1d). Сигналы отражения декодируются и используются для восстановления изображения, снятого камерой.
Устройство визуализации позволяет получать цветные изображения подводных объектов при сверхнизкой мощности даже в условиях низкой освещенности, что является вполне распространенным явлением для морских глубин из-за поглощения света в толще воды. Для достижения этого используется датчик изображения CMOS со сверхнизким энергопотреблением (HM01B0 от Himax Corporation), который может захватывать монохроматические изображения. Для получения цветных изображений использовались три монохромных светодиода (LED): красный, зеленый и синий. Блок обработки и памяти (IGLOO nano FPGA) попеременно активирует каждый из этих светодиодов и фиксирует монохроматические изображения при каждом активном цикле освещения (2а).

Изображение №2
Монохроматические изображения акустически рассеиваются обратно на удаленный приемник. После кодирования каждого из снимков приемник синтезирует полученные пакеты в пиксели, применяя их к RGB каналам массива цифровых пикселей для восстановления цветных изображений (2b, видео ниже).
Видео №1
Таким образом система представляет собой беспроводную камеру без батареи (2c), которая собирает энергию и обменивается данными с использованием обратного пьезоэлектрического рассеяния (2d). Собранная энергия расходуется в циклах, которые чередуются между визуализацией и коммуникацией (2e). После захвата сегментов изображения процессор пакетирует пиксели и передает их с помощью обратного пьезоакустического рассеяния при потребляемой мощности в 59 мкВт.
Чтобы справиться с несоответствием пропускной способности между CMOS датчиками (несколько Мбит/с) и подводным акустическим каналом связи (несколько кбит/с), захваченные изображения буферизируются в ячейках памяти.
Для скорости акустической связи 1 кбит/с эмпирические измерения демонстрируют среднюю потребляемую мощность в 276.31 мкВт во время цикла активной визуализации. Во время пассивной визуализации, когда нет нужды в освещении диодами, потребляемая мощность падает до 111.98 мкВт.
Изображение №3
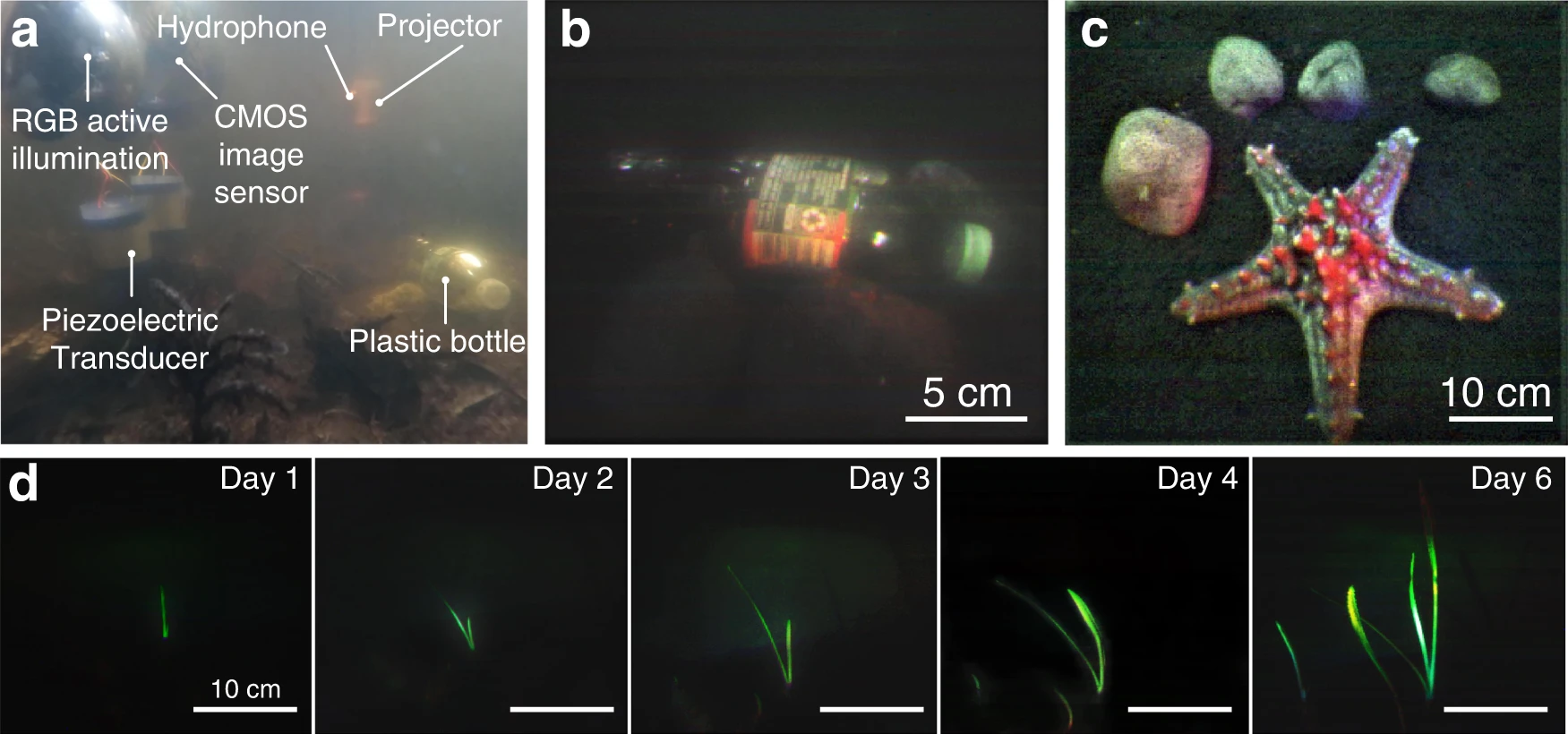
Дабы продемонстрировать возможности разработанной системы визуализации ученые провели практический эксперимент. Испытуемый прототип был использован в озере Кейзер на юго-востоке Нью-Гэмпшира, где он использовался для визуальной оценки загрязнения пластиковыми бутылками дна озера на расстоянии 50 см (3а). Несмотря на наличие внешнего освещения, камере удалось получить цветное изображение с помощью монохроматического сенсора (3b). Также камера сделала вполне детальный снимок морской звезды вида Protoreaster linckii (3c).
Благодаря отсутствию необходимости в подзарядке камера могла наблюдать за ростом Aponogeton ulvaceus в реальном времени. На 3d показан результат непрерывной работы камеры в течение недели. В этот период камера полностью полагалась на собранную акустическую энергию и собственное освещение.

Изображение №4
Ученые заявляют, что преимущества подводной визуализации с обратным рассеянием касаются не только наблюдательного мониторинга, но и более сложных задач, таких как подводная локализация и логические выводы. Чтобы продемонстрировать выполнимость таких задач, был использован метод визуализации для обнаружения и локализации визуальных меток AprilTag (4a), которые ранее использовались в опытах с подводными роботами. На 4b показан снимок данной метки, сделанный тестируемой камерой. На 4c показаны точность обнаружения и расстояние локализации метки. Результаты демонстрируют очень высокую скорость обнаружения и высокую точность локализации до 3.5 м (ошибка локализации составляла менее 10 см).
Дополнительно была проверена способность камеры собирать энергию и поддерживать коммуникационную связь на большом расстоянии от приемника. Для этого камеру поместили в реку Чарльз в восточном Массачусетсе. На графике 4d показано полученное напряжение в реке по мере увеличения расстояния между источником и безбатарейным датчиком. Как и ожидалось, собранное напряжение уменьшалось с увеличением расстояния.
В аспекте связи оценивались отношение сигнал/шум (SNR) и коэффициент битовых ошибок (BER) (4e). Как видно из графика, SNR снижалось, а BER увеличивался с расстоянием, демонстрируя возможность надежного декодирования пакетов на расстоянии более 40 м за счет использования DFE (decision feedback equalizer) в приемнике.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали свою уникальную разработку — беспроводную автономную систему визуализации для подводной среды, которая не нуждается в батареи. Секрет такой чудо-камеры заключается в использовании акустических волн.
Камера получает энергию с помощью пьезоэлектрических преобразователей, которые производят электрический сигнал при воздействии на них механической силы. Когда на преобразователь попадает звуковая волна, возникает вибрация (т. е. механическая энергия), что в последствии и конвертируется в электрическую энергию.
Для получения цветных изображений, сделанных в среде с низким уровнем освещенности, ученые решили использовать обычные светодиоды красного, зеленого и синего цветов. Если естественного света мало, то камера делает снимок с включенным красным диодом, затем синим и зеленым. Полученные снимки можно скомбинировать для получения полноценного цветного изображения подводного объекта.
Передача данных от камеры на приемник также осуществляется с помощью акустических волн. После съемки снимки кодируются как биты (т. е. 0 и 1) и отправляются на приемник по одному биту за раз посредством обратного рассеяния. Это означает, что приемник посылает звуковые волны на камеру, которая их отражает или поглощает. Гидрофон рядом с передатчиком определяет, отражается ли сигнал от камеры. Если он получает сигнал, это 1, а если сигнала нет, то это 0. В результате двоичный код используется для реконструкции и последующей обработки изображения. При этом камера способна успешно передавать данные на расстояние около 40 метров.
Практические испытания системы показали отличные результаты, но это не предел возможностей данного устройства, заявляют ученые. В будущем они намерены реализовать ряд усовершенствований, которые коснутся увеличения объема памяти и расширения коммуникационного диапазона камеры.
Ученые уверенно заявляют, что их творение станет отличным инструментом для изучения океанических и морских глубин. Ведь чем больше мы знаем об этих таинственных средах, тем лучше мы понимаем окружающий нас мир. А это в свою очередь может подтолкнуть нас к принятию важных решений, способных улучшить экологическую ситуацию и спасти многие виды от вымирания.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?