
Путешествие в тысячу ли начинается с одного шага. (Лао-Цзы)
Что делает код хорошим? Большинство программистов ответят: хороший код должен быть структурирован, легко читаем и понятен. Но так ли важно качество кода, если он медленный? В большинстве задач производительность кода не критична, хотя и желательна. Но есть задачи, время выполнения которых столь огромно, что выигрыш в производительности доминирует над всем остальным.
Я говорю про NP-трудные задачи (NP-трудность - недетерминированная полиномиальная трудность по времени) и на одной из данного класса хочу акцентировать ваше внимание. Задаче коммивояжера.
Мы не будем рассматривать эвристические алгоритмы, нам нужно точное решение.
На данный момент не существует известного алгоритма способного найти точное решение задачи коммивояжёра в общем виде за число шагов выраженного, как полином фиксированной степени от размера входных данных.
В прошлой работе мы ознакомились с решением задачи коммивояжера на минимум методом динамического программирования. Метод конечно замечательный, но он ограничен объёмом памяти системы. Уже при n = 28 вершин, 16 Гб оперативной памяти недостаточно, а использовать память жёсткого диска очень неэффективно. Возможно, используя хитроумные подходы структурирования и сжатия памяти можно несколько улучшить алгоритм, но ненамного. Нужен иной подход, если мы хотим рассчитывать матрицы большего размера.
Метод ветвей и границ, пожалуй, самый известный и эффективный метод нахождения точного решения задачи коммивояжёра. Не будем тут останавливаться на его описании, в интернете существует множество подробных мануалов с примерами. Для новичков рекомендую статью где, на мой взгляд, всё описано понятным языком.
Так же в своё время разобраться с тонкостями алгоритма мне помогла работа. Как и её автор, я прошёл тот же путь, и совершил ровно те же ошибки, главная из которых заключалась в том, что при невозможности получить приемлемые результаты, начал использовать эвристики. Ещё один любопытный подход.
Хочу обозначить одну тонкость метода ветвей и границ, которую мало кто освещает:
На этапе выбора элемента ветвления и разделения решения на два подмножества M1 (содержащие ребро с максимальным штрафом) и M2 (не содержит ребро с максимальным штрафом), при рассмотрении множества M1 вычеркиваем относящиеся к выбранной клетке строку и столбец, а также заменяем значение ячейки соответствующей обратному пути на бесконечность.
Но вот что скрывается под понятием обратного элемента? Во многих реализациях, что я видел, смысл определения выражен не верно, проиллюстрируем.

Есть некий граф, для которого на предыдущих этапах мы уже нашли рёбра [0, 3], [3, 5], [6, 7], [7, 1] и на текущем шаге рассматриваем ребро [5, 6] множества M1.
Так вот обратным элементом для ребра [5, 6], будет не ребро [6, 5] (как можно было подумать), а ребро [1, 0]. И вычёркиваем данное ребро затем, чтобы избежать в графе подцикл. Естественно, мы так же вычёркиваем все дуги, исходящие из [5] (вычеркивание строки) и входящие в [6] (вычеркивание столбца).
Так вот, для получения обратного элемента нужно найти голову и хвост пути, вместе с которым добавленное ребро образует единую ветвь и уже для такого пути взять обратный элемент.
Игнорирование сего факта очень часто заводит полный перебор в тупик, про точное решение промолчу.
Далее по ходу текста я буду выдвигать утверждения, которые кому-то могут показаться спорными, просто примите за факт.
Метод ветвления и границ при полном переборе очень эффективный метод, но у него есть одна отвратительная черта: рекурсия. Мы постоянно делим дерево решений на два подмножества, каждое из которых занимает место в памяти, плюс добавим сюда расходы на рекурсию и служебные переменные, при больших размерах дерева ветвлений это огромная проблема. Мало того, что оперативной памяти может просто не хватать, так ещё и обращение к разным участкам памяти не самое дешёвое удовольствие.
Авторский подход заключается в том, чтобы рассматривать задачу коммивояжёра не как академическую, а как инженерную.
Вся суть сводится к тому, что мы несколько отклоняемся от алгоритма, предложенного Литлом, в сторону увеличения количества шагов при обходе дерева ветвлений, но зато значительно выигрывая из-за организации таких шагов.
Алгоритм состоит в применении трёх мета шагов:
Производим приведение матрицы (редукция строк, столбцов), выбираем нулевой элемент с максимальной оценкой для разбиения.
На каждом ветвлении между выбором множества M1 или M2, всегда двигаться в M1, пока мы не достигнем дна. В матрице останется только один элемент, не предусматривающий ветвления, так мы получаем опорное решение. Сравниваем лучшее с текущим решением и запоминаем его, если оно короче.
-
Далее мы возвращаемся на уровень выше, проверяем для него множество M2 и вычёркиваем клетку. Переходим к шагу 1.
Отдельно остановлюсь на условиях, при которых мы можем досрочно прекратить дальнейшее обследование ветви дерева ветвлений, тем самым сократив объём вычислений.
На первом шаге, если мы понимаем, что в какую-либо вершину или из неё больше невозможно проложить ни одного маршрута;
На втором шаге, если видим, что лучший из найденных пока маршрутов меньше нижней текущей границы;
На третьем шаге, если лучший из найденных пока маршрутов меньше суммы нижней текущей границы и максимальной оценки на шаге;

Для себя назвал подход алгоритмом ныряльщика. Уж больно напоминает мне, как охотник за жемчугом ныряет на дно, хватает раковину, отплывает в сторону, снова ныряет. Дно водоёма не ровное, это и есть дерево ветвления. У пловца есть верёвка, которую выбирают до натяжения, каждый раз как ныряльщик достигает дна. И так до тех пор, пока он не сможет больше достигать дна, кроме одного места, что и окажется минимальным возможным решением.
Вы можете спросить, к чему эти сложности? Именно так мы избавляемся от хвостовой рекурсии при расчёте множества М2 и гарантируем, что глубина рекурсии для множества M1 никогда не превысит n.
А если применить ещё небольшой фокус с выделением памяти только на стеке, не используя динамическое выделение памяти в куче (просить память у ОС относительно дорого), то алгоритм не будет покидать сверхбыструю память L1 процессора. То есть при таком подходе мы не будем использовать ужасную медленную оперативную память, ну разве что только при переключении потоков в ОС.
Например, при n = 33 программе требуется не более 63КБ стека, при любых входных данных.
Из прочих неочевидных оптимизаций:
Предлагаю хранить индексы матрицы одним куском с данными, это здорово сокращает количество операций при копировании в матрицу меньшего размера, а также повышает локальность данных;
Использовать только 32 битные переменные для всего, нужно для выравнивания обращений в памяти (выровненные обращения происходят быстрее);
Использовать максимальное число для расчётов inf = 2147483647 (0x7fffffff), для того чтобы при сложении двух бесконечностей не получать переполнение регистра (не нужно проверять);
Умышленный отказ от операций деления (очень дорогая инструкция);
Переменные по возможности высвобождаются сразу, как перестают быть нужными;
-
Объединить этап редукции с выбором нулевого элемента для разбиения, для уменьшения количества обращений к матрице;
Последняя оптимизация интересна в том, что за один проход можно получить сразу два параметра: минимальное значение для редукции по строке и минимум по той же строке для анализа нулей. Для этого для каждого элемента матрицы применяем функцию two_lows, которая находит два минимума за один проход, что сокращает почти вдвое число обращений к матрице на данном этапе. Аналогично и для столбцов.
Алгоритм изначально разрабатывался на Pascal, затем я конвертировал его на Си и внёс множество изменений не доступных Паскалю, добившись ещё более чем двукратного увеличения производительности на шаг. Для удобства работы в Python обернул в динамическую библиотеку и тестировал производительность уже на ней.
Для самых любознательных
Код внешней библиотеи на Си
//=======================================================================
// Задача коммивояжера (TSP) точное решение — метод ветвей и границ (by ReBuilder)
// https://habr.com/ru/post/708072/
//=======================================================================
const unsigned int inf = 0x7fffffff; // 2147483647
typedef struct TVector {
unsigned int src;
unsigned int dest;
} TVector;
typedef struct TMatrixObj {
unsigned int global_min; // Глобальный текущий минимум расчёта
unsigned int n; // Реальный размер матрицы
unsigned int step; // Шаг алгоритма
TVector *v; // Указатель на массив векторов сохранённых рёбер на текущем шаге [откуда, куда]
TVector *v_best; // Указатель на массив векторов, лучший на текущий момент [откуда, куда]
} TMatrixObj;
void matrix_evaluation(struct TMatrixObj *m, unsigned int *pm, unsigned int index, unsigned int n);
//=======================================================================
// Сохраняет два минимальных элемента при добавлении нового
void two_lows(unsigned int *a, unsigned int *b, unsigned int c)
{
if (c <= *a)
{
*b = *a;
*a = c;
}
else
if (c < *b)
*b = c;
}
//=======================================================================
void matrix_reduction(unsigned int *pm, unsigned int n, unsigned int *max_sum, unsigned int *max_i, unsigned int *max_j)
{
unsigned int sum = 0;
// Организуем кеш для подсчёта веса строки
unsigned int line_cache[n + 1];
// Для каждой строки находим минимум
for (unsigned int i = 1; i < n; i++)
{
unsigned int min1 = pm[i * n + 1];
unsigned int min2 = inf;
two_lows(&min1, &min2, pm[i * n + 2]);
for (unsigned int j = 3; j < n; j++)
two_lows(&min1, &min2, pm[i * n + j]);
// Если хоть одна точка источник не имеет выходов то обрываем расчёт
if (min1 == inf)
{
pm[0] = inf;
return;
}
// Вычитаем минимум из каждой строки (Редукция строк)
if (min1 > 0)
{
if (min2 < inf)
min2 -= min1;
for (unsigned int j = 1; j < n; j++)
if (pm[i * n + j] < inf)
pm[i * n + j] -= min1;
// Прибавляем минимальный элемент к нижней границе
sum += min1;
}
line_cache[i] = min2;
}
*max_sum = 0;
*max_i = inf;
// Для каждого столбца находим минимум
for (unsigned int i = 1; i < n; i++)
{
unsigned int min1 = pm[1 * n + i];
unsigned int min2 = inf;
two_lows(&min1, &min2, pm[2 * n + i]);
for (unsigned int j = 3; j < n; j++)
two_lows(&min1, &min2, pm[j * n + i]);
// Если хоть одна точка назначения не имеет входов то обрываем расчёт
if (min1 == inf)
{
pm[0] = inf;
return;
}
if (min1 > 0)
{
if (min2 < inf)
min2 -= min1;
// Вычитаем минимум из каждого столбца (Редукция столбцов)
// Находим элемент для разбиения, и верхнюю оценку
unsigned int temp_val;
for (unsigned int j = 1; j < n; j++)
{
temp_val = pm[j * n + i];
if (temp_val < inf)
{
temp_val -= min1;
pm[j * n + i] = temp_val;
if (temp_val == 0)
{
temp_val = line_cache[j] + min2;
if (temp_val >= *max_sum)
{
*max_sum = temp_val;
*max_i = j;
*max_j = i;
}
}
}
}
// Прибавляем минимальный элемент к нижней границе
sum += min1;
}
else
{
// Находим элемент для разбиения, и верхнюю оценку
unsigned int temp_val;
for (unsigned int j = 1; j < n; j++)
if (pm[j * n + i] == 0)
{
temp_val = line_cache[j] + min2;
// выбираем значение с максимальной суммой минимумов по строке и столбцу
if (temp_val >= *max_sum)
{
*max_sum = temp_val;
*max_i = j;
*max_j = i;
}
}
}
}
// Нижняя граница - стоимость меньше которой невозможно построить маршрут
// Если нет элемента для разбиения, то блочим ветку
if (*max_i == inf)
pm[0] = inf;
else
pm[0] += sum;
}
//=======================================================================
int head_search(unsigned int *pm, struct TVector *v, unsigned int n, unsigned int index, unsigned int dj)
{
unsigned int l = 0;
do
{
if (v[l].src == dj)
{
dj = v[l].dest;
l = 0;
continue;
}
l++;
} while (l < index);
for (l = 1; l < n; l++)
if (pm[l * n + 0] == dj)
break;
return l;
}
//=======================================================================
int tail_search(unsigned int *pm, struct TVector *v, unsigned int n, unsigned int index, unsigned int di)
{
unsigned int l = 0;
do
{
if (v[l].dest == di)
{
di = v[l].src;
l = 0;
continue;
}
l++;
} while (l < index);
for (l = 1; l < n; l++)
if (pm[0 * n + l] == di)
break;
return l;
}
//=======================================================================
void martix_in_depth(struct TMatrixObj *m, unsigned int *pm, unsigned int n, unsigned int index, unsigned int di, unsigned int dj)
{
unsigned int new_matrix[n * n];
// Копируем матрицу в массив меньшего размера
{
unsigned int *src = pm;
unsigned int *dest = new_matrix;
for (unsigned int i = 0; i <= n; i++)
{
if (i == di)
{
src += n + 1;
continue;
}
for (unsigned int j = 0; j <= n; j++)
{
if (j == dj)
{
src++;
continue;
}
*dest++ = *src++;
}
}
}
if (n > 3)
{
// Запрещаем переходы в уже пройденные узлы графа.
// Чтобы избежать подциклы в векторе найденых рёбер ищем голову и хвост цепочек,
// вместе с которыми добавленное ребро образует единую ветвь.
// Для найденый индексов в матрице меньшего размера ищем обратные индексы
unsigned int i = head_search(new_matrix, m->v, n, index, m->v[index].dest);
unsigned int j = tail_search(new_matrix, m->v, n, index, m->v[index].src);
// Зануляем обратный элемент в матрице меньшего размера.
// Должен находиться всегда!!!
new_matrix[i * n + j] = inf;
}
else if (n == 2)
{
// Если в матрице остался только один элемент
new_matrix[0] += new_matrix[3];
// Если текущее решение лучшее из найденных, запоминаем его
if (new_matrix[0] < m->global_min)
{
m->global_min = new_matrix[0];
for (unsigned int i = 0; i <= index; i++)
{
m->v_best[i].src = m->v[i].src;
m->v_best[i].dest = m->v[i].dest;
}
//memcpy(m->v_best, m->v, (m->n-1) * sizeof(TVector));
m->v_best[index + 1].src = new_matrix[1 * n + 0];
m->v_best[index + 1].dest = new_matrix[0 * n + 1];
}
return;
}
// Производим раcчёт для слоя ниже
matrix_evaluation(m, new_matrix, index + 1, n);
}
//=======================================================================
void matrix_evaluation(struct TMatrixObj *m, unsigned int *pm, unsigned int index, unsigned int n)
{
unsigned int max_sum, max_i, max_j;
do
{
m->step++;
// Производим приведение матрицы, находим элемент для разбиения, и верхнюю оценку
matrix_reduction(pm, n, &max_sum, &max_i, &max_j);
// Если нет возможного пути, то блочим ветку
if (pm[0] >= inf)
return;
// Расчитываем множество М1
// Если лучший из найденых пока маршрутов больше нижней границы,
// то вычёркиваем текущую строку и столбец и переходим к уменьшиной матрице
if (m->global_min > pm[0])
{
// Сохраняем индексы элемента разбиения в вектор локального результата
m->v[index].src = pm[max_i * n + 0];
m->v[index].dest = pm[0 * n + max_j];
// Погружаемся на слой ниже
martix_in_depth(m, pm, n - 1, index, max_i, max_j);
}
// Расчитываем множество М2
// Исключаем пункт из множества
pm[max_i * n + max_j] = inf;
// Производим повторную оценку после вычерка вершины (множество М2)
// Так как хвостовая рекурсия дороже итерации, оформляем цикл
}
while (m->global_min >= pm[0] + max_sum);
}
//=======================================================================
#ifdef __cplusplus
extern "C" {
#endif
int tsp_branch(unsigned int n, int *p)
{
if ((n < 2) || (n > 64))
return 0;
struct TMatrixObj m;
m.n = n;
struct TVector v_best[n];
struct TVector v[n - 1];
m.v = v;
m.v_best = v_best;
unsigned int work_matrix[(n + 1) * (n + 1)];
//-----------------------------------------------------------------------
// Производим первичную инициализацию рабочей матрицы
m.global_min = inf;
m.step = 0;
work_matrix[0] = 0;
for (unsigned int i = 1; i < m.n + 1; i++)
{
work_matrix[i * (m.n + 1) + 0] = i;
work_matrix[0 * (m.n + 1) + i] = i;
}
{
int *src = p;
for (unsigned int i = 1; i < m.n + 1; i++)
for (unsigned int j = 1; j < m.n + 1; j++, src++)
if ((i != j)&&(*src >= 0))
work_matrix[i * (m.n + 1) + j] = *src;
else
work_matrix[i * (m.n + 1) + j] = inf;
}
//-----------------------------------------------------------------------
// Начинаем расчёт
matrix_evaluation(&m, work_matrix, 0, m.n + 1);
//-----------------------------------------------------------------------
// Вывод результата
if (m.global_min < inf)
{
p[0] = m.global_min;
p[1] = m.step;
unsigned int v_result[n];
for (unsigned int i = 0; i < n; i++)
{
v_result[v_best[i].src - 1] = v_best[i].dest;
}
unsigned int j = 0;
for (unsigned int i = 2; i < m.n + 1; i++)
{
p[i] = v_result[j] - 1;
j = v_result[j] - 1;
}
p[n + 1] = 0;
return n + 2;
}
else
{
return 0;
}
//-----------------------------------------------------------------------
}
#ifdef __cplusplus
}
#endifПример вызова на Python
from ctypes import *
import numpy as np
import random
import matplotlib.pyplot as plt
import networkx as nx
from datetime import datetime
#------------------------------------------------------------------------------------
def distance(x1, y1, x2, y2):
return ((x2 - x1) ** 2 + (y2 - y1) ** 2) ** 0.5
#------------------------------------------------------------------------------------
def tsp_branch(n, py_arr, lib):
if n < 2:
return {}
flatten_arr = list(np.concatenate(py_arr).flat)
l = [-1] * (n * n - len(flatten_arr))
flatten_arr = (flatten_arr + l)[:n * n:]
int_arr = (c_int * (n * n))(*flatten_arr)
res = lib.tsp_branch(n, byref(int_arr))
if res > 0:
l = list(int_arr)[:res:]
return {'len' : l.pop(0), 'steps' : l.pop(0), 'path' : l}
else:
return {}
#------------------------------------------------------------------------------------
lib_c = cdll.LoadLibrary(r"tsp_branch.dll")
lib_c.tsp_branch.argtypes = [c_int, c_void_p]
lib_c.tsp_branch.restype = c_int
#------------------------------------------------------------------------------------
INF = -1
#random.seed(1)
n = 26
v1 = []
points = {}
for i in range(n):
points[i] = (random.randint(1, 10000), random.randint(1, 10000))
input_matrix = []
for i, vi in points.items():
m1 = []
for j, vj in points.items():
if i == j:
m1.append(INF)
else:
m1.append(int(distance(vi[0], vi[1], vj[0], vj[1])))
v1.append([i, j, int(distance(vi[0], vi[1], vj[0], vj[1]))])
input_matrix.append(m1.copy())
plt.figure(figsize=(6, 6))
graph = nx.Graph()
graph.add_nodes_from(points)
# Добавляем дуги в граф
for i in v1:
graph.add_edge(i[0], i[1], weight=i[2])
#-----------------------------------------------------------------
start_time = datetime.now()
res1 = tsp_branch(n, input_matrix, lib_c)
print(datetime.now() - start_time)
print('min_len =', res1['len'], ', steps =', res1['steps'], res1['path'])
if 'path' in res1:
d1 = []
for i, v in enumerate(res1['path']):
d1.append([res1['path'][i-1], res1['path'][i]])
#-----------------------------------------------------------------
# Рисуем всё древо
nx.draw(graph, points, width=0.5, edge_color="#C0C0C0", with_labels=True)
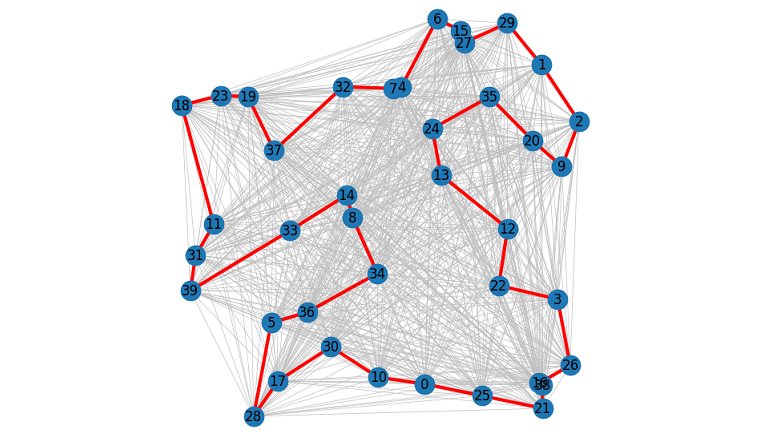
nx.draw(graph, points, width=3, edge_color="red", edgelist=d1, style="-")В отличие от детерминированного алгоритма динамического программирования, метод ветвей и границ является стохастическим, и время работы очень сильно варьируется от набора входных данных.
Была проведена серия испытаний на случайном наборе точек на плоскости для оценки производительности алгоритма от количества вершин графа. Каждая серия состояла из тысячи случайно сгенерированных наборов.
 от размера матрицы - логарифмическая шкала")
Графики были построены по 99, 98, 95 и 90 перцентилям от размера графа и времени в секундах. 99 перцентиль говорит о том, что мы найдём решение задачи в среднем в 99 случаях из ста, за указанное время для похожего набора входных данных.
Как вы можете заметить подход не панацея, но при определённых условиях даёт весьма неплохие результаты.
Как бонус алгоритм неплохо себя чувствует на не полно связанных матрицах (отсутствующие связи задаются как отрицательные числа или inf), а также на не симметричных матрицах. Последнее особо важно для задач транспортной логистики, где расстояние в точку доставки не равно обратному пути, из-за того, что дороги могут быть односторонними.

Теперь о минусах, хоть алгоритм переваривает абсолютно любые матрицы для поиска минимального решения, но на некоторых экземплярах делает это крайне неэффективно. Одним из примеров таких это задача коммивояжёра на максимум.

Задача коммивояжёра на максимум
import random
import matplotlib.pyplot as plt
import networkx as nx
import numpy as np
import copy
from ctypes import *
from datetime import datetime
#-----------------------------------------------------------------
def distance(x1, y1, x2, y2):
return ((x2 - x1) ** 2 + (y2 - y1) ** 2) ** 0.5
#-----------------------------------------------------------------
def tsp_branch(n, py_arr, lib):
if n < 2:
return {}
flatten_arr = list(np.concatenate(py_arr).flat)
l = [-1] * (n * n - len(flatten_arr))
flatten_arr = (flatten_arr + l)[:n * n:]
int_arr = (c_int * (n * n))(*flatten_arr)
res = lib.tsp_branch(n, byref(int_arr))
if res > 0:
l = list(int_arr)[:res:]
return {'len' : l.pop(0), 'steps' : l.pop(0), 'path' : l}
else:
return {}
#-----------------------------------------------------------------
#random.seed(1)
n = 7
INF = -1
#-----------------------------------------------------------------
v1 = []
points = {}
for i in range(n):
points[i] = (random.randint(1,1000), random.randint(1,1000))
input_matrix = []
for i, vi in points.items():
m1 = []
for j, vj in points.items():
if i==j:
m1.append(INF)
else:
m1.append(round(distance(vi[0], vi[1], vj[0], vj[1])))
v1.append([i,j,round(distance(vi[0], vi[1], vj[0], vj[1]))])
input_matrix.append(m1.copy())
#-----------------------------------------------------------------
lib = cdll.LoadLibrary(r"tsp_branch.dll")
lib.tsp_branch.argtypes = [c_int, c_void_p]
lib.tsp_branch.restype = c_int
plt.figure(figsize=(5, 5))
graph = nx.Graph()
graph.add_nodes_from(points)
# Добавляем дуги в граф
for i in v1:
graph.add_edge(i[0], i[1], weight=i[2])
#-----------------------------------------------------------------
# Задача коммивояжора на минимум
start_time = datetime.now()
res1 = tsp_branch(n, input_matrix, lib)
date_diff = (datetime.now() - start_time).total_seconds()
print(date_diff)
print(res1['len'], res1['steps'], res1['path'])
if 'path' in res1:
d1 = []
for i, v in enumerate(res1['path']):
d1.append([res1['path'][i-1], res1['path'][i]])
#-----------------------------------------------------------------
# Задача коммивояжора на максимум
input_matrix_max = copy.deepcopy(input_matrix)
for i in range(len(input_matrix_max)):
for j in range(len(input_matrix_max)):
if i != j:
input_matrix_max[i][j] = 1000 - input_matrix_max[i][j]
start_time = datetime.now()
res2 = tsp_branch(n, input_matrix_max, lib)
date_diff = (datetime.now() - start_time).total_seconds()
print(date_diff)
res2['len'] = 0
for i, val in enumerate(res2['path']):
res2['len'] += input_matrix[res2['path'][i-1]][res2['path'][i]]
print(res2['len'], res2['steps'], res2['path'])
if 'path' in res2:
d2 = []
for i, v in enumerate(res2['path']):
d2.append([res2['path'][i-1], res2['path'][i]])
# -----------------------------------------------------------------
nx.draw(graph, points, width=1, edge_color="#C0C0C0", with_labels=True)
nx.draw(graph, points, width=2, edge_color="blue", edgelist=d1, style="-")
nx.draw(graph, points, width=2, edge_color="red", edgelist=d2, style="-")Хоть я и обожаю Python, но для ресурсоёмких задач он не подходит совершенно, даже с numpy. Привожу пример ранней наивной реализации с использование pandas чисто в целях ознакомления для новичков, но возможно кого-то подвигнет на изучение.
Python
import pandas as pd
import numpy as np
import random
import matplotlib.pyplot as plt
import networkx as nx
import sys
if not sys.warnoptions:
import warnings
warnings.simplefilter("ignore")
pd.set_option('display.max_rows', 500)
pd.set_option('display.max_columns', 500)
pd.set_option('display.width', 1000)
#------------------------------------------------------------------------------------
def distance(x1, y1, x2, y2):
return ((x2 - x1) ** 2 + (y2 - y1) ** 2) ** 0.5
#------------------------------------------------------------------------------------
def in_deep_matrix(p, y, x):
# Возвращает новую матрицу меньшего размера, за вычитом строки и столбца
return p.drop([y], axis = 0).drop([x], axis = 1)
#------------------------------------------------------------------------------------
def reduction_matrix(p):
# Производим редуцирование матрицы, возвращаем нижнюю границу
bottom_line = 0
# Находим минимум по каждой строке и вычитаем его
for index, row in p.iterrows():
min = row.min()
if np.isinf(min):
return np.inf
bottom_line += min
for key, value in row.iteritems():
p[key][index] -= min
# Находим минимум по каждому столбцу и вычитаем его
for key, value in p.iteritems():
min = value.min()
if np.isinf(min):
return np.inf
bottom_line += min
for index, row in value.iteritems():
p[key][index] -= min
return bottom_line
#------------------------------------------------------------------------------------
def partition_matrix(p):
# Ищем элемент для разбиения матрицы на m1 и m2
# Для этого производим оценку нулевых элементов матрицы
max_sum = 0
index_i = None
index_j = None
for index, row in p.iterrows():
for key, value in p.iteritems():
if p[key][index] == 0:
min_i = np.inf
min_j = np.inf
for k, v in p[key].items(): # по столбецу
if k != index and v < min_i:
min_i = v
for k, v in p.loc[index].items():
if k != key and v < min_j:
min_j = v
l = min_i + min_j
if l > max_sum:
max_sum = l
index_i = index
index_j = key
return [index_i, index_j, max_sum]
#------------------------------------------------------------------------------------
def reverse_index(l, i, j):
# Находим обрытный индекс для матрицы
def in_dict(d, v):
while v in d:
v = d[v]
return v
ln = len(l)
d1 = {l[k][0]: l[k][1] for k in range(0, ln, 1)}
d2 = {l[k][1]: l[k][0] for k in range(0, ln, 1)}
return [in_dict(d1, i), in_dict(d2, j)]
#------------------------------------------------------------------------------------
def evaluation_matrix(p, res, bottom_line):
# Оценка матрицы, поиск решения
if len(p) == 1:
res['steps'] += 1
bottom_line += p.iat[0, 0]
# Если текущее решение лучше, запоминаем его
if bottom_line < res['global_min']:
res['global_min'] = bottom_line
res['local_result'].append([p.index[0], p.columns[0]])
res['best_result'] = res['local_result'].copy()
print('Решение лучше:', bottom_line, res['best_result'], 'шаг: ', res['steps'])
return
# Производим редуцирование матрицы, возвращаем минимальную нижнюю границу
bottom_line += reduction_matrix(p)
if np.isinf(bottom_line):
return
max_sum = 0
while True:
res['steps'] += 1
# Находим элемент для разбиения на подмножества m1 и m2
i, j, max_sum = partition_matrix(p)
# Больше нет элементов для разбиения
if i is None:
return
v_len = len(res['local_result'])
# Рассматриваем m1 (соглашаемся на разбиение по элементу)
if bottom_line < res['global_min']:
res['local_result'].append([i, j])
p1 = in_deep_matrix(p, i, j)
# Вычёркиваем обратный элемент только для матрицы большей чем 2х2, чтоб не получить inf
if len(p1) > 2:
i_reverse, j_reverse = reverse_index(res['local_result'], i, j)
p1[j_reverse][i_reverse] = np.inf
evaluation_matrix(p1, res, bottom_line)
# Рассматриваем m2
if res['global_min'] < bottom_line + max_sum:
return
p[j][i] = np.inf # Исключаем не выбранный элемент
res['local_result'] = res['local_result'][:v_len] # Обрезаем список пути
#------------------------------------------------------------------------------------
def return_res(res):
l = res['best_result']
if l:
d = {l[k][0]: l[k][1] for k in range(len(l))}
li =[]
a = l[0][0]
for v in range(len(l)):
li.append(a)
a = d[a]
return li
else:
return []
#------------------------------------------------------------------------------------
#random.seed(1)
n = 13
v1 = []
points = {}
for i in range(n):
points[i] = (random.randint(1,1000), random.randint(1,1000))
input_matrix = []
for i, vi in points.items():
m1 = []
for j, vj in points.items():
if i==j:
m1.append(np.inf)
else:
m1.append(int(distance(vi[0], vi[1], vj[0], vj[1])))
v1.append([i,j,int(distance(vi[0], vi[1], vj[0], vj[1]))])
input_matrix.append(m1.copy())
plt.figure(figsize=(6, 6))
graph = nx.Graph()
graph.add_nodes_from(points)
# Добавляем дуги в граф
for i in v1:
graph.add_edge(i[0], i[1], weight=i[2])
f1 = pd.DataFrame(input_matrix)
print(f1)
# Инициализация массива решений
res = {'global_min':np.inf, 'best_result': [], 'local_result':[], 'steps':0}
# Запуск нахождения решения
evaluation_matrix(f1, res, 0)
print('Результат:', res['global_min'], return_res(res), 'всего шагов:', res['steps'])
# Рисуем всё древо
nx.draw(graph, points, width=1, edge_color="#C0C0C0")
# Рисуем оптимальный путь
nx.draw_networkx(graph, points, with_labels=True, edgelist=res['best_result'], arrows=True, edge_color="blue", width=5)Я работал над данным алгоритмом более трёх лет наездами. Проект, для которого предназначался этот алгоритм, остался в далёком прошлом, но мне думается, что общественности будут любопытны мои наработки на данном поприще.
Буду раз откликам, замечаниям, предложениям, возражениям.
Код, приведённый к статье, разработан вашим покорным слугой и может быть использован вами под лицензией GNU GPL.
P.S. C Наступающим Новым годом!
Комментарии (41)

thevlad
27.12.2022 23:20+5Оставлю для интересующихся SOTA.
https://en.m.wikipedia.org/wiki/Concorde_TSP_Solver
Решает инстансы до несколько десятков тысяч вершин.
Под капотом integer programming подход с branch and cut.

rebuilder Автор
28.12.2022 07:02Если я правильно понимаю, подход применим только для симметричной задачи и только на плоскости. Я же предлагаю решать в общем виде. Хотя да результаты интересные.
thevlad
28.12.2022 11:40Да симметричный, но есть трюк с конвертацией асимметричной в симметричную. Не только на плоскости, веса не должны удовлетворять неравенство треугольника.

domix32
28.12.2022 12:18неравенство треугольника
Это то которое a+b ≤ c ?
thevlad
28.12.2022 12:45Скорее D(a, b) <= D(a, c) + D(b, c)
https://en.wikipedia.org/wiki/Travelling_salesman_problem#Metric
domix32
28.12.2022 20:37Это ровно то же самое. Просто в вашем случае a,b,c это вершины, а в моем - посчитанные ребра.
rebuilder Автор
30.12.2022 10:29Почитал подробнее, это прорывной метод для огромных матриц с заранее известной метрикой пространства, я в восхищении!
Забавно, что в нём так же используется алгоритм ветвления и границ, для выбора лучшего решения.
thevlad
30.12.2022 13:08На самом деле формулировка через integer programming позволяет решать многие задачи дискретной оптимизации в том числе и NP так, что это довольно стандартный и старый подход. Но дьявол как обычно в деталях реализации.

Slav2
28.12.2022 04:57+2Если у нас не каждый город имеет соединение с другим городом напрямую, а расстояние между городами непосредственно связанными между собой одинаковое (1 прыжок), мы сможем воспользоваться этим методом?
rebuilder Автор
28.12.2022 06:54Да, конечно сможет, но хоть один путь через вершину должен существовать иначе расчёт не имеет смысла. Когда нет прямой связи между городами в задающей матрице смежности элементу входящему в вершину и исходящему из неё нужно поставить -1.

vadimr
28.12.2022 07:25+2Вы проводили оценки эффективности своих оптимизаций? Избавление от рекурсии не выглядит чем-то эффективным. Особенно по сравнению с постоянными выделениями и освобождениями памяти, которых как раз можно было бы избежать, перемещаясь по статическим массивам.
rebuilder Автор
28.12.2022 09:41Эффект есть, и довольно значительный, иначе не было бы смысла об этом писать. Конкретные значения я не приведу, это требует отдельного обзора. Избавление от рекурсии как таковой не самоцель, это требуется для того чтоб не хранить отдельные матрицы на каждом шаге ветвления.
Очень грубый пример: матрица 32х32 требует в среднем где-то 10млн рабочих шагов, возьмём за среднее значение хранимой матрицы шага как 20х20 ~ 1кб. Получается нам нужно хранить в памяти более 9 ГБ информации. А если матрица ещё больше?
vadimr
28.12.2022 11:13+2Дублирование данных вообще никак не связано с рекурсией.
rebuilder Автор
28.12.2022 11:35Я возможно вас не совсем правильно понимаю, поясните свою мысль.
Я имел в виду рекурсию в широком смысле, как возможность не вызывать функцию дополнительный раз, когда нужно передавать что-то в виде параметров, которые будут хранится в стеке.
При стандартном алгоритме ветвей и границ мы в любом случае обязаны хранить обе ветви на каждом ветвлении. В моём варианте мы копируем только одну ветвь, а вторую обходим итеративно в цикле не выделяя память отдельно.
vadimr
28.12.2022 11:48+5Тут надо начать с того, что хвостовая рекурсия алгоритмически строго эквивалентна циклу, это просто способ записи управляющих конструкций. Некоторые компиляторы прямо преобразуют хвостовую рекурсию в цикл.
А писал я выше о том, что выделение памяти вообще с рекурсией никак не связано. Вы можете весь свой алгоритм переписать на статических переменных и вообще не выделять память, в том числе и в рекурсивных функциях. И экономить вам надо выделения и освобождения памяти, а не рекурсивные вызовы, которые сами по себе – просто передача управления. А на стеке в таком случае будут передаваться просто индексы в массивах.

Andriljo
28.12.2022 09:29+1Метод ветвей и границ не является точным тк его скорость и качество зависят от размерности задачи. Говорить что метод ветвей и границ решает NP problem задачи, значит говорить о том, что они соответствуют P problem и все эти квантовые отжиги и тп не нужны. Генетика и пр метаэвристики тоже решают задачи NP до определленой размерности К числа городов точно, но потом находят приближённое к оптимальному решению, но гораздо быстрее чем ветви и границы.
rebuilder Автор
28.12.2022 10:17+1Вы не правы, метод ветвей и границ с полным перебором — это точный метод. Другое дело что его практически всегда используют с эвристиками, значительно уменьшающими число вычислений, но тогда да алгоритм перестаёт быть точным.

wataru
28.12.2022 14:43Зависит от эвристик. Иногда они не ломают точность метода. Можно, например, выходить из ветви, если оценка снизу скажет, что все равно получится не лучше оптимального решения. Если же оценка снизу не строгая, то — да, есть шанс потерять оптимальное решение.
rebuilder Автор
28.12.2022 14:53Можно, например, выходить из ветви, если оценка снизу скажет, что все равно получится не лучше оптимального решения
Так тут и используется этот подход, но это не является эвристикой.
wataru
28.12.2022 15:01Ну так оценку можно по разному делать. Вот тут и есть пространство для всяких эвристик.
rebuilder Автор
28.12.2022 15:09Ну какие могут быть эвристики в точном решении? Эта реализация как раз и создавалась для поиска точного решения максимально быстро. Для эвристики существуют другие более выигрышные подходы.
wataru
28.12.2022 15:28Допустим города на плоскости. Тогда можно выходить, если минимальное расстояние, нужное для замыкания всех висячих концов сделает текущее решение хуже известного лучшего (высчитанное как тупо эвклидово расстояние, не смотря на то, какие ребра там есть). При чем не факт, что именно с такой стоимостью вы сможете все замкнуть, да и вообще у вас будет один большой цикл в конце, а не куча мелких. Эта эвристика считается легко, в некоторых случаях может ускорить решение, но при этом не ломает поиск точного решения.
Вот это вот вычисление оценки через эвклидовы расстояния и есть эвристика, в моем понимании. Оно не ищиет минимальное требуемое расстояние для замыкания цикла точно — это было бы полноценное решение задачи коммивояжора. Оно делает лишь какую-то грубую оценку, забивая на все подряд, лишь бы просто считалось. Но, поскольку эта оценка снизу, то метод ветвей и границ все еще находит оптимальное решение.
rebuilder Автор
28.12.2022 15:55Допустим города на плоскости
Тут не всё так однозначно, для плоскости есть более эффективные решения. А где гарантия что задающие вершины располагаются не в трёхмерном пространстве, n- мерном, или расчёт строения белков. Мне хотелось создать универсальный алгоритм.
оценки через эвклидовы расстояния
Над этим нужно думать.
Пробовал играться с минимальными остовыми деревьями как барьерами на плоскости, для уменьшения числа расчётов. Но и там есть исключения, не стал добавлять в текст, ибо остались вопросы.
wataru
28.12.2022 16:13Чем более конкретная задача, тем лучше работают эвристики. Но можно придумать и что-то совсем общее. Например, брать для каждой висячей вершины мнимальное исходящее ребро (даже если оно замыкает мелкий цикл). Работать это будет не так эффективно, как пример выше.
Но неважно. Оценка эвристическая? Да. Метод все еще точный? Да.
А вообще, есть и общие алгоритмы основанные на эвристиках фактически. Намриер A*. Там надо иметь некоторые оценки оставшегося пути снизу. А уж как их считать — это уже в алгоритме не указано. Но эти оценки всегда будут эвристическими, ведь точно оставшееся расстояние не подсчитать.
Вы поймите, я тут не критикую вашу реализацию, а лишь спорю с вашим утверждением, что эвристики взаимосиключительны с алгоритмами, ищущими точное решение.
thevlad
28.12.2022 11:45+1NP задачи очевидно решаются брутфорсом имеющим в худшем случаи экспоненциальную сложность. То что брутфорс оптимизирован и решает какие-то реальные инстансы гораздо быстрее, с теоретической точки зрения ничего не значит и не делает его принадлежащим P.

MentalBlood
28.12.2022 09:56Но так ли важно качество кода, если он медленный?
Примерно такой же вопрос задают авторы Pony
domix32
28.12.2022 12:09unsigned int l = 0;проклято.
unsigned int line_cache[n + 1];я правильно понял, что кэши хранят первым элементом сумму строки/столбца?
Вообще, есть ощущение, что сишный алгоритм можно ещё поускорять, т.к. вроде некоторые куски имеют достаточно четкие ограничения для распараллеливания.
А суперперестановки пробовали генерировать?
rebuilder Автор
28.12.2022 12:22Про проклятие не уловил, можно подробнее?
Кэши хранят в [i] - элементе минимум2 по [i] строке.
line_cache[0] - нулевой элемент не используется, так как нулевая строка матрицы содержит индексы. Мне думается что в этом нагруженном куске делать пересчёт индекса на – 1 на каждом элементе цикла хуже неиспользуемых 4 байт.

Deosis
28.12.2022 14:17+1Если не хотите ходить по полю с граблями, не стоит использовать для имен переменных l и o
domix32
28.12.2022 20:55+2Про проклятие не уловил, можно подробнее?
однобуквенная переменная, об имени которой сложно догадаться, да ещё и L.
l1Il1IlI1- поди угадай кто есть кто.
rebuilder Автор
28.12.2022 12:36Алгоритм можно ещё ускорить тут вы правы.
Чем тут помогут суперперестановки?
А вот тут +1 и вправду лишнее:
unsigned int line_cache[n + 1];domix32
28.12.2022 20:50Суперперестановки это уже про применение коммивояжера, а не про оптимизацию вашего алгоритма. Задача генерации последовательности суперперестановок сводилось к задаче коммивояжёра (wiki). Правда, в постановке статьи упоминается эвристический алгоритм и ассиметричный случай TSP. Потому и спросил - пробовали ли написать что-то подобное для вашего решателя.

Dionisvl
28.12.2022 17:42Муравьи как роевой интеллект и эмерджентная система решают задачу коммивояжера на раз-два. Хотелось бы увидеть сравнение эффективности таких систем в подобной статье.
rebuilder Автор
28.12.2022 17:55Основная проблема муравьиного алгоритма и других эвристических методов не в том, чтоб найти решении быстро, а в том, чтобы доказать, что оно лучшее из возможных. Хотя данное конкретное решение и может являться лучшим.
rebuilder Автор
28.12.2022 19:42Ещё добавлю пять копеек к вопросу эвристик. Для симметричной версии задачи на плоскости можно несколько сократить число расчётов убрав заведомо неоптимальные связи. Например, построив для графа минимальное остовое древо, ветви которого будут своеобразными стенами, отсекающими части графа.
Это простая идея может в некоторых случаях сильно ускорить расчёт, но и она не идеальна. Вот пример того, когда эвристика не позволяет найти оптимальное решение.

Синим пунктиром - фактический минимальный путь (длина 4796)")
Зелёным цветом - минимальное остовое древо Красным - минимальный путь с учётом стен из ветвей остова (длина 4799) Синим пунктиром - фактический минимальный путь (длина 4796) Ну да время сократили, но это не минимальное решение.
Код
# Генерация случайного массива и сравнение у метода ветвей и границ с остовным беревом и без import random import matplotlib.pyplot as plt import networkx as nx import math as mt import numpy as np from ctypes import * from datetime import datetime import json #----------------------------------------------------------------- def distance(x1, y1, x2, y2): return mt.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2) #----------------------------------------------------------------- def Intersection(ax1, ay1, ax2, ay2, bx1, by1, bx2, by2): v1 = (bx2 - bx1) * (ay1 - by1) - (by2 - by1) * (ax1 - bx1) v2 = (bx2 - bx1) * (ay2 - by1) - (by2 - by1) * (ax2 - bx1) v3 = (ax2 - ax1) * (by1 - ay1) - (ay2 - ay1) * (bx1 - ax1) v4 = (ax2 - ax1) * (by2 - ay1) - (ay2 - ay1) * (bx2 - ax1) if (v1 * v2 < 0) and (v3 * v4 < 0): return True else: return False #----------------------------------------------------------------- def tsp_branch(n, py_arr, lib): if n < 2: return {} flatten_arr = list(np.concatenate(py_arr).flat) l = [-1] * (n * n - len(flatten_arr)) flatten_arr = (flatten_arr + l)[:n * n:] int_arr = (c_int * (n * n))(*flatten_arr) res = lib.tsp_branch(n, byref(int_arr)) if res > 0: l = list(int_arr)[:res:] return {'len' : l.pop(0), 'steps' : l.pop(0), 'path' : l} else: return {} #----------------------------------------------------------------- random.seed(40) n = 35 INF = -1 #----------------------------------------------------------------- v1 = [] points = {} for i in range(n): points[i] = (random.randint(1,1000), random.randint(1,1000)) input_matrix = [] for i, vi in points.items(): m1 = [] for j, vj in points.items(): if i==j: m1.append(INF) else: m1.append(round(distance(vi[0], vi[1], vj[0], vj[1]))) v1.append([i,j,round(distance(vi[0], vi[1], vj[0], vj[1]))]) input_matrix.append(m1.copy()) #----------------------------------------------------------------- lib_c = cdll.LoadLibrary(r"tsp_branch.dll") lib_c.tsp_branch.argtypes = [c_int, c_void_p] lib_c.tsp_branch.restype = c_int #----------------------------------------------------------------- start_time = datetime.now() res1 = tsp_branch(n, input_matrix, lib_c) date_diff = (datetime.now() - start_time).total_seconds() print(date_diff) print('Без остова:', res1['len'], res1['steps'], res1['path']) if 'path' in res1: d1 = [] for i, v in enumerate(res1['path']): d1.append([res1['path'][i-1], res1['path'][i]]) #----------------------------------------------------------------- plt.figure(figsize=(5, 5)) graph = nx.Graph() graph.add_nodes_from(points) # Добавляем дуги в граф for i in v1: graph.add_edge(i[0], i[1], weight=i[2]) mst = nx.minimum_spanning_tree(graph) d2 = mst.edges() for k in mst.edges(): for i in range(len(points)): for j in range(len(points)): if (i < j) and (k[0] != i) and (k[0] != j) and (k[1] != i) and (k[1] != j): if Intersection(points[k[0]][0], points[k[0]][1], points[k[1]][0], points[k[1]][1], points[i][0], points[i][1], points[j][0], points[j][1]): input_matrix[i][j] = INF input_matrix[j][i] = INF # Убираем удалённые рёбра в оригинальном графе if graph.has_edge(i, j): graph.remove_edge(i, j) start_time = datetime.now() res2 = tsp_branch(n, input_matrix, lib_c) date_diff = (datetime.now() - start_time).total_seconds() print(date_diff) print('С остовом:', res2['len'], res2['steps'], res2['path']) if 'path' in res2: d3 = [] for i, v in enumerate(res2['path']): d3.append([res2['path'][i-1], res2['path'][i]]) # ----------------------------------------------------------------- nx.draw(graph, points, width=1, edge_color="#C0C0C0", with_labels=True, node_size=200, font_size=10) nx.draw(graph, points, width=7, edge_color="green", edgelist=d2, style="-", node_size=0, alpha=1) nx.draw(graph, points, width=4, edge_color="red", edgelist=d3, style="-", node_size=0, alpha=1) nx.draw(graph, points, width=3, edge_color="blue", edgelist=d1, style=":", node_size=0)

Синим пунктиром - фактический минимальный путь (длина 4796)")

gchebanov
попробуйте numba, приятно удивитесь.
rebuilder Автор
JIT-компиляция в Python, вкусно. Спасибо за наводку, обязательно попробую.