

Успешный космический пуск привлекает мало внимания. Но если знать, что миссия по выведению Intelsat 31 находилась на волосок от гибели, становится гораздо интересней. По данным в открытом доступе можно вычислить, что произошло, и почему спутник все-таки был успешно выведен на нужную орбиту.
Хронология драмы
Первое смутное ощущение тревоги появилось, когда диктор, ведущий репортаж о пуске с интервалом в десять секунд, замолчал на целых сорок (с 1:56:00):
То, что диктор замолчал не просто так, стало ясно, когда появилась в открытом доступе телеметрия с участка работы второй ступени:
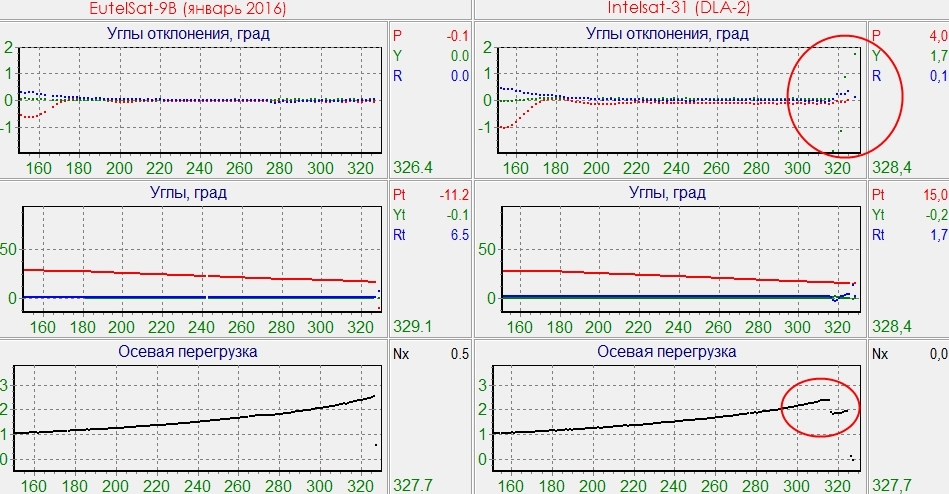
В районе 315 секунды упала тяга двигателей. Попробуем определить, что же случилось. На второй ступени стоят четыре двигателя (3 РД-0210 и РД-0211). Они практически одинаковые по конструкции, разве что у РД-0211 есть дополнительный теплообменник для наддува баков. Суммарная тяга четырех двигателей составляет 2400 килоньютонов. Силой сопротивления воздуха мы пренебрегли, потому что разделение второй и третьей ступени происходит на высоте примерно 80 км, где атмосферы уже практически нет.
Тут была ошибка в физике и расчетах
Перегрузка 1.8-2 g, по сравнению с нормальной на этом участке 2,5 g означает, что тяга упала примерно на четверть.
Вывод: Один двигатель потерял тягу и был отключен. Также эта версия подтверждается нарастанием углов отклонения — двигатель, расположенный по диагонали от вышедшего из строя, стал разворачивать ракету:

К счастью, на второй ступени все четыре двигателя находятся в карданных подвесах, и система управления стала бороться за жизнь ракеты, компенсируя разворачивающий момент поворотом двигателей. Это удавалось не вполне, углы отклонения росли, но, к счастью, до разделения оставалось меньше десяти секунд, и вторая ступень не успела уйти в сторону настолько, чтобы аварийно прекратить полет.
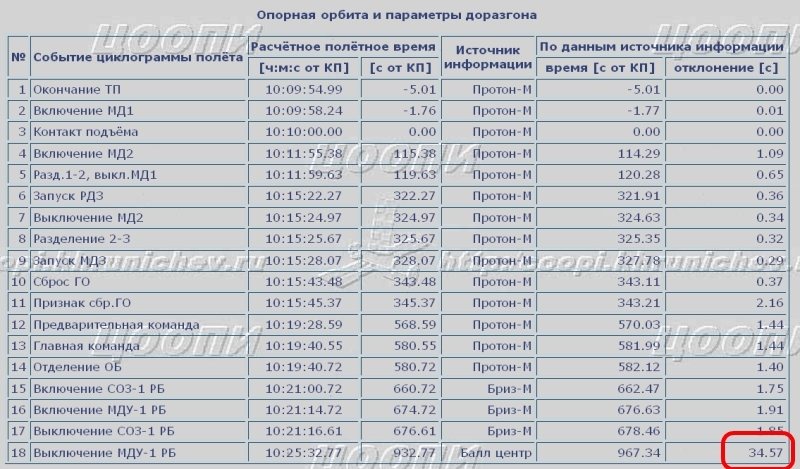
Но расслабляться было рано. Ракета-носитель «Протон-М» из-за аварии на второй ступени недодала связке разгонного блока «Бриз-М» и спутника 28,2 м/с.

Известно, что три ступени «Протона-М» выводят разгонный блок и полезную нагрузку на незамкнутую траекторию. Если «Бриз-М» не справится с нехваткой скорости, то разгонный блок и дорогой спутник окажутся в Тихом океане. «Бризу» пришлось нелегко — сравнительно маломощный двигатель тягой 2 тонны вытаскивал на опорную орбиту связку массой примерно 26 тонн дополнительные 35 секунд.
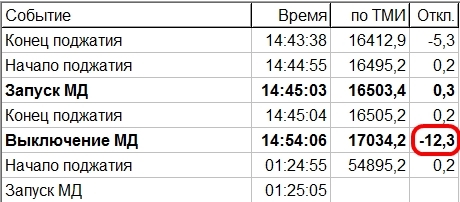
Несмотря на то, что выведение на опорную орбиту было успешным, опасность все еще не миновала. Дополнительный расход топлива означал, что его может не хватить на последующие маневры. И спутник, оказавшийся на неподходящей траектории, был бы вынужден тратить топливо, сокращая свой срок существования на целевой геостационарной орбите. Но и тут «Бриз-М» показал себя с отличной стороны — двигатель работал более эффективно, чем от него в среднем ожидалось (в реальной жизни ракетный двигатель показывает немного отличающиеся от расчетных характеристики, поэтому при планировании миссии на этот разброс также берут так называемый гарантийный запас топлива). Поэтому двигатель на последующих включениях выключался раньше:

В итоге, спустя 15 часов, «Бриз-М» успешно вывел спутник Intelsat 31 на суперсинхронную орбиту 3428х64964 км с наклонением 29.53° с ошибкой всего 1,1 м/с.
А причем тут компьютеры?
Возможность исправить нехватку скорости из-за аварии есть благодаря цифровым системам управления. Они работают в режиме терминального управления (terminal guidance) и, в отличие от следования жесткому алгоритму «на такой-то секунде повернуть на такой-то угол», анализируют данные с датчиков ускорений и угловых скоростей, формируя на ходу управляющие воздействия для того, чтобы выйти на нужную траекторию. Самый известный случай такого управления — выключение двух из пяти двигателей на второй ступени ракеты-носителя Saturn-V в беспилотной испытательной миссии «Аполлон-6». Тогда система управления сумела удержать управляемый полет ракеты и вывести ее на орбиту. В 1971 году при выведении «Аполлона-13» аварийно отключился один из пяти двигателей второй ступени «Сатурна-V», что никак не повлияло на миссию. В 2012 году разрушился один из девяти двигателей первой ступени Falcon 9, ракета успешно вышла на орбиту и доставила к МКС грузовой корабль Dragon, но попутная полезная нагрузка была потеряна. В 2016 году раньше, чем нужно, выключился двигатель первой ступени Atlas-V, вторая ступень смогла скомпенсировать нехватку скорости, и грузовой корабль Cygnus успешно долетел до МКС.
Успешная авария
Да, конечно, необходимо расследовать причину аварии и принять меры, чтобы она не повторилась. Но авария, которая не привела к провалу миссии и потере полезной нагрузки — это скорее победа техники и людей, ее создавших.
Небольшое объявление: 16 июня, в 19:00 в музее советского быта (Гостиный двор, г. Уфа) будет моя лекция «Женщины и космос». Вход 100 р.
Комментарии (101)

nerudo
14.06.2016 09:08Системы с обратной связью были придуманы как бы сильно раньше [промышленного] цифрового компьютера.

lozga
14.06.2016 09:27+6А это более сложно, чем обратная связь. Тут траекторию строить надо.
Vasyutka
14.06.2016 11:15А чем обратная связь по траектории не обратная связь ))
lozga
14.06.2016 12:20+3Терминальное наведение включает в себя обратную связь. А обратная связь может быть гораздо проще терминального наведения. Это как круиз-контроль и автопилот.
Vasyutka
14.06.2016 12:48я лишь поддержал nerudo, что действительно и траекторию можно построить аналоговыми схемами. Например, по магнитному полю, по (ну например) солнцу. И во времена аналоговой электроники все это делали с поразительной изобретательностью. Инженеры решали задачи теми средствами, которые были доступны. Хотя было сложнее. Сейчас то точно компьютер
lozga
14.06.2016 13:04А вы можете привести примеры аналоговой системы управления с терминальным наведением?
Vasyutka
14.06.2016 13:22например, ФАУ-1, вообще механическая: направление по гироскопам и дальность по набегающему воздуху. Формально можно рассматривать как терминальное наведение по дальности (если бы не ветер и косвенность измерения).
Потомок фау 1 Republic-Ford_JB-2 — не нашел точного описания, но сказано, что: радиокоманды + радар. В те года почти 100% это были аналоговые решения. Т.е. смотрим как летит по РЛС и отправляем команды лево-право-прилетели. Это уже абсолютно полноценная терминальная СУ (хоть и с внешним наблюдателем, т.к. GPS не было).
ну и я уверен много кто так целился в те времена аналоговым способом. накладываем на ЭЛТ карту местности, назначаем двумя вращ.ручками (одна за направление, другая за дальность) цель. А потом в полете смотрим по РЛС (или транспондер) и отправляем необходимые отклонения рулей по радио.lozga
14.06.2016 14:02+2Это не совсем те примеры. Я пытаюсь вспомнить историю космонавтики и не могу вспомнить таких возможностей у аналоговых систем. Да, они могли держать неустойчивое равновесие ракеты (и там нужна обратная связь), умели интегрировать скорость и выключать двигатель вовремя. Но вот умения выйти на нужную траекторию, компенсируя ошибки ступеней, я за ними не припомню.
Zenitchik
14.06.2016 16:38+2Вы не там видите проблему. Сам по себе компьютер тоже ничего не умеет. Умеет тот, кто написал программу и предусмотрел необходимое поведение в предусмотренных случаях. А раз можно написать программу, то ту же логику можно реализовать и аппаратно на любой элементной базе.
Дело не в замены аналога цифрой, а в расширении номенклатуры предусмотренных разработчиками нештатных ситуаций.
ProstoUser
14.06.2016 18:08+1Тут некоторая путаница в понятиях или в терминах.
Есть две классификации:
1. Как мы понимаем, что сейчас происходит с ракетой?
GPS — это примерно то же самое, что наблюдение за траекторией посредством РЛС. То есть внешний по отношению к ракете источник информации о текущем положении и скорости ракеты. Использование гироскопов, акселерометров и интеграторов — это инерциальная система, которая в таких внешних источниках информации не нуждается.
2. Как мы вырабатываем управляющее воздействие?
Вот тут как раз и бывает наведение по жесткой траекториии и «терминальное управление». В первом случае, как это и было довольно длительное время, перед стартом ракеты считается траектория, в СУ заводятся азимут, программа угла тангажа (для баллистической ракеты) и дальность. Тут уже не принципиально, будет ли это интеграл воздушной скорости измеренный «по набегающему воздуху», или кажущаяся скорость наинтегрированная гироскопом.
Так вот, система наведения «по жесткой траектории» измеряет текущие параметра движения, сравнивает их с программными и пытается управляющими воздействиями минимизировать отклонения реальных параметров от программных.
Система наведения с «терминальным управлением» определяет параметры движения ракеты и строит из вычисленной точки траекторию, которая оптимальным образом приводит к цели.
При этом не принципиально, каким образом получена информация о текущих параметрах движения ракеты. Это может быть GPS, а могут быть гироскопы и акселерометры (чисто инерциальная система). Главное — это то, что держит «в голове» система управления, когда вырабатывает управляющие воздействия.
Понимаете в чем разница? Если на ФАУ-1 налетит ураганный порыв ветра и мгновенно отнесет ее ровно на километр в сторону, то система управления «по жесткой траектории» поймет, что какое-то время ракету колбасило, но все равно полетит по заданному гироскопами азимуту по параллельной траектории и упадет ровно в километре сбоку от цели. Система с «терминальным управлением» поймет (по тем же гироскопам и акселерометрам), что ракету отнесло на километр в сторону и изменит «программный» азимут так, чтобы конец траектории пришелся в ту же точку, что и было изначально задумано. Для этого, конечно, придется чуточку увеличить дальность.
Если система управления «по жесткой траектории» сможет детектировать такой боковой снос и умеет с ним бороться, то она не станет корректировать исходно заданный азимут, а вместо этого будет пытаться вернуться на программную траекторию. То есть, грубо говоря, повернется под прямым углом к прежнему направлению полета и полетит в ту точку, откуда ее унесло.
Когда мы по РЛС смотрим куда летит ракета и по радио шлем ей команды, то это, конечно, терминальная система управления, но в виде оператора за пультом. То есть система управления не аналоговая, а «биологическая». Биологические системы управления (оператор или пилот) всегда терминальные. В этом их сила.Vasyutka
14.06.2016 18:26Да ну ничего не путаю! про ФАУ я и оговорился про ветер и про одну ось )). Но вот смотрите, налетит ураганный ветер на крылатую, управляемую по РЛС и радиокомандами. и ничего, вернет обратно (не на траекторию, а именно в точку попадания). И с помощью аналогового ПИД выправляем и продолжаем лететь на точку «дистанция, угол». А не пытаемся придерживаться траектории, а именно в точку. Это как разложить по компонентам. И вообще, это лишь вопрос представления измеряемых, оценивыемых и управляющего воздействия. Для одной постановки задачи — высота, для другой — точка назначения, для третьей — скорость. Математика останется одна и та же, как и возможность в былые времена решить ту или иную задачу аналоговыми схемами управления.
ProstoUser
15.06.2016 14:24Хорошо. Что такое ПИД? Это всего-лишь устройство, которое близким к оптимальному способу образом позволяет ликвидировать разницу между фактическим состоянием какого-то параметра и его заданным (или программным) значением. Что поступает на вход этого ПИД регулятора в качестве командного значения? Текущий угол тангажа — согласен! Текущая скорость — согласен! Текущий азимут — тоже согласен! Но это все будет управление по жесткой траектории.
Что подавать на вход ПИД регулятора, чтобы он приводил в заданную точку? Какое значение?
Я, собственно, сомневаюсь лишь в том, что на ФАУ была именно терминальная система наведения. Это слишком сложно для тогдашнего уровня развития техники. Даже через 20 лет после ФАУ ракеты все еще летали по жесткой траектории.Vasyutka
15.06.2016 14:45-1Вот например:
координаты x_цели y_цели изветсны, а у меня xcur,ycur (или в системе координат R,phi, не важно). беру прямо разницу, dx=x_цели — x_cur,dy= y_цели-ycur. Придумаю хитрющую схему, как сравнить dx и dy так, чтобы получить dx/dy. Вот мне уже известно отноешине Vx,Vy. И отправляю эти Vx,Vy в ПИД, их и поддерижваю.
ну не ахти прям как сложно, честно слово.
ProstoUser
15.06.2016 18:26Простите, но я все равно не понял, как это должно решить задачу наведения ракеты на цель.
Давайте прекратим этот бессмысленный спор.
Так или иначе, но очень долго, даже когда уже были технические возможности для терминального управления, ракеты управлялись по жестко заданной программе. Это просто исторический факт. Частично это, было обусловлено принципом «работает — не трогай», частично необходимостью заново делать все алгоритмы (тратить время и деньги на разработку, доводку и испытания).
Vasyutka
14.06.2016 18:36-1И почему биологическая? привести в точку — это не весть какая сложная задача даже для аналоговой СУ. В модуляцию радио-команд вставить аналоговый сигнал — управляеющее воздействие.
ProstoUser
15.06.2016 14:31Для аналоговой техники не сложно решить диф. уравнение напрямую — то есть по заданным начальным условиям и заданным управляющим воздействиям определить, куда упадет ракета. А вот по заданным начальным условиям вычислить управляющие воздействия, приводящие в нужную точку — это уже задача оптимизации. Особенно, если таких траекторий бесконечное множество.
Как передавать управляющий сигнал — это тоже не проблема. А биологическая система потому, что кто-то должен по сигналам РЛС решить, какие управляющие воздействия передать ракете. Если это оператор, то проблем нет. Если же аналоговый вычислитель, то попробуйте прикинуть, как он должен работать? Нарисуйте его блок-схему из интеграторов, дифференцирующих цепочек, сумматоров и т.п.Vasyutka
15.06.2016 14:40Оптимизационные задачи часто имеют довольно тривиальное строгое математическое решение, которые и аналоговыми методами можно выполнить. не нарисую, не умею
Zenitchik
15.06.2016 15:45>А вот по заданным начальным условиям вычислить управляющие воздействия, приводящие в нужную точку — это уже задача оптимизации. Особенно, если таких траекторий бесконечное множество.
Однако же в ПВО задача встречи ракеты с целью успешно решалась и решается в аналоговым счётно-решающим прибором.
>А биологическая система потому, что кто-то должен по сигналам РЛС решить, какие управляющие воздействия передать ракете. Если это оператор, то проблем нет. Если же аналоговый вычислитель, то попробуйте прикинуть, как он должен работать?
Вы всерьёз полагаете, что оператор умнее аналогового вычислителя?
>Нарисуйте его блок-схему из интеграторов, дифференцирующих цепочек, сумматоров и т.п.
Это не аргумент. С тем же успехом я могу предложить Вам написать программу решения этой задачи на любом удобном Вам языке.ProstoUser
15.06.2016 18:15В ПВО решается немного другая задача, насколько я понимаю. Если совсем грубо, то, наверное, примерно так: Есть положение цели на экране радара сейчас, есть положение секунду назад. Есть оценка расстояния сейчас и секунду назад. Дифференцируем расстояние, получаем скорость сближения. Делим расстояние на скорость сближения, получаем оценку времени до встречи. Интерполируем по двум точкам положение цели, умножаем на время до встречи, получаем точку встречи. После этого достаточно наводить ракету на эту точку. Можно вообще не париться и наводить ракету всегда точно на цель. Если скорость ракеты заметно больше скорости цели, все равно попадем, хоть и не по кратчайшему пути. Это как раз задача для аналогового вычислителя. Считаем, что цель должна быть в центре экрана радара и убираем отклонения.
Я не то что всерьез полагаю, я совершенно точно знаю, что аналоговые, да и цифровые вычислители значительно менее эффективны, чем опытный летчик. Когда-то очень давно, я имел некоторое касательство к отработке алгоритмов автоматической посадки одного летательного аппарата. Непосредственно этим не занимался, но коллеги рассказывали. Берется полетный симулятор, берется набор начальных условий типа высота, дальность, вектор скорости, ветер и т.п. Потом управление отдается автомату или живому пилоту. Так вот, пилот мог посадить аппарат в гораздо большем диапазоне начальных условий. В разы более широком.
Я не говорю, что надо делать готовую систему управления. Как надо писать такую программу «на любом языке», я по крайней мере представляю себе. И, наверное, с какими-то допущениями и упрощениями модели движения смогу написать даже в одиночку. А вот как то же самое сделать на аналоговом вычислителе, я даже в общих чертах себе не представляю. К тому же, не стоит забывать, что во времена разработки Протонов вычислительная техника была чуть менее развитой, чем сейчас. Тогда компьютер не дотягивающий по производительности до Ардуины занимал десятки кв. метров площади и требовал десятков киловатт электрической мощности.Zenitchik
15.06.2016 18:24В ПВО решается именно задача встречи ракеты с целью. Так она называется.
Алгоритм бывает разный. Но он всегда задан уравнением, которое преобразует измеренные параметры ошибки в управляющий сигнал. А при переходе параметров цели или ракеты через определённые условия, переключает алгоритм.
>Как надо писать такую программу «на любом языке», я по крайней мере представляю себе
Я Вам верю. А вот сам — не представляю. Ибо не писал никогда подобных программ. Просветите, меня, изложите схему алгоритма.ProstoUser
15.06.2016 18:48Я тоже подобных программ не писал. Но ведь все когда-то бывает в первый раз. :-)
Если мы все еще говорим про наведение на цель крылатой ракеты типа ФАУ-1, то схема простая.
Есть координаты цели, есть измеренные или вычисленные текущие координаты ракеты. Считаем азимут на цель и загружаем его в курсовой ПИД регулятор, который задает направление полета по внутреннему гироскопу. При этом держим заданную высоту полета.
Если расстояние до цели меньше чего-то, то включаем режим, в котором ракета летит прямо на цель.Zenitchik
15.06.2016 19:41Не вижу трудности в том, чтобы сделать то же самое на аналоговой технике.
Есть координаты цели, есть координаты, скорость и курс ракеты, рассчитывается азимут на цель, сравнивается с курсом ракеты, на ракету передаётся поправка, которую автопилот выполняет.
А если то же самое сделать по двум координатам, получится классическое радиокомандное наведение 1-го рода.ProstoUser
15.06.2016 20:42Наверное я плохо разбираюсь в аналоговой технике.
Не очень представляю, как там считать углы по теореме пифагора, да еще и на сфере.
Мои представления остались на уровне интергаторов. Если вы в курсе, как там можно посчитать азимут и какие устройства для этого используются, было бы интересно узнать.
Я, например, помню, что на древней ракете 8К84 программа угла тангажа была задана в виде формы кулачка, который часовым механизмом вращался и толкал шток, который в свою очередь крутил переменный резистор. А сопротивление этого резистора сравнивалось с сопротивлением другого переменного резистора, который стоял на одной из осей ГСП (кажется там был просто обычный мост), а напряжение из за рассогласования их сопротивлений было как раз тем сигналом, который система управления должна была держать равным нулю, поворачивая ракету по тангажу.Zenitchik
15.06.2016 20:50Аналоговая техника позволяет реализовать блок с любой зависимостью выходных сигналов от входных.
Если есть уравнение, то возможен и аналоговый прибор, который его реализует. А кулачки это, коноиды, ЭЛТ с неоднородно продырявленным экраном или что-то другое — вариантов тьма.
Eklykti
15.06.2016 20:59Угу, только каждый дополнительный параметр — это отдельный кусок схемы для его обработки. Как быстро вся схема превратится в мешанину проводов, в которой даже её авторы не смогут разобраться? А в цифровой системе всё вешается на центральный контроллер и обрабатывается софтово. Если мощности контроллера стало не хватать, ставим микросхему побольше, а основная часть софта осталась такая же.
Vasyutka
15.06.2016 21:14да как будто кто-то топит за анологовые решения ))). просто так делали при том уровне развития техники. Лет через 40ок будут также рассказывать про «это же лапша из кода, в котором даже ее авторы не могли разобраться!»
ProstoUser
15.06.2016 21:32Вполне возможно, что реализовать алгоритм терминального наведения можно и на аналоговом вычислителе. Хотя интересно, как там можно на кулачках, скажем, решить квадратное уравнение?
Возможно, проблема в весе и размерах такого вычислителя или в надежности его работы. А может быть просто не было смысла его делать, так как точность имеющихся датчиков была недостаточна, чтобы получить преимущество по сравнению с неведением по жесткой траектории.
Или другой вариант — решать надо было не какое-то одно уравнение, а итерационно подбирать решение, учитывая по ходу решения какие-то ограничения. Тоже вполне возможный вариант.
Zenitchik
15.06.2016 21:48Что значит «возможно»? ЗРК «Оса» до сих пор на вооружении. Без единой цифры на борту.
Влоб. Скажем, функция двух переменных на коноиде делается тривиально.
Представим уравнение в виде x^2+px+q =0;
Потом коноида реализует зависимость d = p^2-4q; кулачёк — реализует зависимость y = 0.5sqrt(abs(d));
Если d — неотрицательное, то корни равны 0,5p ± y, если d — отрицательное — то 0.5p и y — действительная и мнимая часть комплексных корней.
Ну, это даже не электроника, это я описал уровень 30-х годов. В 60-х для этого наверняка существовали спецлампы или ещё какие-то способы задания функций.
>Или другой вариант — решать надо было не какое-то одно уравнение, а итерационно подбирать решение, учитывая по ходу решения какие-то ограничения. Тоже вполне возможный вариант.
Опишите задачу.ProstoUser
16.06.2016 14:03Интегрируем уравнения движения, в результате получаем точку попадания. Меняем начальные условия, прогоняем уравнения движения еще раз, смотрим, ближе точка попадания к желаемой точке, или дальше. В соответствии с этим опять меняем начальные условия и т.д., чтобы в конечном итоге точка попадания совпала с желаемой.
Далеко не любое уравнение можно аналитически развернуть наоборот и из желаемой конечной точки получить требуемые начальные условия. А нелинейность коэффициентов диффура, насколько я понимаю (могу ошибаться), вообще делает невозможными даже мечты об аналитическом решении.Zenitchik
16.06.2016 14:39+1Реализуем уравнение. Помещаем прибор, его реализующий, в контур автоматического управления, управляющим сигналом у нас будут входные данные уравнения, измеряемым — выходные. Такой автомат установится в положении, соответствующем решению. В вопросе сходимости, конечно, будут подводные камни.

EugeneButrik
14.06.2016 11:14+4А почему за вторую ступень ракеты-носителя «отдувался» только разгонный блок? Третья ступень ракеты-носителя отработала всего-лишь на 1 секунду дольше расчётного времени. У третьей ступени нет возможности исправлять подобные «аварийные недоработки» второй — нет запаса по топливу, времени работы двигателя или на тот момент не хватает данных для выполнения такой корректировки?
Или корректировку делал разгонный блок по принципу «это его работа» (всякие там эффекты Оберта и прочее)?
Всё-таки, насколько я понимаю, при «начальных» ~26 тоннах, дополнительные 28 м/с для разгонного блока это не столько дополнительные 35 секунд работы двигателя (работает он там по несколько десятков минут) сколько «потеря» около двух дополнительных тонн топлива. По-моему, чтобы не допустить такого третья ступень тоже должна была работать допоследнего вздохапоследней капли топлива. Или она-таки тоже не прохлаждалась и также «боролась за жизнь».
Другими словами, тема подвига или предательства третьей ступени в детективе не раскрыта :)lozga
14.06.2016 12:21Мне кажется, что терминальное управление только на «Бризе». Хотя на форуме НК писали и про третью ступень.

trapwalker
14.06.2016 12:03А почему такие интересные подробности не были озвучены комментатором? Почему он говорил, что всё идёт в штатном режиме? Это странно. Мне кажется, что даже в случае полного провала миссии информативное и подробное освещение происходящего даст бОльший бонус, чем замалчивание. Всё равно придётся вести расследование и обнародовать какие-то результаты, однако ощущение контроля по сравнению с безысходностью неизвестности — это очень важно. ИМХО.
lozga
14.06.2016 12:24+8Потому что нужно время, чтобы разобраться, что случилось. Но идея поставить кого-нибудь из спортивных комментаторов на пуски ракет любопытная :)

Duduka
14.06.2016 12:58«Такой разног Нам не нужен!»? Нет, уж! не надо, но и комментарий не соответсвующий действительности тоже.
Kasatich
14.06.2016 14:16+3Э нет, вот еще. Наши балаболы-комментаторы отбивают всякое желание что-либо смотреть. Я даже трансляцию тех же ОИ смотрю только в иностранном варианте, потому что наши начинают бла-бла-бла за любой чих, переходя на шутеечки и веселые истории, видимо забывая о том, что они как бы трансляцию ведут, а не летс-плей на доту записывают. Такая же фигня с трансляцией евровидения — нашу версию смотреть невозможно из-за отечественных остряков.
mayorovp
14.06.2016 14:27+1Не надо так говорить про летс-плеи! Бла-бла-бла на любой чих мешает при их просмотре ничуть не меньше, чем в спорте.
Kasatich
14.06.2016 14:34+1Ну просто летс-плеи всякие бывают же. Бывают где реально игра идет, а бывают такие где чувак играет во что-то наподобие сапера и делает ход раз в 10 минут, а остальное время гогочет и читает сообщения от «фанатов»)) Хотя иностранцы тоже порой жгут. Я тут на выходных смотрел трансляцию с Е3, так ее комментировали два каких-то лба английских. Ну как комментировали. Наложили на 2\3 видеоряда картинку со своих вебкамер и о чем-то там хихикали. Я так и не просек — это трансляция Е3 с каментами или трансляция того как два чудака ржут над трансляцией Е3)
Mad__Max
14.06.2016 23:32В названии стрима "react" нигде не промелькнуло? А то в англоязычном сегменте довольно популярная категория, где главное это именно реакция комментирующих, а не само событие/трансляция. И именно ради этого их записывают и смотрят.

hdfan2
15.06.2016 06:45Видимо, как в том анекдоте про ценник в публичном доме: «Половой акт — $10, наблюдать за половым актом — $100, наблюдать за наблюдающим за половым актом — $1000».
spirtozaurus
14.06.2016 12:14Ещё когда смотрел прямую трансляцию, заметил странность: при отрыве видны какие-то обломки, спешно улетающие из шахты, (https://youtu.be/4MVW-OJcv8w?t=1h51m21s); в первые секунды полёта струя выхлопов чистая, но уже через 9 секунд в нижней части одного из боковых блоков видны следы NO2 (https://youtu.be/4MVW-OJcv8w?t=1h51m30s). Была мысль «вот пц...», но к счастью, обошлось
ЗЫ Понятное дело, что с дивана легко размышлять, но, кмк, может оказаться и правдойlozga
14.06.2016 12:27+2Эти обломки, похоже, детали старта и, думаю это нормально.
А вот след тетраоксида азота — это штатный дренаж, он при каждом пуске появляется.Zenitchik
14.06.2016 16:54Камера сгорания перед пуском продута окислителем. Протону так положено. Логично, что часть окислителя вылетает наружу не прореагировав.

Tim_23
14.06.2016 20:49+1Это куски брезента над каналами газохода, для защита днища РКН от отраженных ударных волн. Один из недостатков старта, ставший его особенностью)
castorg
14.06.2016 13:04Кстати, в недавнем (30.05.2016) запуске Союз-2.1б со спутником ГЛОНАСС-М, 3-я ступень тоже раньше на пару секунд раньше отключилась, и разгонному блоку «Фрегат» пришлось поработать за того парня, и компенсировать недостачу скорости.
tothefuture
14.06.2016 13:04+2Филипп, спасибо, ожидал от вас описание этого детектива.
Вы забыли упомянуть, существенную деталь: это первый полёт Протона/Бриза так называемой четвёртой фазы модернизации, в которой разными локальными мероприятиями грузоподъемность на ГПО доведена аж до 7 тонн (масса Intelsat-31 — 6450 кг, планируемого к запуску следующим EchoStar-21 — 6900). Возможно модернизация системы управления в течение этих четырёх фаз, всех и спасла.lozga
14.06.2016 13:10+2На форуме НК много спорили, что это за 4 фаза, я решил не писать тут. Надо будет поставить напоминалку на пуск EchoStar 21.
teecat
14.06.2016 14:29+1хм.
К счастью, на второй ступени все четыре двигателя находятся в карданных подвесах, и система управления стала бороться за жизнь ракеты, компенсируя разворачивающий момент поворотом двигателей. Это удавалось не вполне, углы отклонения росли…
По изучению в свое время на кафедре изделия 8к84/15а20 — оси ЖРД были не параллельны, а сводились в одну точку. Таким образом разворачивающего момента не было, а был увод, который легко компенсировать
Тут данная технология утеряна?
knstqq
14.06.2016 15:33А из-за свода в одну точку не падает сумарная мощность?
teecat
14.06.2016 16:36Там порядка градуса или полутора — давно было, не помню. Пренебрежимо исходя именно из повышения надежности
EugeneButrik
15.06.2016 01:39+1Когда-то давно, помню, читал в «Науке и Жизни» про то, что аналогичным образом слегка разворачивают оси турбореактивных двигателей на самолётах. Но там это делают для защиты хвостового оперения от реактивных струй, создаваемых двигателями. И там говорилось, что уровень снижения тяги мал настолько, что укладывается в погрешность её измерения.
lozga
14.06.2016 15:38Я не знаю конструкцию второй ступени, чтобы сказать точно, увод там был или разворот, но по данным телеметрии отклонения росли.
teecat
14.06.2016 16:38Отклонения конечно будут — увод. Тут вопрос какая возмущающая сила — зверский момент от нескомпенсированного движка или относительно небольшой увод
EugeneButrik
15.06.2016 01:28+1… оси ЖРД были не параллельны, а сводились в одну точку
Под точкой надо полагать центр тяжести всей движущейся конструкции? Другую точку, при выборе которой нескомпенсированные друг другом векторы тяги двигателей не будут создавать вращающего момента, представить сложно.
black_semargl
15.06.2016 10:26+1Центр тяжести у ракеты переменный, так что при всём желании не получится.
EugeneButrik
16.06.2016 08:26Согласен, ступил :)
Раз сказано, что оси двигателей изначально устанавливались, то значит эти двигатели не имели возможности поворота своих «осей», другими словами, не могли изменять вектор тяги, а значит и «отслеживать» изменяющийся центр тяжести тоже не могли.
Скорее всего уважаемый teecat говорил про технологии каких-то изделий, которые (опять-таки скорее всего) управлялись не изменением векторов тяги двигателей, что делает их сравнение с Протоном несколько некорректным. Все четыре маршевых двигателя второй ступени Протона могут независимо поворачивать свои оси (векторы тяги) в очень широком диапазоне и следовательно сводить их в очень широком диапазоне точек, а могут и вовсене копатьне сводить, но и не оставлять их параллельными друг другу (вариантов много).black_semargl
16.06.2016 09:25Не знаю как конкретно сделано на «Протоне», но иногда делают движки отклоняющиеся только по одной оси — перпендикулярно направлению на центр ракеты. Этого вполне достаточно для руления. Да и на первой ступени оно так.
EugeneButrik
16.06.2016 10:40Посыпаю голову пеплом, ступил второй раз :) Точных данных не нашёл, но по-моему на второй ступени Протона РД-0210 и РД-0211 также качаются лишь в одной плоскости и плоскость эта… «тангенциальна» (не уверен в правильности термина в отношении этой плоскости).
Не знаю с чем это связано, но, походу, ЖРД если качаются то, либо в двух плоскостях, либо лишь в тангенциальной плоскости. Возможно это как-то связано с взаимодействием газовых струй или ещё чего-либо в том же духе. Мне почему-то казалось логичным «качать» двигатель в радиальной плоскости, т.е. в одной плоскости с осью ракеты.
P.S. Вообще сложность поисков информации о подобных деталях поражает. Такое впечатление, что это до сих пор «страшная военная тайна, касающаяся межконтинентальной баллистической ракеты с ядерной боеголовкой». Ситуация похожа на:
— Гордитесь достижениями нашей космической промышленности! Гордитесь отечественной космической техникой — самой техничной техникой в мире.
— ОК, гордимся. А расскажите поподробнее об этих достижениях и об этой технике.
— А вот хрен вам. Верьте на слово и вообще гордитесь как есть. :)teecat
16.06.2016 10:49+1Вот соглашусь про источники. Мифов на которых строится презрение к (нужное подставить) — валом. А когда хочешь рассказать, что все совсем не так и куда как интереснее — ссылок на источники не найдешь либо в сети остались одни ссылки
black_semargl
16.06.2016 10:58+1Если качать в радиальной плоскости, то:
1) ничего не поделать с вращением ракеты
2) нужно большее расстояние между движками
Ну а для двух плоскостей — нужен более сложный и дорогой подвес.
Ну и трубы подвода компонентов очень хитро гнуть приходитсяEugeneButrik
16.06.2016 11:45Если качать в радиальной плоскости, то:
Да уж. Как-то я
1) ничего не поделать с вращением ракетыоб этом не подумалступил в третий раз :) При качании двигателей в одной плоскости (согласен, очевидная простота конструкции по сравнению с двумя плоскостями, а это и дешевизна и, что важнее, бо?льшая надёжность) альтернатив для тангенциального размещения этой плоскости нет. Управление по крену при помощи изменения вектора тяги иначе не получить.
Блин, тут физика подкладывает разработчикам системы управления немаленькую свинью, так как при качании камер в заранее установленной тангенциальной плоскости однозначно возникают вращающие моменты, которые к тому же очень сильно увеличиваются при отклонении от «нуля». И если существует разница в величине тяги двух противоположных «уравновешивающих» друг друга двигателей, то разница создаваемых ими разнознаковых моментов (действующих ещё и в динамически меняющихся плоскостях) может быть очень существенна. А когда разница величин тяги ещё и динамически меняется во времени? Это ж совсем разрыв мозга для системы управления, хоть «терминальной», хоть «нетерминальной».
Как эти чудо-люди делали так чтобы система управления корректно парировала весь этот бардак с моментами и не «расшатывала» ракету до её разрушения, да ещё и на аналоговых вычислительных устройствах — уму не постижимо.
teecat
16.06.2016 10:46+18к84/15а20 — это модификации УР-100 — баллистические ракеты КБ Челомея. На первой ступени там 4 ЖРД.
В корпусе первой супени 8С816 размещались: четыре маршевых ЖРД 15Д2 (РД-0217) с поворотными соплами
Посмотреть внешний вид можно здесь и здесь
Вот технического описания изделия в сети не вижу увы. Поэтому к сожалению ссылкой про сведение осей подтвердит не могу
teecat
15.06.2016 13:55+1Нет конечно. Точка выносится вперед, угол схождения осей не велик. Как нам объясняли, что если оси параллельны, то момент создает вся мощь ЖРД, а если сводится, то момент вменяемый и легко парируется — больше проблем составляет уже увод. Но тут конечно лучше представителей 6го факультета МАИ заслушать.
Сводить в точку внутри баков — очень большие потери тяги получатся, да и боковая составляющая нехилая в случае отказаEugeneButrik
16.06.2016 08:41Как нам объясняли, что если оси параллельны, то момент создает вся мощь ЖРД, а если сводится, то момент вменяемый и легко парируется — больше проблем составляет уже увод. Но тут конечно лучше представителей 6го факультета МАИ заслушать.
Не надо МАИ, хватит и строительного университета :) Это же элементарная механика: момент силы — это сила умноженная на плечо. В данном случае, сила — это тяга ЖРД, а плечо — это наименьшее расстояние от оси вектора этой тяги (оси двигателя) до центра тяжести ракеты.
Сводить в точку внутри баков — очень большие потери тяги получатся, да и боковая составляющая нехилая в случае отказа.
Другими словами, не убирали вращающие моменты совсем, а лишь минимизировали. Искали этакий компромисс между потерей тяги и величиной вращающего момента.

solariserj
14.06.2016 18:57>Самый известный случай такого управления
А известны неудачные попытки терминального управления, где программа поняла что была ошибка и пыталась исправить, но в итоге не получилось? Понятно, что перевернутый датчик система управления Протона тоже хотела компенсировать, но тут уже начальные данные были не верны.
Интересно моменты, где были приняты решения на основе измененной оценки ситуации по ходу действия.Vasyutka
14.06.2016 20:16несколько неудачных приземлений на платформу Маска? вполне «терминальная». видно было, что программа пыталась.

Jeffryxon
14.06.2016 20:39Подходящий пример, та же посадка миссии CRS-6 — система не смогла справиться с ракетой из-за нерасчётной реакции клапана управления тягой на её команды. На реддите была продолжительная и конструктивная дискуссия, смогла ли бы более продвинутая, нежели PID, система управления приспособиться к новым условиям и осилить посадку.
lozga
14.06.2016 20:48Я плохо представляю сценарий такой ошибки. Если отказал какой-нибудь датчик то система будет работать по другим, или данным с Земли, или скажет «ой, все» и никуда не полетит дальше. Какие-то отказы компенсировались перепрошивкой с Земли, но это не то. В известной истории с «Протоном» система управления какое-то время спасала ракету, опираясь на верные датчики углового положения (врали датчики угловой скорости). Но в какой-то момент их уже стало не хватать.
teecat
15.06.2016 14:15+1Кстати отключение двигателя может привести не только к разворачивающему моменту. Моделирование одной из катастроф Н-1:
в случае непрерывной цепочки ЖРД устойчивой (статически устойчивой) является, как выяснилось, конфигурация системы струй с винтовой симметрией (подобная Шуховской башне на Шаболовке), тогда как регулярно-симметричная конфигурация неустойчива. С другой стороны, в случае цепочки ЖРД с симметричными разрывами, связанными с не работающими ЖРД, картина оказалась противоположной:
регулярно симметричная структура устойчива, а винтовая — неустойчива. Таким образом, исчерпание запаса управляемости на Н-1 № 6л следует интерпретировать как следствие потери устойчивости в этом канале, но не самой ракеты, а системы струй ЖРД.
Источник — pdf по устойчивости ракет. Очень много интересного, но откуда взял — уже не помню
qbertych
15.06.2016 16:07О, это интересно. А вы не в курсе как в итоге решили проблему на следующей ракете? Она ведь летела стабильно и долго (пока ТНА не взорвался).
teecat
15.06.2016 16:15+1А это предположили недавно. Тогда был иной вариант. Там по книжке и причина закрытия проекта оригинальная — неустранимые колебания корпуса ракеты (и критика решения с этой точки зрения). Если интересно — в личку адрес на который скинуть книжку. Весьма рекомендую, хоть и не моя специальность
Апдейт. Нашел источник — http://www.iki.rssi.ru/books/2006rabinovich.pdf
mayorovp
15.06.2016 16:16Почему вы неудачные пуски называете катастрофами? Насколько я знаю, люди там не гибли — а значит, это были просто аварии.
teecat
15.06.2016 16:21Терминологически конечно не верно, но называть аварией событие такого масштаба разрушений (да хоть самого объекта) и стоимости потерь в деньгах язык не поворачивается

u007
18.06.2016 17:41Может быть, случай с Сатурном — и самый известный (хотя кто считал?), но примерно в то же время в Союзе пускали обновлённую версию «Зенита» с терминальным управлением, так вот там на второй ступени отключился единственный _маршевый_ двигатель. И система дотянула до заданной точки на рулевых, благо топливные баки у них общие. На пониженной тяге, автоматически пересчитав траекторию. Так что давайте будем патриотами, известный — не значит уникальный. В пыльных засекреченных архивах наверняка лежат ещё и не такие чудеса.
lozga
19.06.2016 15:00+1«Зенит», если вы про ракету, был в 80-х, а Сатурн — это конец 60-х. И я не говорил, что случай уникальный, он самый известный. А в не подбросите ссылку с описанием происшествия на «Зените»?
u007
19.06.2016 20:30+1Вот тут мельком упоминается http://www.famhist.ru/famhist/chertok/006c7bce.htm
А вообще эту историю, по-моему, нам в институте препод рассказывал, как пример.
MUTbKA98
Все же не хватает «интеллекта» системе управления — на этой второй ступени можно было бы принудительно отключить двигатель по диагонали от убитого, и дотянуть остальное полезную нагрузку до нужной скорости c минимальным отклонением по времени.
lozga
Правильнее было бы не выключить двигатель а снизить тягу до компенсируемого уровня. Но насколько я знаю, на ракете система управления попроще и она такого не умеет.
taviscaron
Хм. Выходит ошибка позиционирования (за счет разворота из-за нескомпенсированной тяги) дороже, чем нехватка скорости?
Ведь как я понял, основная проблема была в недостаче 28 м/с, а снизив тягу, получим меньшую скорость в итоге.
lozga
Пока мы не вышли на орбиту, не стоит терять тягу — есть риск упасть обратно.
taviscaron
Ну так и я так размышляю. Потеряно 2/3 с одного двигателя. Если скомпенсировать симметричный — снизим еще 2/3. в итоге теряем 4/3, т.е. на треть больше, чем просто выключив аварийный и подруливая изо всех сил.
lozga
Аварийный скорее всего выключили совсем, потому что неизвестно что с ним, и держать его включенным может быть опасно. Стоит подождать выводов аварийной комиссии, надеюсь их опубликуют.
Alex_fisch
Возможно я ошибаюсь, но вроде как тяга на маршевых двигателях ракеты-носителя не регулируется, по крайней мере не в таких широких пределах. Там, грубо говоря, просто вкл/выкл.
MichaelBorisov
Там есть дросселирование, емнип, обычно можно снизить тягу до 30% от номинала или около того. Особенно актуально для пилотируемых миссий, где ускорение ограничено переносимостью человека. По мере расхода топлива снижается масса ракеты, и одна и та же тяга двигателя дает большее ускорение ближе к концу работы ступени. Отсюда и необходимость дросселирования: вначале двигатель работает на номинале, а потом постепенно уменьшает тягу.
Alex_fisch
Но это же «Протон», а не «Союз»…
Погуглил по РД-0120:http://www.buran.ru/htm/11-3.htm
— допуск дросселирования тяги двигателя в диапазоне, % ......................45 -100;
teakettle
А диапазон регулировки тяги двигателя достаточно широк, чтобы его можно было компенсировать? Или он работает в режиме вкл/выкл без регулировки мощности?
lozga
Да, вы правы, не все двигатели могут дросселироваться в широком диапазоне.
ProstoUser
А до какого уровня этот двигатель позволяет снизить тягу?
Я могу что-то путать, но вроде бы у мощных двигателей, которые ставятся на носителях, возможности дросселирования тяги довольно ограничены.
Или у меня в голове устаревшие данные?
black_semargl
Если мы отключаем один двигатель — то остальные работают на 25%/3 = 8% дольше.
Если отключаем два — то на 50%/2 = 25% дольше
Каждая лишняя секунда полёта — потеря 9.8 м/с скорости, из-за притяжения земли.
lozga
Меньше 9,8, мы же не вертикально вверх летим.
u007
Я бы сказал, сильно меньше) Например, в районе геостационара — около 0,23
black_semargl
Ну тут скорей про косинус угла речь шла, но да, с высотой и сама сила меняется
dimaver
Немного не понял какие проценты и на что вы делите. Если двигателя 4 и мы отключаем 2, то остальные должны проработать в 2 раза дольше (за себя и за выключенный движок), а не на 25 %.
Zhmak
Скорость никак нельзя терять, так как спутник выводится на ГСО (а это значит, что его нужно не только поднять на высоту геосинхронной орбиты, а еще и нужно попасть в определенную позицию (градус) на этой орбите). Если я правильно понимаю, промах в данной ситуации означает что нужно будет сначала развить скорость больше расчетной, а потом еще и подтормаживать, на что у разгонного блока ресурсов могло и не хватить.
lozga
При выходе на ГСО, пока не подняли перицентр, можно спокойно выходить в нужную точку стояния.
Zhmak
После отработки трех ступеней, наклонение орбиты еще не скорректировано. Получается, что плоскости орбит и угловые скорости не совпадают. Я так понимаю, ожидание следующего «окна» для разгонного блока может занять неприлично много времени. Предположу (сидя на диване), что могут начаться проблемы с системами питания и термостатирования, если такая аварийная схема вывода не заложена проектировщиками.
Eklykti
Наклонение корректируется только в апоцентре, после трёх ступеней и разгонного блока туда ещё надо по инерции долететь, и только потом корректировать.