

Часть 1
Часть 2
В последней части я опишу все инструменты и техники для финальной сборки щупальцев. Как и обещалось, в посте присутствуют бонусы.
» Файлы-схемы.
1. Всемогущий список материалов
2. Векторные рисунки для лазерного резака.
a. Файлы DXF со сдвигом в 0,003 "
b. Оригинальные файлы DFX
3. STL-модели для 3D принтера
4. Оригинальные CAD-модели щупалец
5. Оригинальные CAD-модели контроллера
В зависимости от вашей цели, некоторые файлы окажутся важнее, чем другие. Если вы хотите просто изготовить части, вы можете сразу же вырезать, пользуясь файлами DXF со сдвигом, детали из листа нужной толщины, и приступить. Если вам надо что-то подправить в деталях, я приложил оригинальные DXF.
И когда у нас уже есть кучка новых деталей, давайте пройдёмся по последним шагам, необходимым для работы нашего детища: сборка и подстройка.

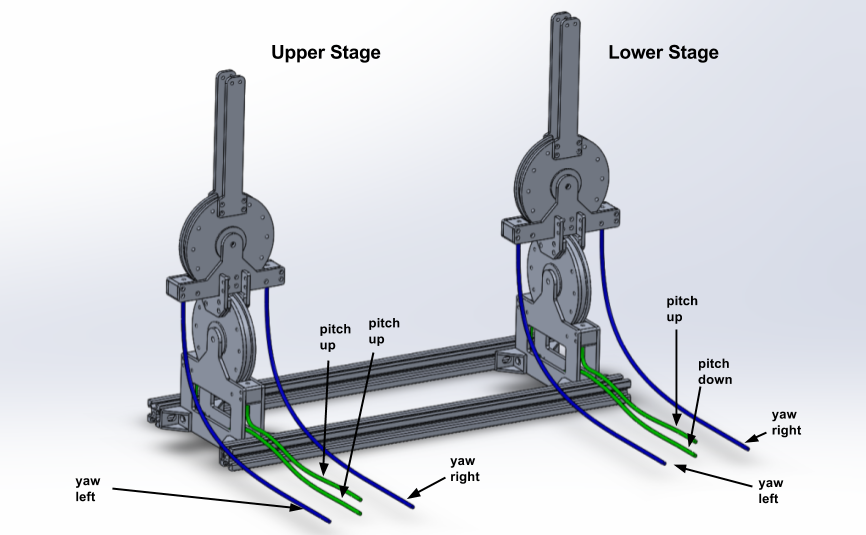
Сборка контроллеров
Каждый контроллер – это два шкива, повёрнутых под углом к друг другу и закреплённые один над другим. Хотя мы всё собираем самостоятельно, не отчаивайтесь – сложные места я поясню.
1. Сборка 4-х шкивов.
Чтобы соблюсти последовательность операций, обратитесь к анимации. Установка всех компонентов требует выбора правильных инструментов.
Компоненты:
• 4-40 Термофиксирующиеся втулки с внутренней резьбой – 2 шт
• М2 Термофиксирующиеся втулки с внутренней резьбой – 16 шт
• Заклёпки d 0,125", длиной 9/16" – 44 шт
• outer_pulley_plate – 8 шт
• inner_pulley_plate – 8 шт
• Уголки 612K-ND – 16 шт
• Винты под шестигранники 4-40, 3/16" – 16 шт
• Мелкие шайбы – 16 шт
Инструменты:
• Пресс для заклёпок
• Паяльник
Заклёпки
У себя в гараже я использую миниатюрный пресс для заклёпок, но такой инструмент можно найти и в хакерспейсе.
Термофиксирующиеся втулки с внутренней резьбой
Устанавливать такие втулки – задача, на первый взгляд кажущаяся сложной. Но на самом деле нужно лишь разогреть их паяльником при температуре в 250 С и аккуратно вставить в деталь. Не нужно давить на паяльник – всего лишь придайте кончику небольшую вибрацию, и он будет опускать втулки собственным весом. На каждую уходит по 15-20 секунд – не торопитесь.
Зажимы тросов

Чтобы соблюсти последовательность операций, обратитесь к анимации. Не забывайте, что трос проходит между шайбами и верхним уголком.
2. Установка втулок в пластины шкивов
На диаграмме ниже я обозначил все места для вставки термофиксирующихся втулок (STI) в пластины. Диаметры отверстий специально подобраны для этих втулок.
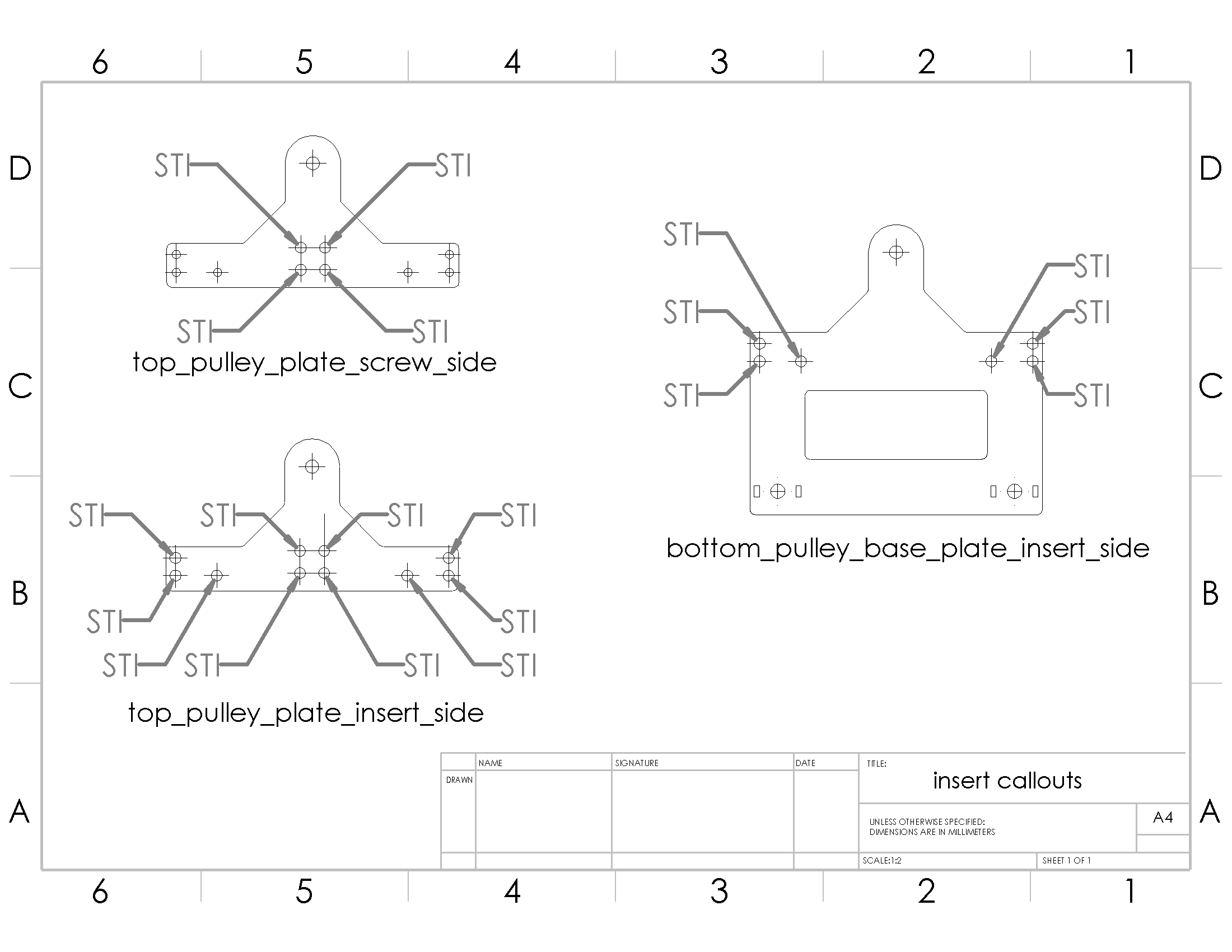
Компоненты:
• 4-40 Термофиксирующиеся втулки с внутренней резьбой – 40 шт
• top_pulley_plate_insert_side – 2 шт
• top_pulley_plate_screw_side – 2 шт
• bottom_pulley_base_plate_insert_side — 2 шт
3. Зенкование кронштейнов
Кронштейны будут скреплять верхний и нижний шкивы контроллеров. Зенкование необходимо произвести в следующих местах.
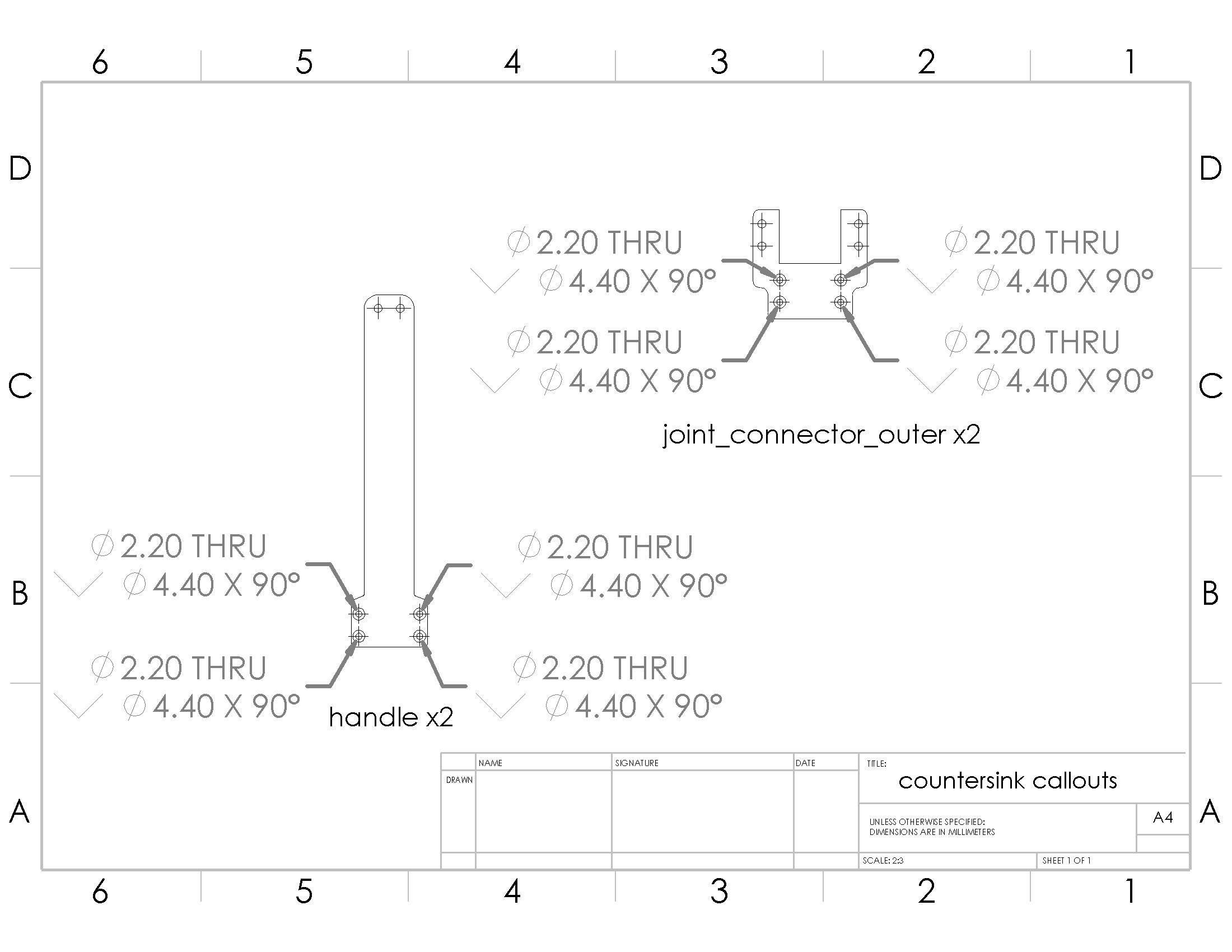
Компоненты:
• handle_plates — 4 шт
• joint_connector_outer plates – 4 шт
Инструменты:
• зенковка + упор и ручная дрель (или станок) ИЛИ
• зенковка + станок со стопором

Подробности: допуски по глубине
Винты, проходящие в отверстия пластин, должны достать до втулок, находящихся на глубине одной или двух пластин. При помощи зенкования необходимо создать потайные гнёзда, в которые головки винтов спрячутся как минимум заподлицо. Можно и глубже, только чтобы винты не высовывались с другой стороны за пределы втулок.
4. Соединяем части контроллеров
Компоненты:
• шкивы в сборе – 4 шт
• top_pulley_plate_insert_side – 2 шт
• top_pulley_plate_screw_side – 2 шт
• bottom_pulley_base_plate_insert_side – 2 шт
• bottom_pulley_base_plate_screw_side – 2 шт
• распорки между шкивами – 4 шт
• joint_spacer – 4 шт
• joint_connector_outer – 4 шт
• 6mm M2 винты под шестигранник с плоской головкой – 16 шт
• 8mm M2 винты под шестигранник с плоской головкой – 16 шт
• ступенчатый винт – 4 шт
• 8-32 гайки – 2 шт
• Распечатанная на 3D-принтере деталь cable_insert_bracket с установленными ободками – 4 шт
• .5-in 4-40 шестигранные втулки с внутренней резьбой – 4 шт
• .25-in 4-40 болты под шестигранник – 12 шт
• 3/16 4-40 винты со сферической головкой под шестигранник – 32 шт
• 612K-ND уголки – 16 шт
Инструменты:
• шестигранники
Подробности: последовательность действий
Я бы рекомендовал собирать нижнюю и верхнюю половины по отдельности, а затем соединять их вместе. Для соединения половинок мы используем уголки 612K-ND, упомянутые мною ранее.
Подробности: диаметр для осей шкивов
Ступенчатые винты должны легко проходить через шкивы.
Подробности: закрепляем контроллеры
После сборки контроллеры удобно закрепить на рельсах OpenBuilds VSlot 20?20. Таким образом можно будет подобрать удобное расстояние между ними для человека, который собирается ими управлять.
С контроллерами всё – переходим к щупальцам.
Сборка щупальцев
В этом разделе мы пройдёмся по сборке щупальца и подключению его к контроллерам.
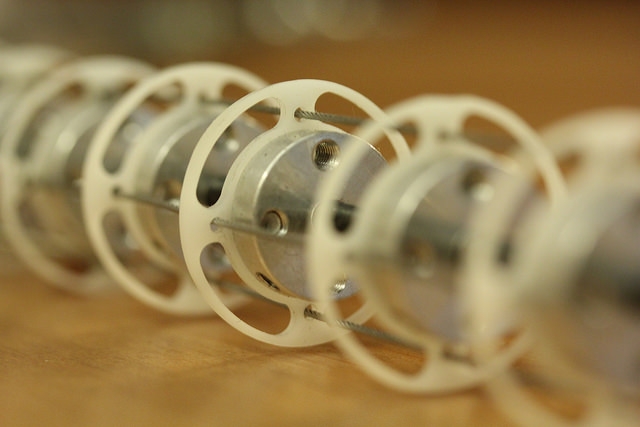
1. Подготовка ступиц
Компоненты:
• ступицы и винты – 18 шт
• сегменты из полиформальдегида – 18 шт
• 4-40 x 3-16 in. винты под шестигранник с круглыми головками – 36 шт
Инструменты:
• дрель
• сверло на 4 мм
Каждый сегмент-позвонок состоит из ступицы, пластиковой пластины и двух винтов (можно и четыре вкрутить, но они будут лишние и только добавят веса). Скрутите 18 позвонков.
Подробности: диаметр ступицы
В зависимости от диаметра используемого сердечника вам может потребоваться увеличить диаметр центрального отверстия. Удобно зажать все ступицы в тиски и рассверлить отверстие на нужный диаметр.
2. Резка троса нужной длины
Компоненты:
• трос – 7,6 м
• концевики – 4 шт
Инструменты:
• кусачки
• клещи для концевиков
• по желанию – мини-горелка
1. Нарежьте 8 кусков троса по 914 мм каждый.
2. По желанию: нагрейте на горелке один конец каждого троса до белого каления на 8 секунд, и дайте охладится. В результате он не распушится.
3. Возьмите 4 троса. На необожжённые концы наденьте концевики.
3. Сборка позвонка на сгибе
Компоненты:
• Концевики – 4 шт
• Оставшиеся 4 необжатых троса – 4 шт
Инструменты:
• Обжимка для тросов
1. Возьмите 4 оставшихся троса.
2. Каждый из концов оберните вокруг одного из горизонтальных сегментов позвонка.
3. Зажмите трос.
4. Подготовка тросов верхнего сегмента

Компоненты:
• Позвонки – 8 шт
• Обжатые тросы – 4 шт
• Тросик спидометра или гибкий канал, 610 мм
• Пружинная направляющая, 610 мм – 4 шт
Инструменты:
• Шестигранник на 1,5 мм
1. Наденьте один позвонок на конец гибкого сердечника. Шестигранником прикрепите его к концу.
2. Наденьте семь остальных позвонков и распределите их равномерно. Пока несильно закрепите их шестигранником. Сердечник должен быть заполнен позвонками примерно на треть длины.
3. Каждый из четырёх тросов проденьте через соответствующие отверстия позвонков. Проденьте так, чтобы концевик упирался в верхний позвонок.
5. Подготовка тросов для нижнего сегмента с точкой сгиба
Компоненты:
• 7 позвонков
• Позвонок со сгиба с соединёнными с ним тросами.
Slide the inflection point vertebrae into the core material and secure it gently, evenly spaced just like the other vertebrae.
1. Проденьте сердечник через позвонок сгиба и несильно прикрутите его.
2. Наденьте остальные семь позвонков и несильно прикрутите их. Проденьте 4 троса через соответствующие отверстия. Вся конструкция должна занимать примерно 2/3 длины сердечника.
6. Присоединение нижнего стопора

Ключ к качественному управлению – хорошо закреплённый стопор. У меня это квадратный кусок пластика, соединённый с основанием. Никакой магии, просто дополнительная ступица и пластина, соединённые с нижним сегментом.
7. Выровняйте позвонки
Для каждой половины щупальца убедитесь, что позвонки стоят ровно и равномерно, затем как следует затяните их.
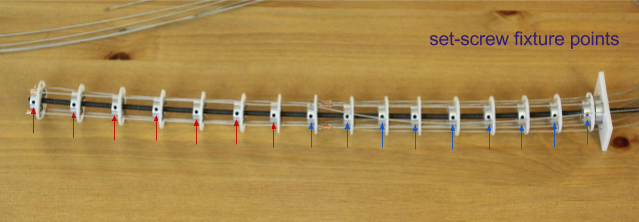
8. Продевание каналов тросов
Компоненты:
• Пружины длиной 610 мм – 4 шт
• Пружины длиной 457 мм – 4 шт
Инструменты:
• Кусачки
Почти закончили! Пружины становятся каналами для тросов. Четыре из них оканчиваются на основании щупальца. Другие четыре – на половине длины, в точке сгиба, проходя через нижнюю секцию щупальца.

1. Наденьте длинные каналы на четыре троса. Каждый из них проходит через нижнюю часть щупальца. Доведите их до точки сгиба и уприте в неё.
2. Проденьте четыре коротких канала до основания щупальца.
Настало время присоединения к контроллерам!
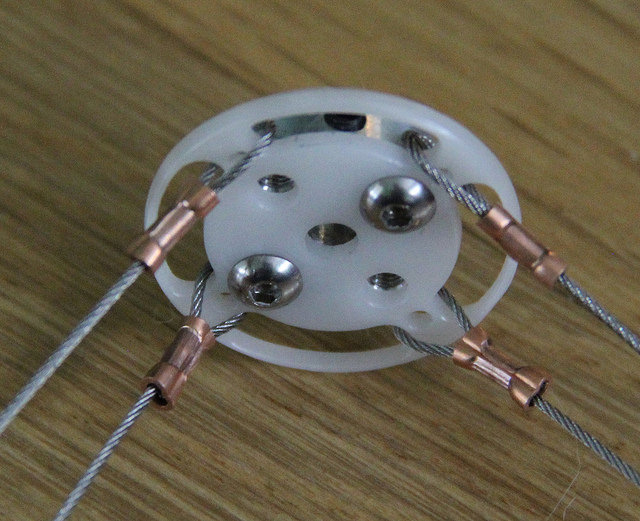
9. Соединение щупальца с контроллерами
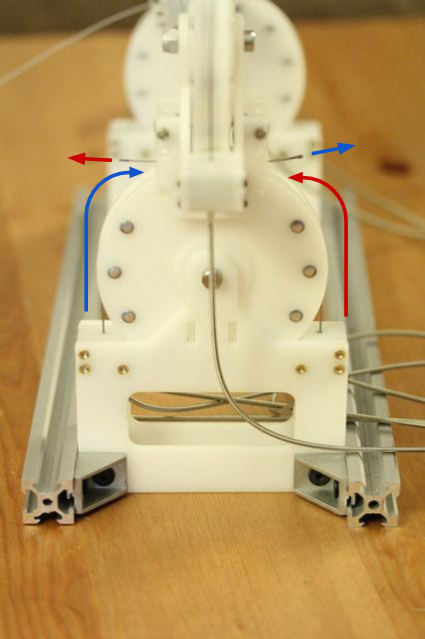
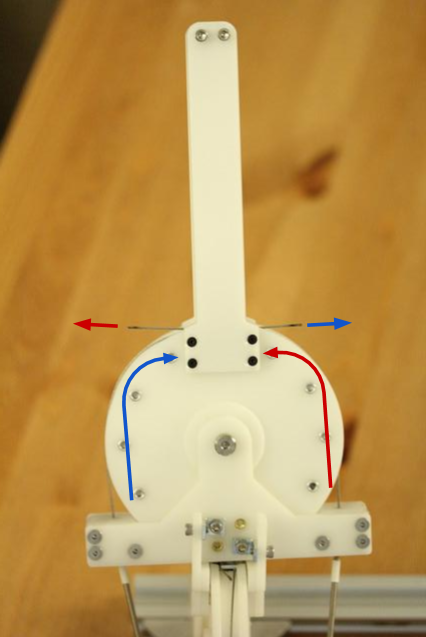
Каждая степень свободы щупальца управляется двумя дополняющими тросами, и у каждой половины есть две степени свободы. Каждый шкив контроллера соединяется с парой дополняющих тросов для обеспечения подвижности в выбранной плоскости.
Нужно разобраться в имеющейся у нас куче тросов и выбрать дополняющие пары. Можно временно скрепить их скотчем.
Каждую пару проденьте в противоположные зажимы, распечатанные на 3D-принтере, и зажмите уголками на шкивах. Выберите всю лишнюю длину тросов – они должны быть натянуты. Нужно натянуть их до тех пор, пока канал троса не упрётся в распечатанный держатель. Прикрутите зажимы проводов. Повторите для каждой пары.
10. Натяжка тросов
Двумя руками натяните дополняющие тросы, а двумя другими руками (тут может понадобиться партнёр) затяните как следует уголковые зажимы тросов.
Такой метод натяжки вполне сгодится, но я могу предложить и другой – сконструировать натяжной механизм из шестигранных втулок и болтов с осевым отверстием. Раскручиваем болт, натяжение увеличивается – третья рука уже не нужна.

11. Прикрепление основание
Лучше всего движения щупальца получаются, когда его основание хорошо закреплено и весь «позвоночник» сопротивляется скручиванию. Я использовал небольшие тиски, но эту часть плана вполне можно улучшить.
Итог
Если вы дошли до этого места и собрали новенькое блестящее щупальце – мои поздравления! Теперь сделайте 20 штук таких, прикрепите их к десятку сервомоторов и заставьте двигаться в ритме музыки. Надеюсь, что интересующийся читатель сумел извлечь для себя интересные уроки из этих статей, и спасибо, что оставались с нами.
Поделиться с друзьями

DimmiSfai
Ок, осталось почитать руководство по созданию механических-анимешных девушек и можно снимать!
Kirillko312
Девушку можно распечатать и склеить («мальчик в клубе склеил модель»))