
Формирование антропоморфной робототехники напрямую коррелирует с началом развития активных экзоскелетов: так, первый шагающий экзоскелет был создан в 1969 г. под руководством югославского исследователя и ученого, специалиста в области биомеханики и робототехники, Миомира Вукобратовича в институте им. Михаила Пупина в Белграде.
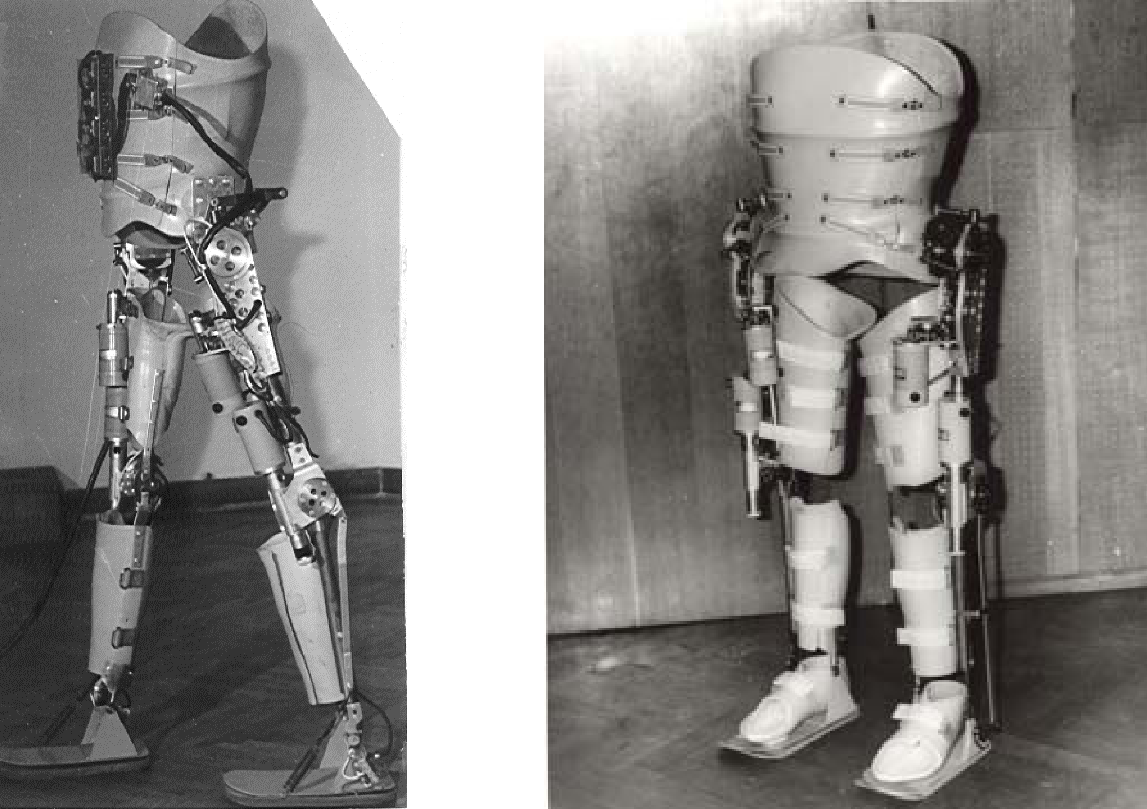
Дальнейшая доработка и детальные исследования экзоскелета велись Миомиром Вукобратовичем совместно с советскими коллегами в НИИ механики МГУ имени М.В. Ломоносова и в Центральном Государственном Институте Ортопедии и Травматологии (ЦИТО). Аппаратно-программируемый, построенный и протестированный в 1974 г. активный экзоскелет с электромеханическими двигателями изображен на фотографии ниже. На момент своего создания он предназначался для оценки и развития электромеханических двигателей ортопедических устройств и стал первым в мире образцом активного экзоскелета с электрическими двигателями в качестве силовых приводов. Этот экзоскелет можно считать полноправным предшественником современных антропоморфных роботов, приводящихся в движение с помощью электромоторов.
Используя понятие точки нулевого момента (ТНМ или Zero moment point (ZMP) на английском языке), ученые исследовательской лаборатории Икира Като в 1984 г. разработали 3D-модель двуногого шагающего робота (ДШР) и проверили свойства его силовых приводов. Профессор Като и его коллеги-ученые стали первыми, кто в 1986 г. реализовал динамическую походку ДШР с уравновешиванием туловища в роботе WL-12.

Подразумевалось, что ДШР должен самостоятельно адаптировать собственную походку к неровной поверхности и уклоняться от препятствий. Вышеупомянутой группе ученых в итоге удалось представить конструкцию корпуса робота, способного стабилизировать походку — робота WL-12, был способен делать 30-сантиметровые шаги за 2.6 секунды. При этом использовался алгоритм, генерирующий временную траекторию движения верхней части корпуса робота при предоставлении произвольно выбранной траектории движения нижних конечностей и ТНМ. Существенными недостатками WL-12 являлись неэстетичная конструкция и слабая внешняя схожесть с человекоподобными роботами в современном понимании.
На основании того же метода «Точки нулевого момента», ученые из Исследовательского центра Вако, Honda R&D Co. Ltd. (Wako Research Center), в 1986 представили антропоморфного робота HONDA, который прошел долгий путь от роботов линейки Е, от модели Е0 до модели Е6 в 1986-1993, и линейки P, от модели P1 до модели P4 в 1993-2000, и, наконец, до современной линейки ASIMO.

Антропоморфный робот Хонда. Слева направо: модели Е0, Е6, P1, P4, ASIMO 2014
В последнее время мы наблюдаем повышенный интерес к экзоскелетам, послужившим первоначальным толчком к успешным исследованиям в области статического и динамического равновесия ДШР.
В этой связи хочется отметить российский проект ExoAtlet, команда которого с 2013 года занимается разработкой медицинской версии экзоскелета для инвалидов с нарушениями локомоторных функций нижних конечностей. Алгоритмы управления позволяют осуществлять в автоматическом режиме передвижение пациента с повторением максимально естественного процесса ходьбы человека, что позволяет существенно ускорить процесс восстановления двигательной и нервной активности. На сегодняшний день компанией ExoAtlet уже представлена вторая версия действующего прототипа экзоскелета для реабилитации.

Лидером отечественной антропоморфной робототехники – и на сегодняшний день монополистом на российском рынке робототехники – является НПО “Андроидная техника”. Они зарекомендовали себя как успешная и конкурентоспособная на мировом рынке компания, которая ведет активную научно-исследовательскую и опытно-конструкторскую деятельность, а также занимается воплощением своих инновационных решений и производит постоянно совершенствующуюся линейку антропоморфных роботов AR-600.

Слева направо: модели AR-600, AR-600E, SAR-400, SAR-401
В начале 2000-х компания Новая Эра из Санкт-Петербурга сделала попытку создать первого российского антропоморфного ДШР ARNEO, которая, к сожалению, не увенчалась успехом. Одним из интересных решений, предложенных Новой Эрой, являлось использование вентильных бесконтактных электромоторов постоянного тока мощностью 60 Вт, которые изготавливались непосредственно самой компанией и имели высокие удельные характеристики, позволяющие развивать довольно большую мощность, учитывая нагрузку на ноги ДШР.

Фото: enlight.ru/post/6043/
Данный обзор был подготовлен по материалам прикладного научного исследования ДШР, проводимого Лабораторией Интеллектуальных Робототехнических Систем (ЛИРС) Университета Иннополис. Разработка и исследование систем управления механикой движения антропоморфных робототехнических комплексов на основе контроля статического и динамического равновесия входит в число текущих проектов лаборатории. Руководитель лаборатории: профессор Евгений Магид, автор более 40 научных работ*. Подробный обзор по современным антропоморфным роботам будет представлен в следующем материале.
При лаборатории открыт набор студентов в магистратуру на направление «Робототехника» — [подробности и условия поступления]
* Работы профессора Магида опубликованы на английском, русском и японском языках, проиндексированы в международных рейтингах с присвоением индекса Хирша 6 и процитированы более 300 раз в работах других зарубежных ученых по версии Google Scholar.

Дальнейшая доработка и детальные исследования экзоскелета велись Миомиром Вукобратовичем совместно с советскими коллегами в НИИ механики МГУ имени М.В. Ломоносова и в Центральном Государственном Институте Ортопедии и Травматологии (ЦИТО). Аппаратно-программируемый, построенный и протестированный в 1974 г. активный экзоскелет с электромеханическими двигателями изображен на фотографии ниже. На момент своего создания он предназначался для оценки и развития электромеханических двигателей ортопедических устройств и стал первым в мире образцом активного экзоскелета с электрическими двигателями в качестве силовых приводов. Этот экзоскелет можно считать полноправным предшественником современных антропоморфных роботов, приводящихся в движение с помощью электромоторов.
Используя понятие точки нулевого момента (ТНМ или Zero moment point (ZMP) на английском языке), ученые исследовательской лаборатории Икира Като в 1984 г. разработали 3D-модель двуногого шагающего робота (ДШР) и проверили свойства его силовых приводов. Профессор Като и его коллеги-ученые стали первыми, кто в 1986 г. реализовал динамическую походку ДШР с уравновешиванием туловища в роботе WL-12.

Подразумевалось, что ДШР должен самостоятельно адаптировать собственную походку к неровной поверхности и уклоняться от препятствий. Вышеупомянутой группе ученых в итоге удалось представить конструкцию корпуса робота, способного стабилизировать походку — робота WL-12, был способен делать 30-сантиметровые шаги за 2.6 секунды. При этом использовался алгоритм, генерирующий временную траекторию движения верхней части корпуса робота при предоставлении произвольно выбранной траектории движения нижних конечностей и ТНМ. Существенными недостатками WL-12 являлись неэстетичная конструкция и слабая внешняя схожесть с человекоподобными роботами в современном понимании.
На основании того же метода «Точки нулевого момента», ученые из Исследовательского центра Вако, Honda R&D Co. Ltd. (Wako Research Center), в 1986 представили антропоморфного робота HONDA, который прошел долгий путь от роботов линейки Е, от модели Е0 до модели Е6 в 1986-1993, и линейки P, от модели P1 до модели P4 в 1993-2000, и, наконец, до современной линейки ASIMO.

Антропоморфный робот Хонда. Слева направо: модели Е0, Е6, P1, P4, ASIMO 2014
В последнее время мы наблюдаем повышенный интерес к экзоскелетам, послужившим первоначальным толчком к успешным исследованиям в области статического и динамического равновесия ДШР.
В этой связи хочется отметить российский проект ExoAtlet, команда которого с 2013 года занимается разработкой медицинской версии экзоскелета для инвалидов с нарушениями локомоторных функций нижних конечностей. Алгоритмы управления позволяют осуществлять в автоматическом режиме передвижение пациента с повторением максимально естественного процесса ходьбы человека, что позволяет существенно ускорить процесс восстановления двигательной и нервной активности. На сегодняшний день компанией ExoAtlet уже представлена вторая версия действующего прототипа экзоскелета для реабилитации.

Лидером отечественной антропоморфной робототехники – и на сегодняшний день монополистом на российском рынке робототехники – является НПО “Андроидная техника”. Они зарекомендовали себя как успешная и конкурентоспособная на мировом рынке компания, которая ведет активную научно-исследовательскую и опытно-конструкторскую деятельность, а также занимается воплощением своих инновационных решений и производит постоянно совершенствующуюся линейку антропоморфных роботов AR-600.

Слева направо: модели AR-600, AR-600E, SAR-400, SAR-401
В начале 2000-х компания Новая Эра из Санкт-Петербурга сделала попытку создать первого российского антропоморфного ДШР ARNEO, которая, к сожалению, не увенчалась успехом. Одним из интересных решений, предложенных Новой Эрой, являлось использование вентильных бесконтактных электромоторов постоянного тока мощностью 60 Вт, которые изготавливались непосредственно самой компанией и имели высокие удельные характеристики, позволяющие развивать довольно большую мощность, учитывая нагрузку на ноги ДШР.

Фото: enlight.ru/post/6043/
Данный обзор был подготовлен по материалам прикладного научного исследования ДШР, проводимого Лабораторией Интеллектуальных Робототехнических Систем (ЛИРС) Университета Иннополис. Разработка и исследование систем управления механикой движения антропоморфных робототехнических комплексов на основе контроля статического и динамического равновесия входит в число текущих проектов лаборатории. Руководитель лаборатории: профессор Евгений Магид, автор более 40 научных работ*. Подробный обзор по современным антропоморфным роботам будет представлен в следующем материале.
При лаборатории открыт набор студентов в магистратуру на направление «Робототехника» — [подробности и условия поступления]
* Работы профессора Магида опубликованы на английском, русском и японском языках, проиндексированы в международных рейтингах с присвоением индекса Хирша 6 и процитированы более 300 раз в работах других зарубежных ученых по версии Google Scholar.
BelBES
А наработки от этой «Новой Эры» куда-то пошли, или канули в небытие вместе с самой компанией?
ilena Автор
нам не удалось выйти на связь с Новой Эрой, как мы не старались. Поэтому прокомментировать ЧТО стало с наработками не могу :(
frog
Они перестали этим заниматься вскоре после того, как я туда в 2003-м ездил (статью писал про ARNEO). Две фотографии, кстати, в вашей статье мои ( http://enlight.ru/post/6043/ )
ilena Автор
frog не сохранилось ли контактов?
добавила ссылку на вашу статью в пост, спасибо!
frog
Нет, не сохранилось… Но я буквально пару-тройку месяцев назад где-то то-ли по телевизору, то-ли на youtube видел короткий отрывок из интервью с одним из разработчиков. Его как раз спросили про судьбу проекта. Он кратко ответил, что проект закрыли и что на новом месте работы он использует некоторые идеи, но в другой области.
frog
Вот нашёл. Оказывается это было в форуме, а не по ТВ. Процитирую целиком:
— На enlight.ru хорошая статья, однако, к сожалению, мы больше не занимаемся роботом. Так сложилось, что чуть больше года
назад главный вдохновитель этой идеи, Ген. Директор «Новой Эры» ушёл оттуда на «Завод Электропульт», и наш отдел (в числе
прочих) переместился туда же. Роботы, разумеется, остались на «Новой Эре», и, насколько я знаю, с ними ничего не происходит.
А на «Электропульте» бывший сектор робототехники занимается, в основном, разработкой промышленных двигателей и АСУ ТП.
Тем не менее, разработка команды симуляционного (программного) футбола продолжилась (я являюсь руководителем группы
разработчиков), и мы заняли 1 место в 2D Симуляционной Лиге на чемпионате RoboCup в 2004 году. Сейчас начали делать 3D
вариант программы.
К сожалению, мы не очень внимательно следили за робототехническим сообществом в России (а зря, похоже), так что почитать ваш
форум было интересно.
Люди из Ассоциации Спортивной Робототехники связывались со Львом Александровичем Станкевичем (наш научный руководитель из
Политеха), но, насколько я знаю, их общение ничем почему-то не закончилось. Хотя, на мой взгляд, идея хорошая.
Пообщаться вполне можно, например, на «Электропульте», или, возможно, в Политехе. Роботов показать не сможем, а футбол — пожалуйста.
— Alexei Kritchoun <alexy_kr AT mail.ru>
— roboforum.ru/forum34/topic292.html
ilena Автор
спасибо:)