
Роботов существует великое множество. Одно из семейств — дельта-роботы, разновидность параллельных роботов. Состоят представители семейства из трех рычагов, которые прикреплены посредством карданных шарниров к основанию. Особенность, которую можно назвать ключевой — использование в конструкции манипулятора параллелограммов. Это позволяет сохранить пространственную ориентацию исполнительного устройства робота. Впервые подобная система была создана в начале 1980-х Реймондом Клавелем.
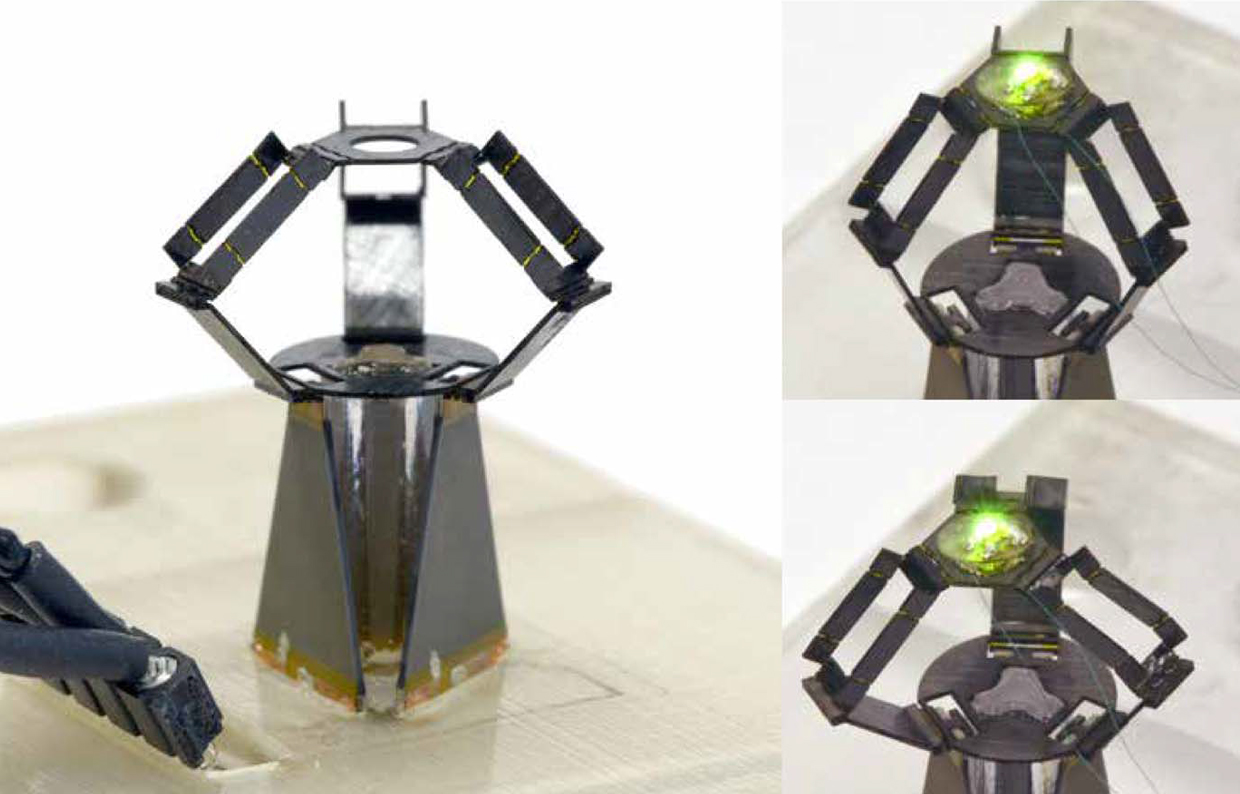
Недавно был представлен очередной робот, созданный робототехником из Гарварда (Robert Wood Microrobotics Lab at Harvard) Хейли Макклинтоком (Hayley McClintock). Система примечательна тем, что это самый маленький из дельта-роботов. Его размеры составляют всего 15 мм*15 мм*20 мм, а вес — 430 миллиграммов. Тем не менее, он может переносить полезный груз весом в 1,3 грамма. Точность движений робота составляет 5 микрометров.
Но больше всего удивляет то, с какой скоростью этот робот способен двигаться: около 0,45 м/с, с ускорением в 215 м/с2.
MilliDelta работает благодаря пьезоэлектрическим приводам, которые начинают действовать, если возникает электрический ток. Остальное в конструкции робота — неподвижный корпус, созданный из углеродного волокна и дополнительных элементов, обеспечивающих особые свойства робота. Корпус вырезается лазером, поскольку добиться такой точности при использовании любого другого инструмента практически невозможно.
Что может делать малютка? Например, переносить (очень быстро) полезный груз, хотя бы и очень небольшой массы. Он может использоваться на производстве, для сборки разного рода миниатюрных конструкций. Также он может применяться при микрохирургии. К примеру, использовать его было бы неплохо в хирургии глаза, где он был бы максимально полезен.
Стоит отметить, что Реймонд Клавел сделал свое устройство для работы на шоколадной фабрике. Изначальная задача была паковать небольшие шоколадные конфеты автоматически. До этого работу выполняли люди или люди «при поддержке» полуавтоматов. Для того, чтобы добиться своей цели, нужен был очень быстрый робот, способный двигаться без промедления.
Первая идея инженеров — работа с гидравлическими моторами как более мощными, чем все остальные. Но они не подходили для заданной цели, поскольку конфеты весили всего десять граммов каждая, и мощный мотор при всех его достоинствах никак не мог совладать с такой малюткой. И тогда пришла идея использовать робота с очень легкими, но в то же время, манёвренными манипуляторами. Это оказалась действительно удачная идея, которая продолжает развиваться и сегодня.
Структуру робота, его конструкцию, было выбрать сложно. «Мне пришлось работать и дома, и в офисе, причем с обычными подручными вещами, вроде принадлежности для вышивки. Это требовалось для создания структуры, которая будет просто работать», — говорит создатель дельта-систем.
И решение появилось в виде робота, состоящего из трех манипуляторов, которые управляют каким-либо объектом небольшого размера и веса. Идея оказалась удачной, и конструкция стала использоваться если не повсеместно, то достаточно широко. У робота три поступательных и одна вращательная степень свободы. Концы рычагов, сделанных из легких материалов, прикреплены к небольшому основанию. Входные связи при движении перемещают треугольную платформу в направлении X, Y или Z. Привод может быть запущен при помощи линейного или вращающего двигателя.
В 1987 году компания Demaurex купила лицензию для робота, которого стала использовать для создания упаковки. В 1991 году Реймонд Клавель представил уже свою докторскую работу, основой которой послужили результаты испытаний роботов. В 1999 году он получил за свой вклад в развитие дельта-робота золотую награду. В том же 1999 году компания АВВ начала продажу дельта-робота собственной конструкции.
Миниатюрный робот, о котором говорится выше, может найти применение в промышленности, медицине, науке и многих других сферах. Правда, для этого его разработчикам придется потратить еще немного времени на коммерциализацию своего изобретения.
Комментарии (14)

StDmitirev
20.01.2018 09:47+3Прочитав название статьи подумал, что робот ловко лепит из бумаги бумажных журавликов. А он с бешеной скоростью пентаграммы рисует.




YegorVin
20.01.2018 13:11-175 Гц? Диффузор ему, пусть качает басс :)
Даешь динамики с новым принципом работы!

wiha
20.01.2018 14:52"MilliDelta работает благодаря пьезоэлектрическим приводам, которые начинают действовать, если возникает электрический ток" Piezoelectric bending actuators can be modeled
as a force source proportional to the magnitude of the input voltage
in parallel with a nonlinear spring (28) Какой ток? Куда ток?
agat000
Не совсем понятно, что за пьезо-привод такой, что даёт такой размах движения. Там же деформации обычно микронные. Может электростриция, а не пьезо?
Штука отличная получилась. Может заменить электромеханический манипулятор стоимостью в тысячи долларов.
hardegor
Вот более понятная статья с подробностями.
perfect_genius
hardegor
Упс. Тогда вот на этой странице статья за 2018 год «The milliDelta: A high-bandwidth, high-precision, millimeter-scale Delta robot», сейчас самая верхняя в списке. Видимо ключ для доступа формируют на лету, а я его обрезал.
pant-79
Размах движения дает система рычагов. На видео видно, как мало сдвигается основание привода, так что вполне может быть и пьезо…
hardegor
Оригинальная статья в pdf