

Лунный ровер «Юйту-2» проехал за третий лунный день 43 метра, добавив их к пройденным 44 (44.185) метрам в первый лунный день и 76 метрам (75.815) во второй лунный день. Итого пройдено 163 метра за три лунных дня. Это много или мало? И почему такое небольшое расстояние проезжает лунный ровер в этой миссии?
1. Космический аппарат «Чанъэ-4» совершил успешную посадку на обратной стороне Луны и прислал первое фото
2. Бортовое видео процессов подготовки и совершения посадки, а так же панорама обратной стороны Луны от «Чанъэ-4»
3. Видео процесса спуска ровера «Юйту-2», его первые метры по поверхности Луны. Двухнедельный сон на Луне закончен
4. Гордость и страсть, история о превращении мечты в космический проект
5. Лунный орбитальный зонд NASA сделал первые снимки Китайской станции «Чанъэ-4» — два пикселя света
6. Модуль «Чанъэ-4» и ровер «Юйту-2» готовы ко второй ночи на обратной стороне Луны
7. Лунный орбитальный зонд NASA сделал новые снимки Китайской станции «Чанъэ-4» — ближе и яснее
8. Интересные факты об истории Китайской лунной программы и космической миссии «Чанъэ-4»
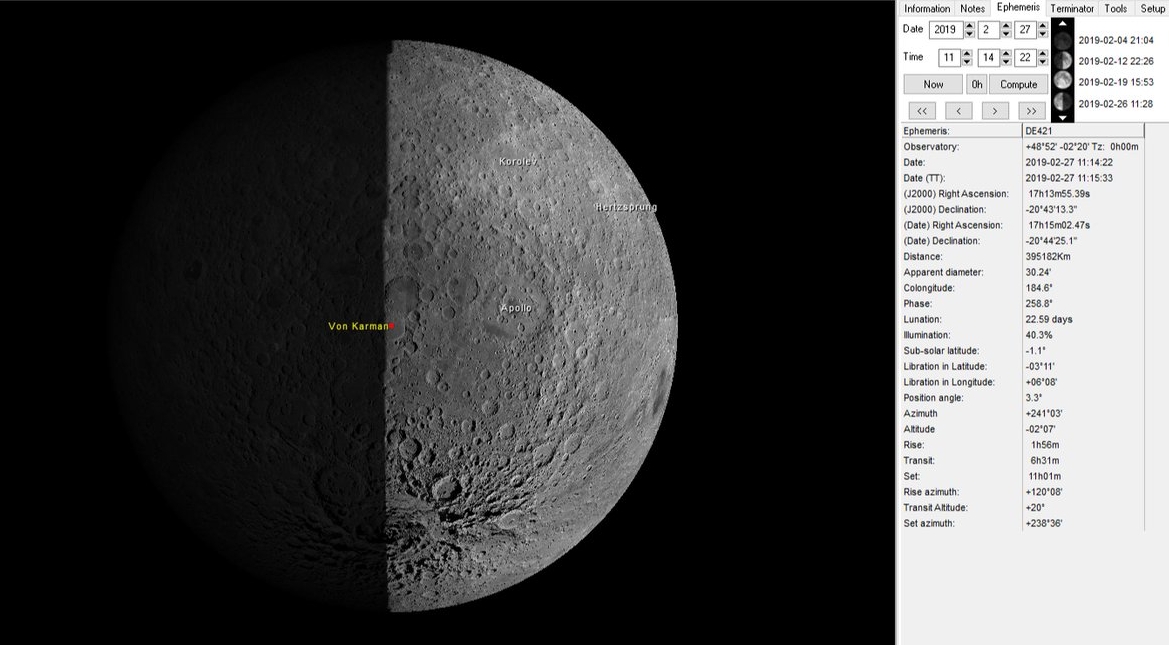
Третий лунный день для миссии «Чанъэ-4» — это период с 27 февраля 2019 года по 13 марта 2019 года:
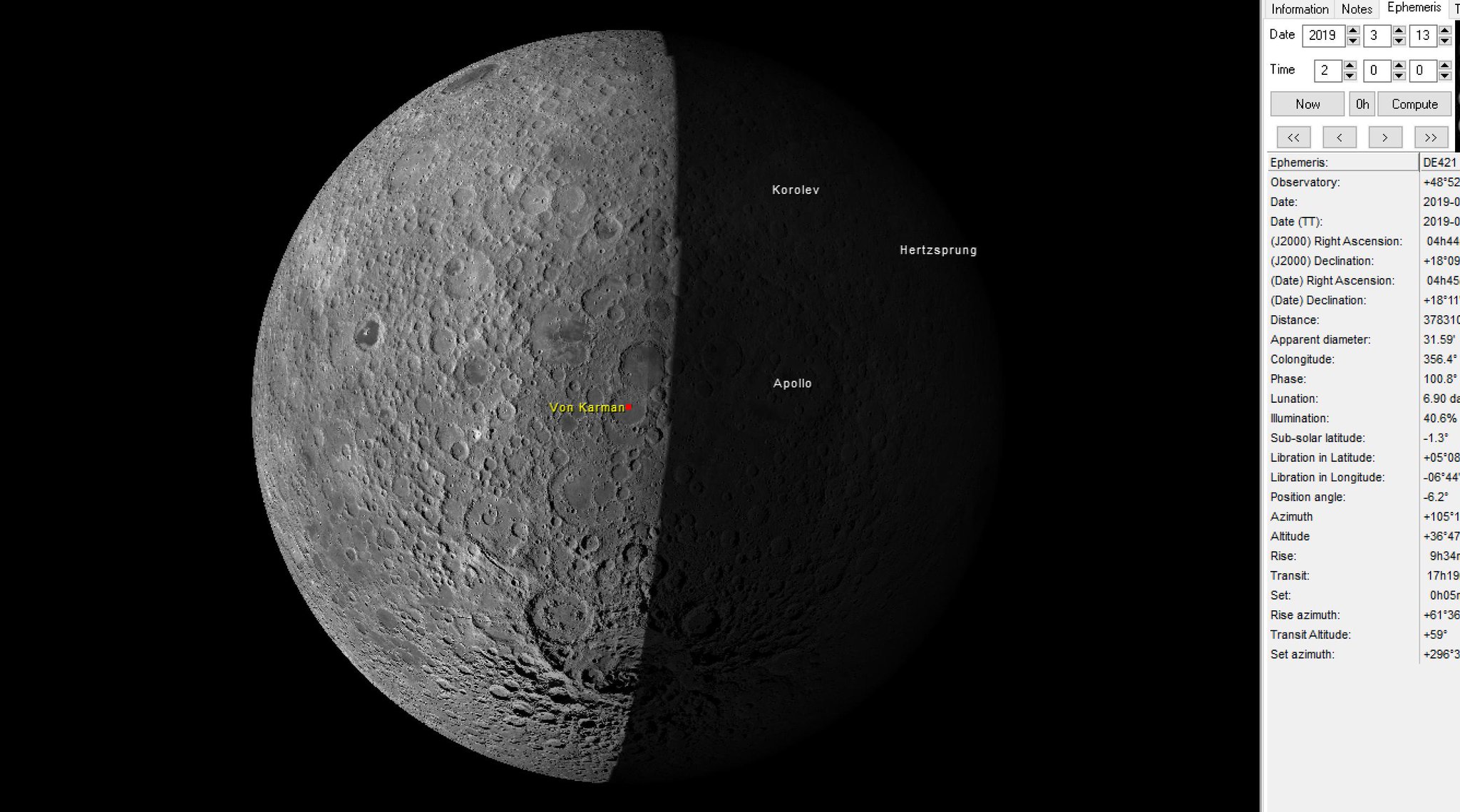
В настоящее время с 13 марта 2019 года оборудование посадочного модуля «Чанъэ-4» и ровер «Юйту-2» переведены в спящий режим до окончания третьей лунной ночи, чтобы пережить период крайне низкотемпературной среды на обратной стороне Луны.
Какая там поверхность на обратной стороне Луны?
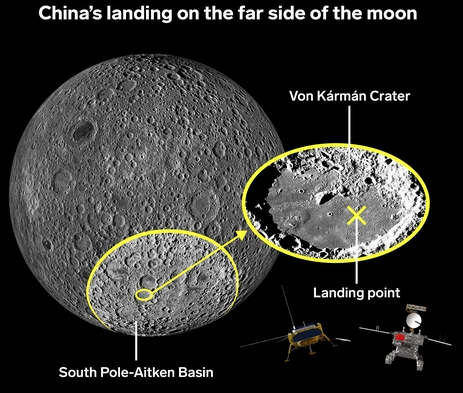
Поскольку обратная сторона Луны также имеет более сложный рельеф, чем видимая с Земли сторона, то в процессе движения по поверхности ровер «Юйту-2» столкнулся с более серьезными двигательными проблемами и помехами, по сравнению с теми, с которыми ранее сталкивался его предшественник ровер «Юйту», отправленный на Лунную поверхность в 2013 году.
К сожалению, первый ровер «Юйту» миссии «Чанъэ-3», 25 января 2014 года был технически обездвижен (поломка элементов в результате столкновения) после преодоления 114,8 метра по сложной лунной поверхности.
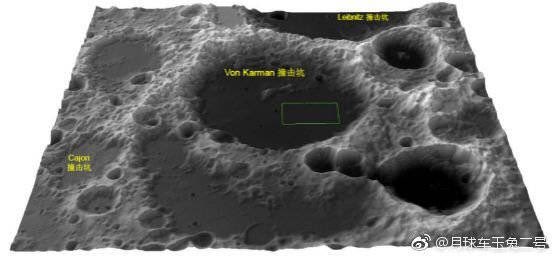
Лунная поверхность в зоне высадки посадочного модуля «Чанъэ-4» изобилует складками, многочисленными камушками и небольшими кратерами, после совершения каждого своего небольшого движения, ровер «Юйту-2» должен остановиться, сфотографировать поверхность вокруг и отправить эти данные обратно на Землю через спутник-ретранслятор.
Ученые, операторы в ЦУПе и инженеры на Земле затем обрабатывают эти данные и намечают дальнейший маршрут, по которому ровер «Юйту-2» будет следовать далее.
Антенны ровера «Юйту-2» необходимо настроить так, чтобы они указывали на спутник-ретранслятор, для корректной отправки и получения управляющих сигналов, в то время как солнечные панели ровера должны быть оптимально наклонены для попадания на них большого количества солнечного света, чтобы максимизировать выработку электроэнергии в момент совершения передачи данных.

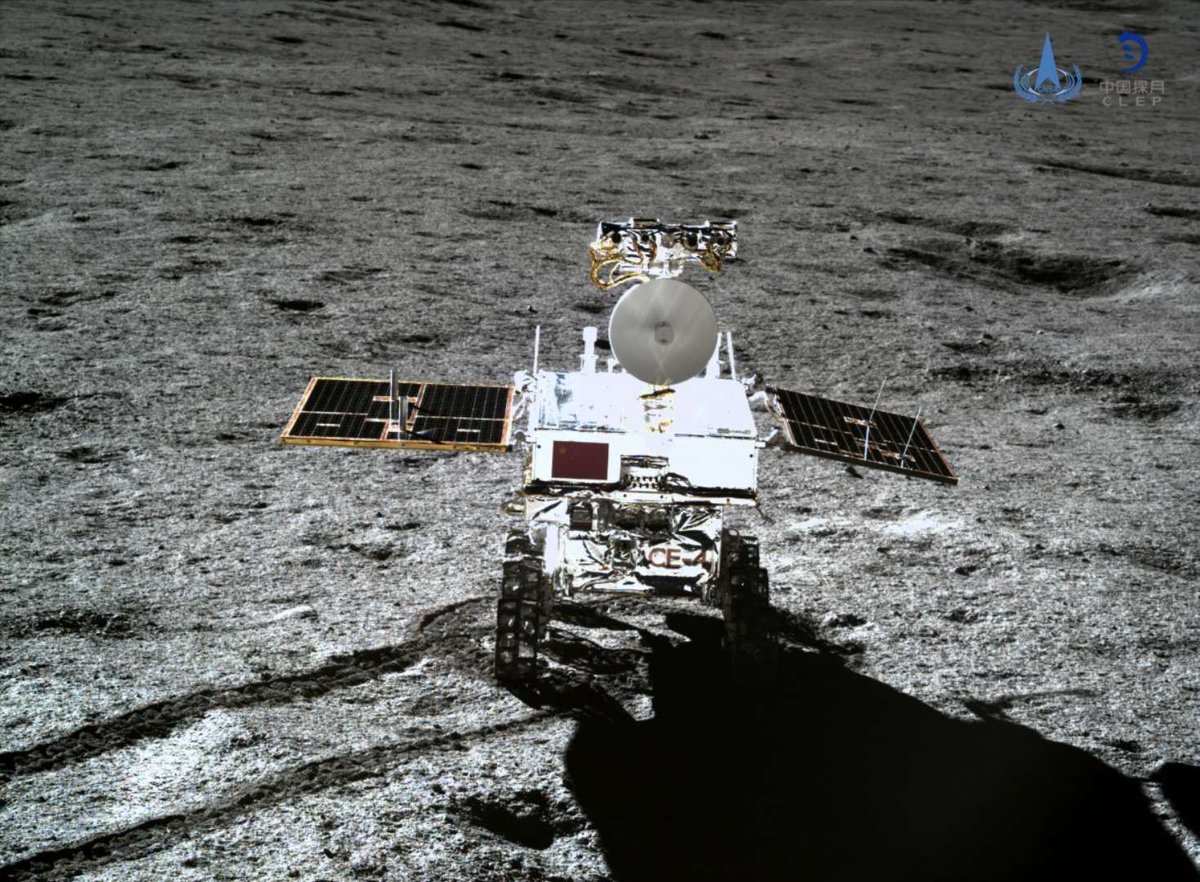
Шестиколесный ровер «Юйту-2»:
— общая масса ровера составляет около 140 кг (310 фунтов);
— грузоподъемность — около 20 кг (44 фунта);
— может перемещаться по наклонам и имеет автоматические датчики, предотвращающие столкновение с другими объектами;
— электроэнергией ровер обеспечивается с помощью двух солнечных батарей, позволяющих роверу работать в течение лунного дня;
— максимальная скорость 200 метров в час (данную скорость на Луне все равно не достигнуть – так как элементы на поверхности не дадут разогнаться и выведут из строя ровер раньше);
— максимальная площадь исследования – 3 кв. км;
— расчетное время работы – 3 месяца (2160 часов);
— максимальная расчетная дистанция – 10 км.
На данный момент прошло 70 дней (1680 часов) после высадки ровера «Юйту-2» на Лунную поверхность и 97 дней (2328 часов) после запуска с космодрома Сичан ровера «Юйту-2» в составе миссии «Чанъэ-4» на Луну.
Фактически, ровер «Юйту-2» уже выработал свой расчетный рабочий ресурс, но в случае успешного «пробуждения» после сна 27 марта 2019 года, планируется, что он будет продолжать заниматься исследованиями поверхности и на свой четвертый лунный день.
Но вот насколько хватит его возможностей в плане работоспособности — это уже сверх проектной нормы и будут начинаться проблемы или поломки в узлах и системах, так как большие перепады температуры, радиация, загрязнение и другие лунные внешние факторы будут влиять на его характеристики сильнее с каждым часом.
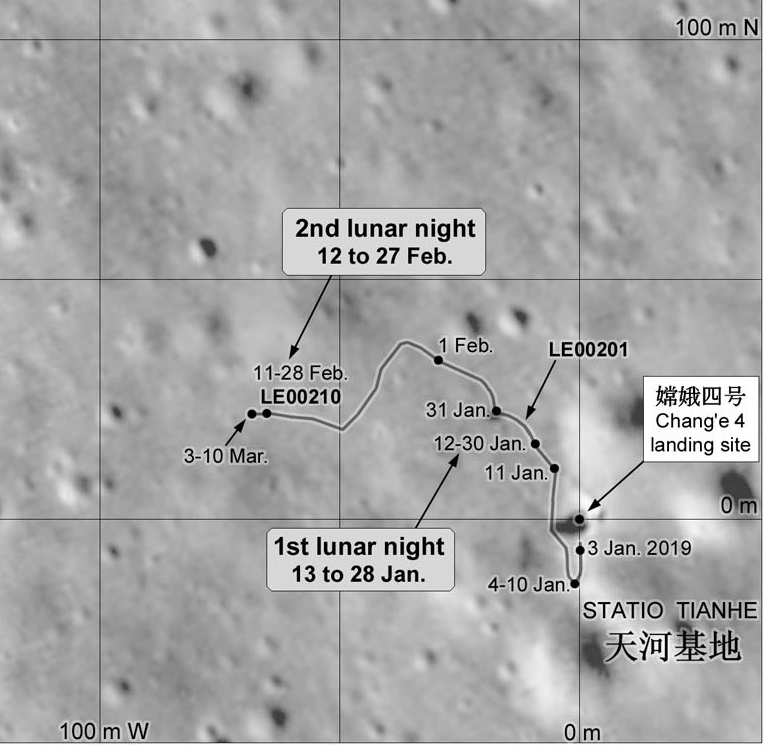
Траектория движения ровера «Юйту-2» в первый лунный день и часть второго лунного дня:
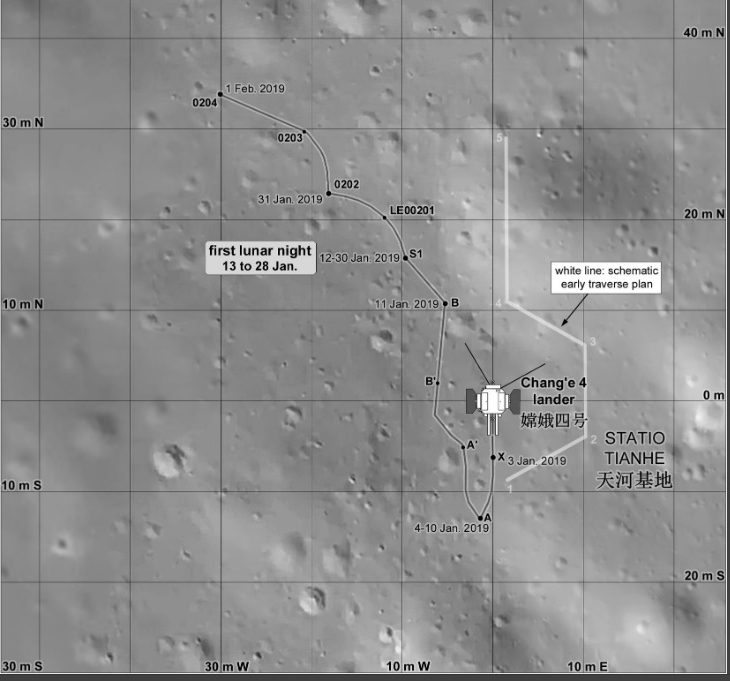
Можно сверить по фото места посадки, которое сделал зонд NASA LRO с высоты 82 километров, разрешение 0,85 метра (33 дюйма) на 1 пиксель:

На данный момент ровер «Юйту-2» находится на расстоянии более 80 метров по диагонали от посадочного модуля «Чанъэ-4» и проехал уже 163 метра после своей высадки.
Почему ровер «Юйту-2» так мало проехал?
Во-первых, это «боязнь» обездвижить ровер «Юйту-2» (и не повторить судьбу первого ровера «Юйту»), поэтому роверу «Юйту-2» необходимо передвигаться по поверхности Луны, старательно избегая препятствий. Каждое его сантиметровое движение нужно делать аккуратно и правильно. В ЦУПе миссии «Чанъэ-4» стараются избегать ситуации, при которой ровер «Юйту-2» перевернется, что означает, что он не сможет снова вернуться в рабочее положение. Солнечные панели на бортах лунного ровера «Юйту-2» очень хрупкие, они могут треснуть или покрыться пылью после падения, что приведет их в негодность.
Во-вторых, обратная сторона Луны чаще подвержена падению метеоритов, поэтому рельеф там очень сложный, на Лунной поверхности в зоне высадки очень много небольших кратеров и углублений, которые нужно объехать на максимально безопасном расстоянии, но все равно нужно двигаться дальше в поисках нужных для изучения элементов поверхности — больших камней и образований. А их поиск и исследование разных образований — это необходимые так же вынужденные и остановки для проведения исследований на одном месте с длительным временем остановки.
Таким образом, в первый и второй лунный день с помощью данных с бортовых камер ровера «Юйту-2» также дорабатывалась детальная карта зоны места посадки и возможного дальнейшего маршрута ровера, который оказался намного извилистее, чем планируемый ранее прямой путь.
В третий лунный день, ровер «Юйту-2» доехал до места с интересными для изучения образованиями на лунной поверхности — острые пики на поверхности, средние и большие отдельно стоящие камни.
Элементы ландшафта на обратной стороне лунной поверхности могут быть старше, чем подобные на видимой стороне, поэтому изучение грунта и камней на обратной стороне может пролить больше света на происхождение и эволюцию Луны.
Кто управляет ровером «Юйту-2»?
Телеметрия, данные с камер и научного оборудования, команды управления и круглосуточное слежение за параметрами ровера «Юйту-2» — это прерогатива инженеров аэрокосмического центра управления Китайской академия космических технологий.
В Китае Луна традиционно ассоциируется с женщинами, китайская программа исследования Луны тоже названа в честь богини Луны — Чанъэ, что подчеркивает вклад женщин-ученых и инженеров в развитие космических исследований.
В китайской легенде девушка по имени Чанъэ полетела на Луну и стала там богиней, но не может вернуться обратно на Землю, чтобы воссоединиться со своим мужем.
Девушкам-инженерам аэрокосмического центра управления Китайской академия космических технологий повезло больше – у многих из них есть возможность слетать «виртуально» на Луну и быть одновременно на Земле со своими близкими.
Оказывается, что женщины из инженерной команды по управлению и контролю ровера «Юйту-2» обладают более сильным чувством ответственности и усидчивостью, чем многие их коллеги мужчины, они более требовательны и наблюдательны к самым мелким деталям в процессе работы с ровером «Юйту-2». Поэтому, среди группы инженеров-операторов ровера «Юйту-2», они могут максимально проявлять научные и инженерные таланты в своей работе.
Проверка данных телеметрии с коллегой:

Рабочее место оператора ровера «Юйту-2»:

А теперь вернемся к роверу «Юйту-2».
Более трех миллиардов лет назад обратная поверхность Луны подверглась бомбардировке крупными астероидами и метеоритами, что вызвало глобальные изменение на ее поверхности, следы этого процесса и изучает ровер «Юйту-2».
Бортовые камеры ровера «Юйту-2» стационарные, для получения нужных изображений необходимо выполнять точное перемещение и регулировку горизонтального положения, а также компенсацию угла наклона самого ровера, что занимает у операторов в ЦУПе много времени. Ведь поверхность в зоне высадки ровера «Юйту-2» усеяна кратерами разных размеров, что очень затрудняет его безопасное передвижение.
Оказывается, ровер «Юйту-2» способен автоматически обходить некоторые препятствия, если перед ним будет большой камень или кратер, то он может самостоятельно остановиться и спланировать новый маршрут в обход этого места, в этом случае оператор в ЦУПе может зарегистрировать данную ситуацию и перестроить планируемый маршрут на новый.
Ровер «Юйту-2» также может подниматься по небольшим склонам и пересекать каменистую поверхность. Но основной фронт его работы — движение по плоской горизонтальной поверхности и лунному грунту.
Так что же это за такой прибор «спектрометр VNIS», установленный на борту ровера «Юйту-2»?
Лунный инфракрасный спектрометр VNIS (The Visible and Near-Infrared Imaging Spectrometer) был разработан в Шанхайском институте технической физики Китайской академии наук.
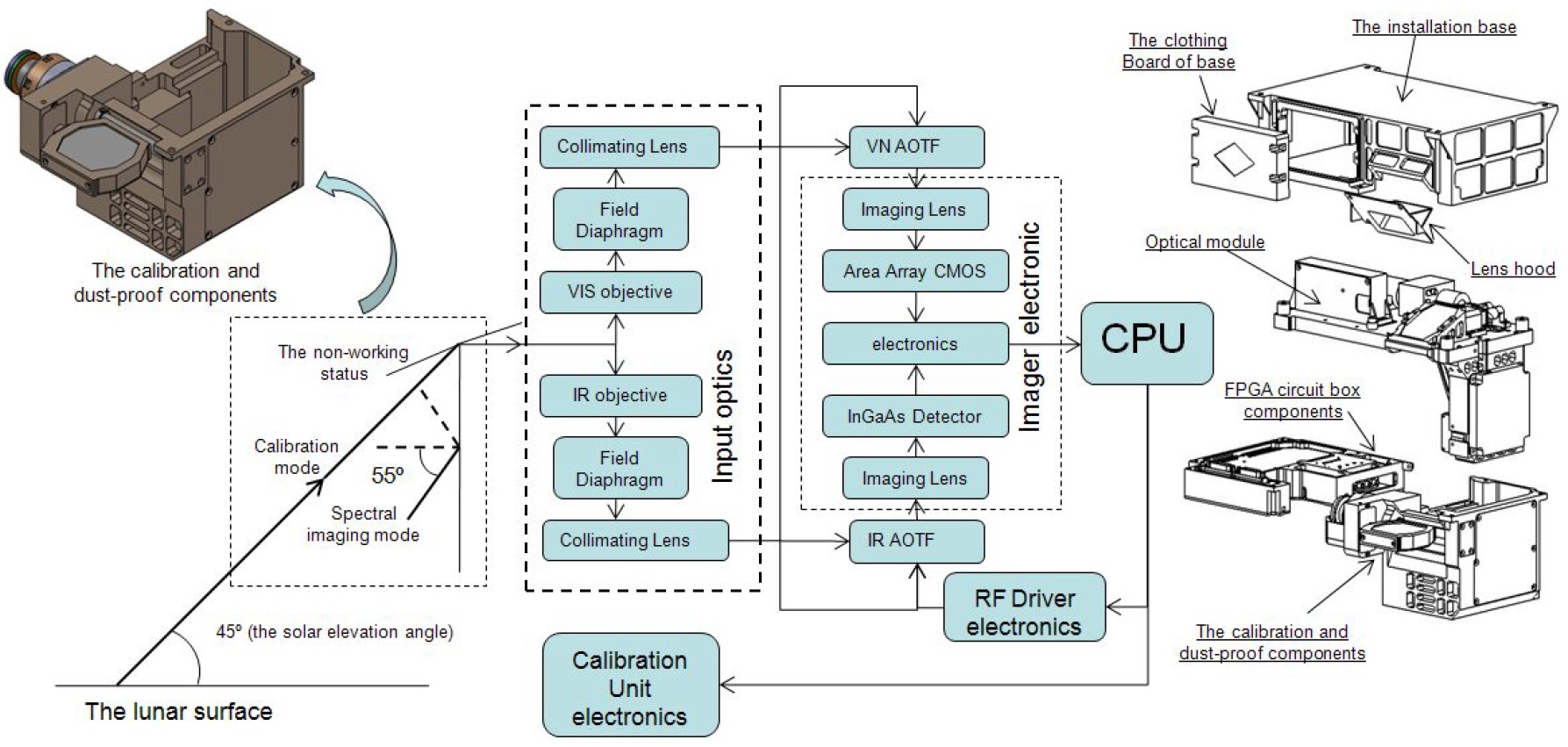
В спектрометре используется неколлинеарные акустооптические перестраиваемые фильтры, он состоит из видеоспектрометра VIS/NIR (0,45–0,95 мкм) и коротковолнового ИК-спектрометра (0,9–2,4 мкм), также в его составе есть калибровочный блок с защитой от пыли и загрязнений.
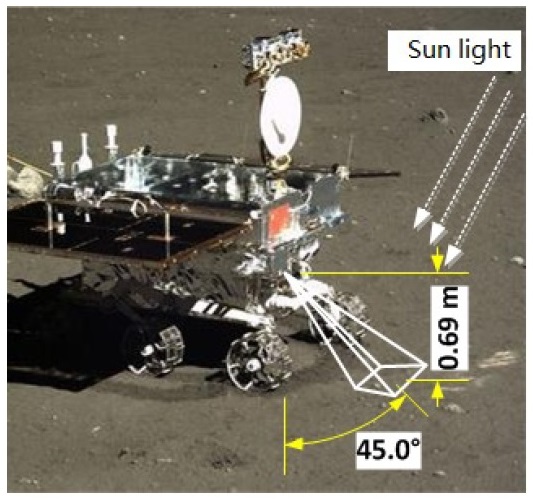
Спектрометр установлен спереди на борту ровера «Юйту-2», имеет следующие ограничения по позиционированию и работе с лунным материалом:
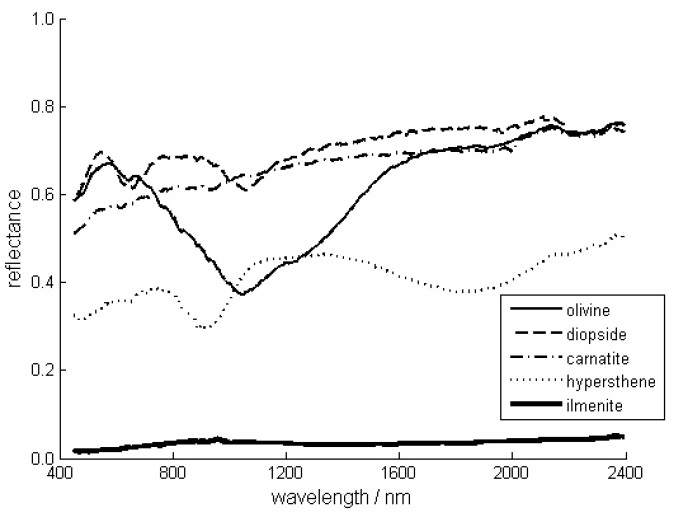
Минералы, такие как пироксен, плагиоклаз, оливин и ильменит, которые составляют большую часть лунных поверхностных пород, имеют отличительные спектральные характеристики:
Структурная схема работы спектрометра:
Основные технические характеристики спектрометра:

Внешний вид спектрометра:

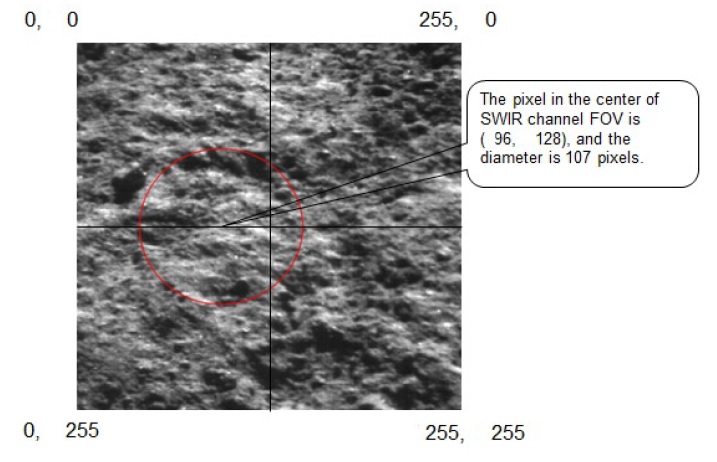
Геометрические размеры окна детекции:
Данные, получаемые спектрометром:
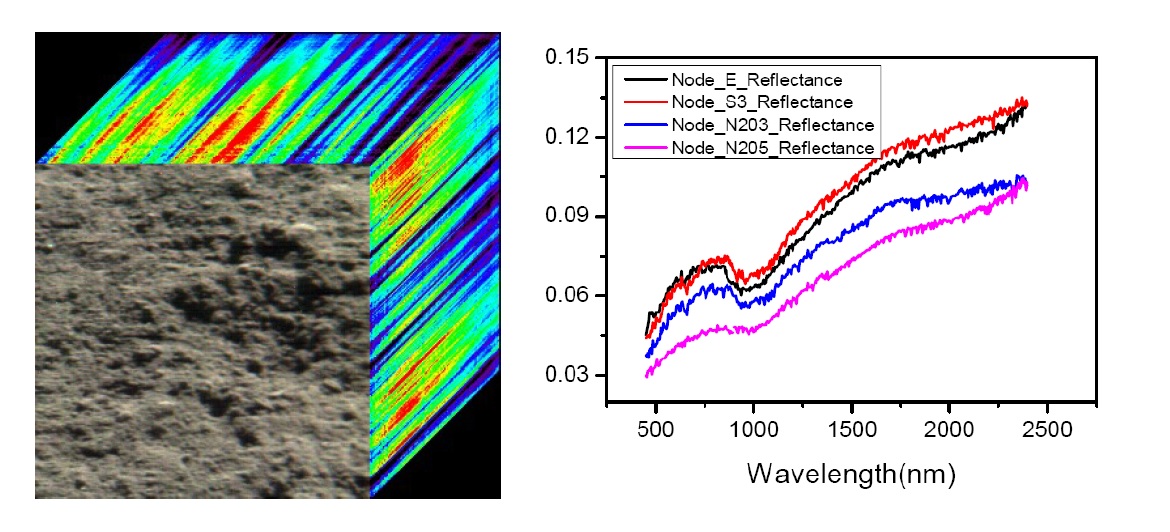
В третий лунный день ровер «Юйту-2» занимался получением научных данных с использованием бортового стационарного спектрометра VNIS (Visible and Near-Infrared Imaging Spectrometer), у которого ширина поля зрения датчика составляет всего несколько сантиметров, поэтому необходимо очень точно и аккуратно позиционировать ровер «Юйту-2», чтобы можно было выводить «глаз» спектрометра на нужный участок лунной поверхности получать корректные данные с оптимального расстояния.
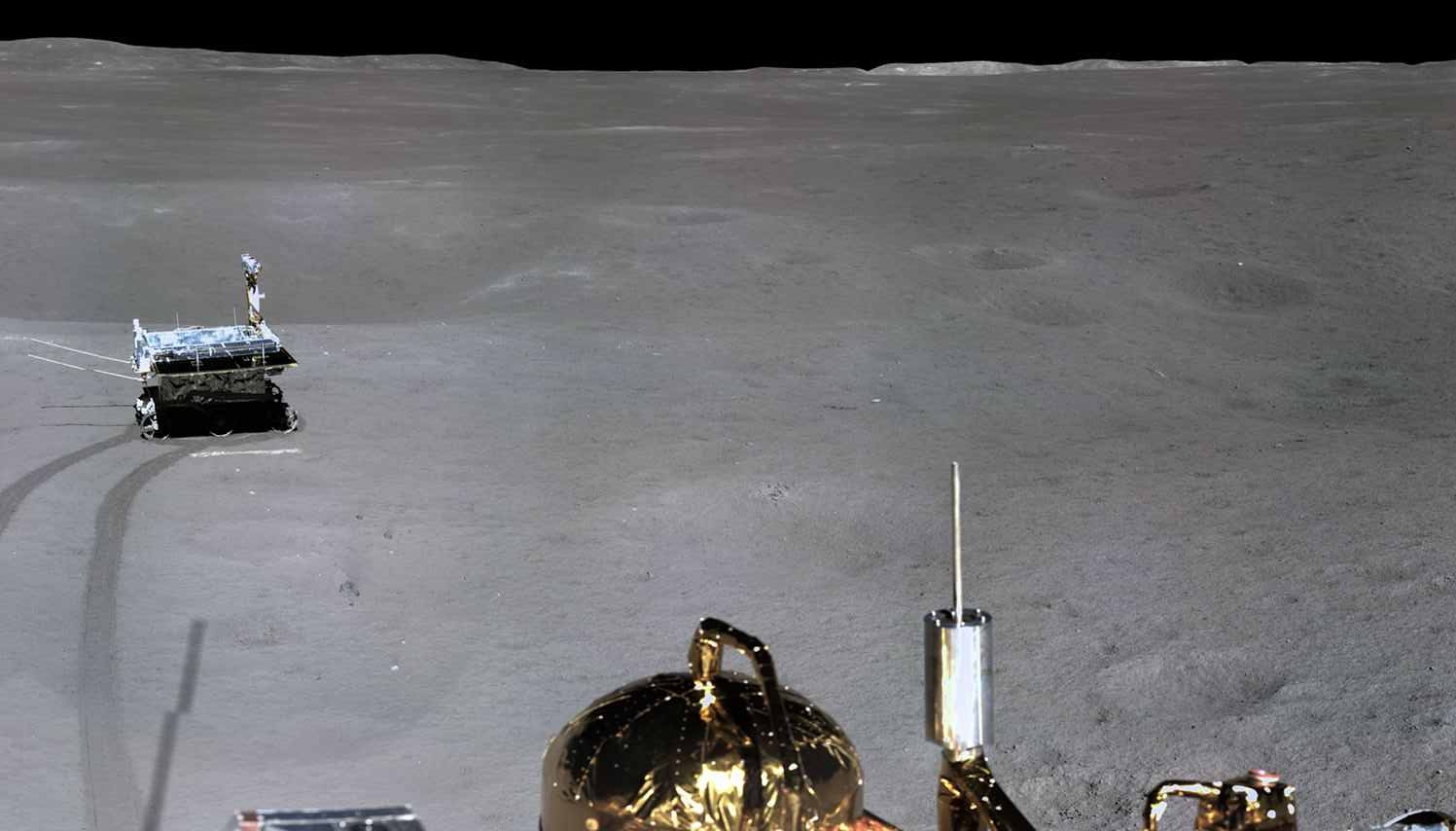
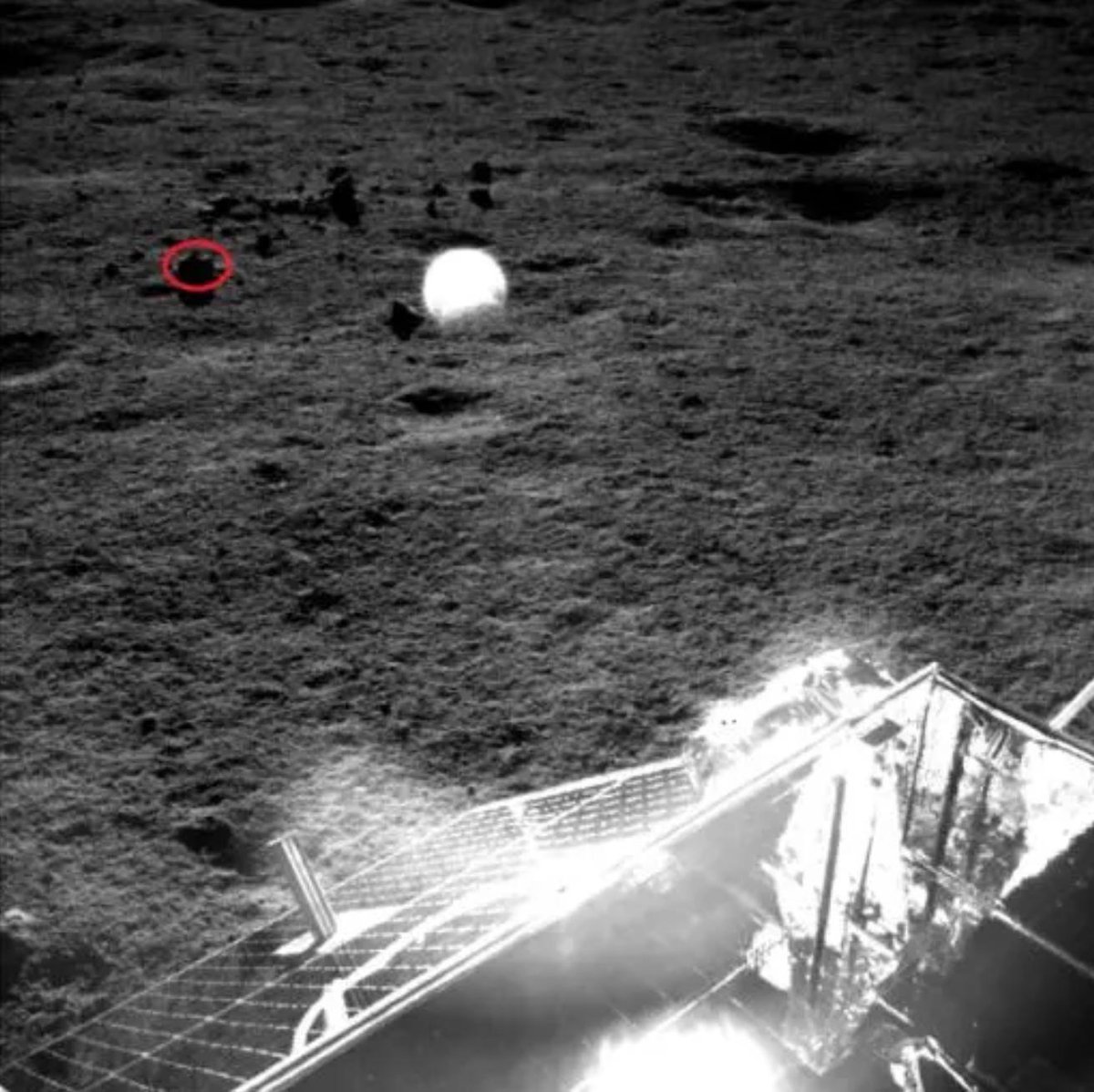
После своей небольшой прогулке по Луне, ровер «Юйту-2» достиг интересной каменной «полянки», в центре которой был обнаружен большой камень диаметром 20 сантиметров. Ученых сразу заинтересовал эта находка, ее происхождение (метеорит, лунное образование) и процесс образования.
Общий вид панорамы поверхности во время поиска камней:

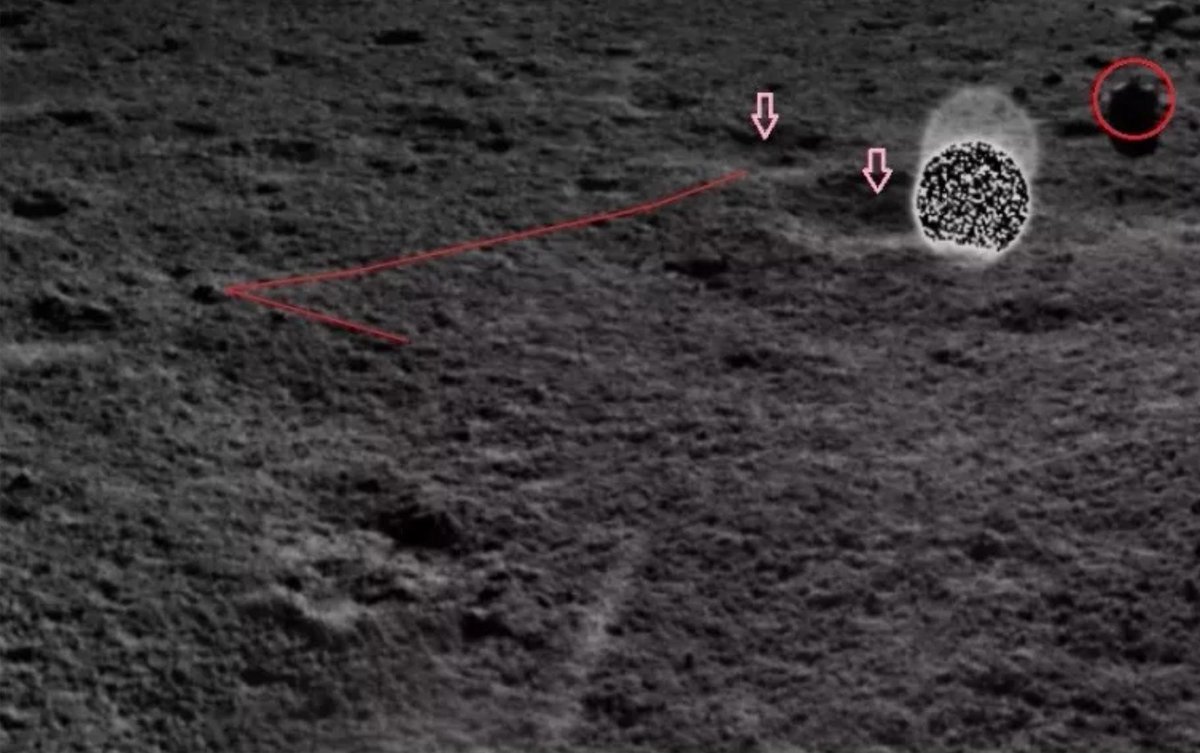
Каменистая поверхность, до большого камня (его диаметр 20 сантиметров) расстояние 120 сантиметров:

Увеличенное изображение большого камня:


Работа со спектрометром:
Далее, данные со спектрометром ровера «Юйту-2» передаются в аэрокосмический центр управления Китайской академия космических технологий, где они анализируются, хранятся и будут открыты научному обществу.
Так же заработал Китайский портал «Система публикаций и сбора научных данных и исследований лунного и глубокого космоса», на котором будут публиковаться и обрабатываться полученные данные и изображения от «Чанъэ-4» (и более ранних миссий).
Путь до портала:
http://202.106.152.98:8081/moondata/
По объему данных тоже интересный момент, например, ровер «Юйту-2» после выполнения измерений с помощью спектрометра в четырех разных точках лунной поверхности передал общий объем данных размером 350 МБ.
Научные измерения элементов лунной поверхности и передачу данных с приборов ровера «Юйту-2» планируется продолжить в четвертый лунный день.
Комментарии (26)

sim31r
15.03.2019 02:29Странно что для самоходных роверов на Луне и Марсе не предусмотрен режим автопилота. Алгоритм же представляется простым, так как скорости небольшие. Объезжать крупные препятствия, не допускать крена, если незапланированное что-то остановиться и ждать указаний из центра управления или вернуться в безопасную позицию задним ходом. Автопилот и среагирует более чутко не непредвиденные препятствия и проведет ровер намного быстрее, чем это сделает удаленный оператор с редкими сеансами связи. Даже если это 1 метр в минуту, за сутки это будет 1440 метров, на порядки больше, чем при ручном управлении. Возможно, это будет в следующих проектах, после сбора статистики (хотя она и до этого была и не сильно отличается от земных пустынь, где роверы и испытывают традиционно).
Просто удивляет ситуация на фоне успехов в области обычных автомобилей, когда автопилот уже кажется чем-то обыденным.
grondek
15.03.2019 06:36Возможно, автопилоту нужно много дополнительного относительно тяжелого и габаритного оборудования. Плюс возможность отказа. И энергия там ограничена.
Лучше запихать в аппарат побольше научного оборудования.sim31r
15.03.2019 22:14Все что делает оператор, может делать автопилот на имеющемся на борту процессоре. Только будет быстрее и надежнее. Нужно просто дополнить программный код. Приборы для навигации уже есть на борту, как видеокамера, так и вероятно что-то вроде лидаров, для точной ориентации.
Gourry_aka_pm
15.03.2019 09:03Все-таки автопилоты на тех уровнях, которые идут на серийных авто, работают в довольно тепличных условиях, и даже на этом уровне требуют контроля оператора.
sim31r
15.03.2019 22:05Точно наоборот! У автопилота типа Тесла скорости до 200 км/ч, надежность выше(!) надежности водителя по статистике, на миллионы километров 0 ошибок управления. Условия не всегда тепличные, из-за бесконечного окружения человеческим фактором. На этом фоне тепличные условия как-раз на Луне, статистическая картинка поверхности и всё, никаких сюрпризов и не ограниченное время для анализа. Даже если завис не проблема, перезагрузился, провел диагностику и дальше анализировать.

Eklykti
16.03.2019 14:500 ошибок управления.
Заехал под фуру и разрезал водителя пополам он благодаря исключительно корректному управлению, ага.
sim31r
17.03.2019 12:38+1Выборочное цитирование. Изначально было
надежность выше(!) надежности водителя по статистике, на миллионы километров 0 ошибок управления
Пример пробега одного из 50 000 автомобилей
Автомобиль Тесла с пробегом в 644 тыс. км. принадлежит компании TesClub, которая с 2015 года предлагает свои услуги электротакси в Калифорнии и Неваде. Tesla Model S 90D проходит более 27 тысяч километров каждый месяц с самого первого месяца эксплуатации авто.
Или вот статья на Хабре 2016 год
Компания подчёркивает, что впервые человек погиб за более чем 210 млн км, которые проехали автомобили Tesla Model S в режиме автопилота.
По статистике США, если учитывать все автомобили, то авария со смертельным исходом происходит примерно каждые 151 млн км. По мировой статистике — каждые 97 млн км.
Сейчас 2019 год и те автопилот стал еще «умнее». Ошибка с низким расположением сенсоров учтена. Дело движется к запрету ручного управления. А вот человеческий фактор не предсказуем.

solariserj
17.03.2019 16:31+1> На этом фоне тепличные условия как-раз на Луне, статистическая картинка поверхности и всё, никаких сюрпризов и не ограниченное время для анализа.
Тепличные условия это асфальтированная дорога с разметкой, и в малой степени возможность использовать энергию и не парится о её запасе и теплоотводеsim31r
18.03.2019 01:42Разметка противоречива, есть сотни знаков на дороге, которые нужно анализировать в контексте общем за миллисекунды, так как 1 секунда это 50 метров пути.
Ровер же едет со скоростью менее метра в минуту, тут нет никаких сложностей с теплоотводом, мотор мощностью несколько Вт справится вполне. Нет требований к реальному времени, проехал 10 см, можно остановиться, проанализировать поверхность и дальше ехать. Условия не сравнимые, автопилоту автомобиля сложнее на порядок.
Bedal
15.03.2019 10:04Странно что для самоходных роверов на Луне и Марсе не предусмотрен режим автопилота.
хм:
способен автоматически обходить некоторые препятствия
просто не требуется уметь ехать «на всю заправку»
pnetmon
15.03.2019 11:02Думается что на Луне этот аппарат может ехать только в определенное время, в остальное время или слишком для него жарко от Солнца или холодно из-за отсутствия Солнца.
Стоимость человеко часов оператора очень мала по сравнению со всем проектом или в случае марсианских это не поездка ради расстояния.
Обычно в наземных условиях показывают планетоходы имеющие некий автопилот, возможно он так же присутствует и в реальных аппаратах.
sim31r
15.03.2019 22:16Тем не менее, расстояние всегда указывают как одно из основных достижений. Больше пройденное расстояние, больше объектов для изучения, всегда есть вероятность найти что-то интересное.

Georgy9
15.03.2019 09:09В принципе, аппарату вовсе не обязательно бегать по Луне на как можно более дальние дистанции. Большой разницы в данных не будет, пройдет он 100 или 1000 метров. Важнее собрать как можно больше инструментальных данных. А для этого нужно стоять и мерить.
sim31r
15.03.2019 22:20Ценность каждого последующего локального измерения будет экспоненциально падать, так как это будет копия предыдущего измерения. Что-то ценное можно найти на удалении, измеряя инструментально как можно более разнообразные области поверхности.
Georgy9
15.03.2019 22:36В данном случае это не так. В пределах нескольких сотен метров можно найти массу интереснейших экземпляров. А чтобы изменился состав грунта нужно уезжать на десятки километров, на что этот аппарат явно не способен (ниже про телеметрию все объяснили). Представьте, что вы на Земле в пустыне или степи, много ли изменится, пройди вы хоть десяток километров?

lebedinskiy
15.03.2019 19:20Интересно, какая задержка при трансляции онлайн видео с луны?

denis-19 Автор
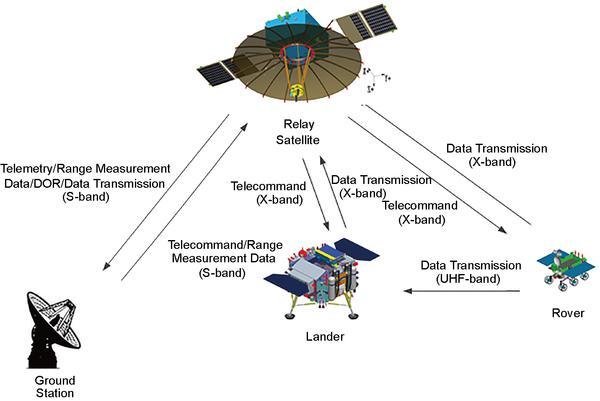
15.03.2019 19:22Телеметрия с «Чанъэ-4» поступает от спутника-ретранслятора «Цэюцяо», что приводит к задержке получения данных на Земле до двух-трех минут.
Оба лунных устройства обмениваются данными с Пекинским центром аэрокосмического контроля, используя спутник-ретранслятор «Цэюцяо».
На анимации ниже показан способ передачи данных c обратной стороны Луны.
Схема связи миссии

Схема связи элементов проекта:
Georgy9
15.03.2019 20:36Вот спасибо, теперь понятно, почему такие сложности с передвижением — постоянные перерывы трансляции.
nzamb1
15.03.2019 19:23Почему ровер Юйту-2 такой легкий по сравнению с Луна2?
denis-19 Автор
15.03.2019 19:29У Юйту-2 другие научные задачи и он сейчас на обратной стороне Луны — управлять им более сложнее. Тем более, что новое освоение Луны только началось и далее будут более тяжелые роверы посылаться и станционные модули развертываться, вплоть до жилых.

lebedinskiy
15.03.2019 22:10Было бы классно, если бы на луне была веб камера с онлайн трансляцией, пусть даже с задержкой в несколько минут ;-)
sim31r
15.03.2019 22:23Онлайн трансляция будет не отличима от оффлайн трансляции зацикленной в течение лунного дня, однотипные восходы и закаты ))
solariserj
С Юйту понятно, но что там с Чанъэ-4? Какие там ещё инструменты работают?
denis-19 Автор
— голландско-китайскоий низкочастотный спектрометр LFS для изучения лунной ионосферы, солнечных вспышек и наблюдений неба в радиодиапазоне в целом;
— германский LND для измерения уровня радиации и исследования быстрых и тепловых нейтронов;
— цветная топогрфическая камера TCAM (2352х1728 пикселей) для круговых панорам — о ней я постараюсь написать отдельно — кто и как ее проектировал и производил.
solariserj
Ждать ли ещё статьи? С удовольствием почитал о результатах и сравнении с Чанъэ-3.