
Инженеры из Массачусетского технологического института (МТИ) и Исследовательского института Toyota разработали новое техническое решение для обучения автомобильных беспилотных систем, которое дополняет существующие системы анализа препятствий в прямой видимости их сенсоров. Теперь бортовой компьютер беспилотного автомобиля может автономно анализировать ситуацию, когда вне поля зрения его сенсоров (лидаров, радаров и камер), например, за углом на подземной парковке или за стеной дома, находится движущийся объект. Тогда беспилотный автомобиль может оценить вероятность пересечения их траекторий и избежать аварии, причем в этом случае ему помогут только косвенные признаки препятствия на дороге — появление на дороге новой тени, изменение ее размера.
В алгоритмах для беспилотных автомобилей используется широкий набор датчиков для отслеживания объектов на дороге. Однако, большой объем данных, которые передают эти датчики, содержат информацию о препятствиях, находящихся в прямой видимости. Но обычные водители используют также различные предположения, основанные на личном опыте, для определения наличия объектов, которые они не видят, но могут быть на их пути — увидеть свет фар сбоку или быстро растущую тень, а также услышать нарастающий шум двигателя или шелест шин.
Для того, чтобы расширить возможность стандартных алгоритмов для беспилотных автомобилей, инженеры МТИ создали новую систему, позволяющую обнаруживать приближающиеся объекты из-за угла по их тени или другому изменению освещения.
Их решение анализирует поток видеоданных с бортовых камер, создает на их основе объемную модель окружающей среды и проецирует на нее определенные кадры, которые могут попасть по косвенным признакам под зону его интереса. Например, автомобиль едет вдоль стены, а ее угол уже близко, далее дорога есть в нескольких направлениях, причем увидеть момент выезда из-за угла другого транспортного средства обычные датчики оперативно не могут.
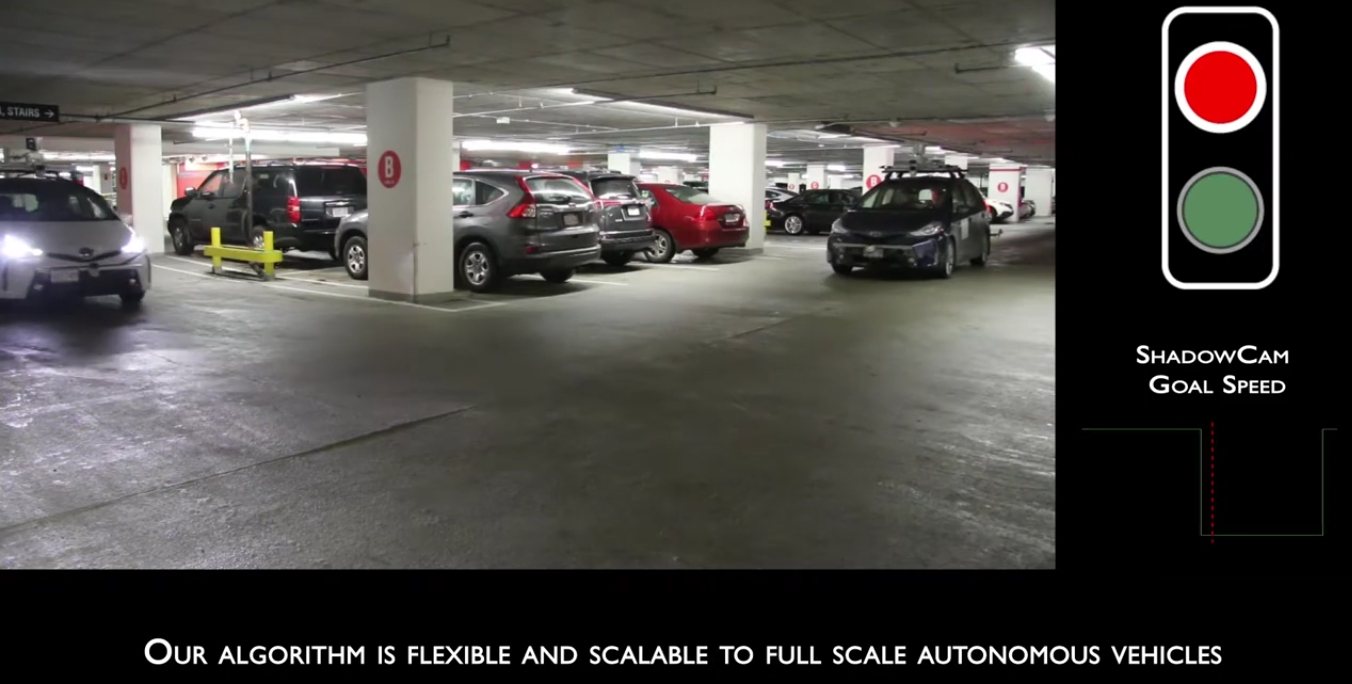
Таким образом, система самостоятельно обнаружила зону интереса и начала отслеживать и анализировать данные по ней. Для более точного анализа на обрабатываемом изображении усиливается насыщенность, что позволяет с большой точностью определить разницу между появлением тени и ее дальнейшим движением, а также статичной освещенной областью дороги впереди. Если алгоритм обнаруживает, что тень начала двигаться или освещение меняется, что выносится решение о торможении или изменении траектории для избежания столкновения. Разработчики отмечают, что их алгоритм смог обнаружить двигающееся препятствие по изменению освещения впереди на дороге на 0,7 секунды быстрее, чем беспилотный автомобиль получил данные с лидара об этой ситуации. Это значит, что алгоритм смог предугадать и включить систему избежания столкновения с препятствием, которое не находилось в прямой видимости, а после этого еще проехало расстояние от трех до пяти метров на небольшой скорости по парковке, когда его и зафиксировали штатные датчики беспилотного автомобиля.
Ниже на видео можно посмотреть два примера тестирования такой дополнительной системы — в офисе, когда специальное робокресло зафиксировало изменение теней перед собой и остановилось, чтобы не сбить человека и на беспилотном автомобиле, который смог затормозить перед тем, как другой автомобиль выехал из-за стены и пересек его путь.
Существующие на данный момент системы помощи водителям также могут помочь избежать аварии, если их владельцы столкнутся с подобной ситуацией. Однако, способность таких систем быстро среагировать зависит от расстояния до препятствия, чем дальше, тем более точнее и правильнее будет реакция. А их аналитическая способность, в том числе и быстрота принятия решения, зависит от необходимости фактического появления объектов на дороге. Вот пример, как в темное время суток медведица с медвежатами перебегала дорогу перед Tesla, автопилот которой остановил электромобиль в безопасном режиме.
Комментарии (4)

fkeel
31.10.2019 05:30пока что не очень похоже на рабочую технологию, слишком много будет ложных срабатываний. Как например робот-кресло из первого видео мог спокойно проехать перед машущим руками человеком.
P.S. А почему тесла от медведей задним ходом отъехала? автопилотам же вроде страх неведомstriver
31.10.2019 10:18P.S. А почему тесла от медведей задним ходом отъехала? автопилотам же вроде страх неведом
Это уже водитель сам сделал.
mSnus
Наконец-то они взяли в учителя опытных водителей! Так и притормаживать научатся по стоп-сигналам машины "через одну" — на просвет или по отражению на асфальте…