
Разработка роботов движется вперед: на днях японские робототехники опубликовали результаты разработки нового устройства. Это робот, способный взбираться по вертикальным лестницам, распознавая поручни и другие элементы, также он может карабкаться и по некоторым другим вертикальным поверхностям.
Четырехлапые роботы — довольно популярный тренд сейчас. Одними из первых такие устройства стали разрабатывать в Boston Dynamics. Четыре манипулятора дают роботу возможность сохранять равновесие и пересекать довольно сложные участки с неравномерным рельефом. Развивается не только «железо», но и программное обеспечение для роботов.

Тем не менее, с высокими препятствиями умеют справляться немногие представители мира роботов. В первую очередь, это роботизированные системы от Boston Dynamics и Honda. Проблема для роботов в сложности сохранения равновесия: при вертикальном передвижении центр тяжести механизма отклоняется назад и удержаться роботу очень сложно.
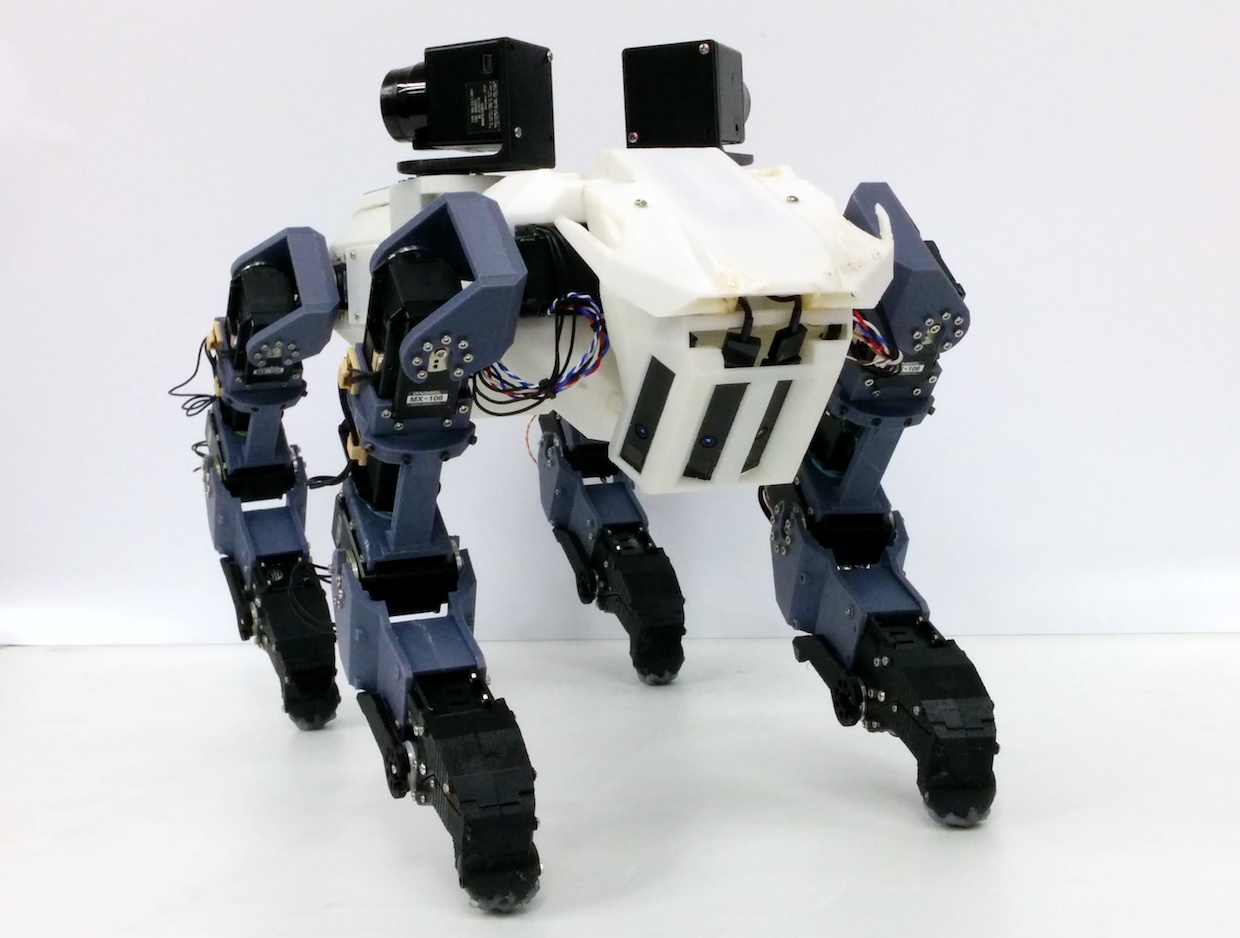
Японцы решили проблему относительно просто — они оснастили свое детище несложными захватами, которые совсем не мешают устройству ходить по ровной поверхности, но зато помогают удержаться при попытке подняться по вертикальной лестнице. У каждого из манипулятора-«ноги» пять степеней свободы. Манипуляторы оснащены датчиками давления, силы и касания. Есть специальные защелки, которые дают возможность закреплять манипулятор на лестнице во время передвижения.
Ориентироваться в пространстве роботу помогают лазерные дальномеры, которые расположены на спине, а также четыре камеры на голове. Датчики дают возможность определять расстояние до различных объектов. Информация со всех датчиков поступает в блок управления, где обрабатывается. Кроме того, специальные алгоритмы обеспечивают распознавание поручней и перекладин лестницы, показывая роботу, в какой точке можно ухватиться за опору.

Недостатком решения является то, что робота нужно обучать для каждой отдельно взятой лестницы. Тем не менее, японские робототехники надеются в скором будущем усовершенствовать свою разработку. Двигается робот относительно медленно (видео выше ускорено в 2 раза), так что придется решать и этот вопрос.
Если все получится, что появятся новые роботы, которые могут передвигаться практически по любым типам поверхности. Использовать их можно для разных целей — разведка на местности, поиск людей, пострадавших при землетрясениях или других катаклизмах, изучение промышленных объектов и т.п.
Комментарии (14)

Zmiy666
17.11.2019 17:27хм… а почему нельзя к этому нейросеть прикрутить… а то на каждой лестнице обучать это не айс… совсем. Да и скорость… у бостон динамикс есть динамика, а тут хромая нетрезвая черепаха. Думаю если б БД делали этого робота он бы взлетал на лестницу куда шустрее, подозреваю, что их двуногий робот при наличии рук и сейчас может залезть по лестнице в разы быстрее чем этот. А вообще без полимерных мышц мы нормальных роботов не получим, чем более сложные движения нужно делать, тем заметнее низкая эффективность сервоприводов. ((

solderman
17.11.2019 18:30Полимерные, или живые? Ведь надо просто прокачивать «голубую кровь», сдобренную кислородом и глюкозой (можно сразу АТФ) и, в случае боевого применения, можно даже не чистить от отходов, все равно активность скорее всего недолга.
Однако сервоприводы с появлением бесколлекторников с лёгким ротором стали очень эффективны.Zmiy666
17.11.2019 23:16мышцы все равно будут эффектинее.
А вот био или полимер — большой вопрос. Полимерные будут сильнее — это факт, поскольку они целиком будут состоять из полимерных волокон без биологической части, с сосудами и и биозащитой, то на единицу веса полимерные будут сильнее. Робота с полимерными мышцами можно убрать в сарай и забыть на пол года, после достать, зарядить и он снова будет бегать. С живыми клетками так не выйдет, даже пару часов без питания и робот перейдет в разряд зомби, не говоря уже о том, что для функционирования ему надо будет кучу систем, которые ему самому и ненужны — дыхательную, кровообращения, питания, удаления отходов… В этом плане гораздо проще сразу взять живую обезьяну (типа гориллы или шимпанзе) и чипировать ей мозг — по сути готовый биоробот со всем необходимым, даже нейросети встроенные и стоит сие будет в десятки раз дешевле… останется только подкорректировать обезьяну с помощью генной инженерии до нужных кондиций для более эффективного применения и норм.
Так что пока для именно роботов, без био — полимерные мышцы нужны как воздух. Сервоприводы… они все еще слишком большие, тяжелые и хрупкие — они плохо работают в динамике и плохо тянут динамические нагрузки. Впрочем зато они очень точные, но это скорее важно для промышленного робота-манипулятора.agat000
18.11.2019 08:30+2В природе паукообразные обходятся вообще без мышц. Чисто на гидравлике стали довольно успешным видом.
Zmiy666
18.11.2019 11:58+1там большая проблема в размерах. Материалы с увеличением размера не становятся прочнее и легче. Гидравлика может отлично работать у членистоногих, но стоит увеличить паука хотя-бы в 100 раз и его ноги сломаются под собственным весом, а если сделать их прочными, усилий не хватит для движения — добавить мощности — порвет обшивку, усилить обшивку — опять ломаются ноги так далее.
tvr
18.11.2019 12:33-1Ксеноморфы вроде тоже на гидравлике работали, пока их всех злобные земляне не отгеноцидили.
agat000
19.11.2019 07:29+1С массой да, проблема.
Но для небольшого робота вполне рабочая схема может получиться. Или большого, но для малой силы тяжести, как на Луне.
Просто обычная схема с сервоприводами получается очень уж дорогая — по мотору с редуктором на каждый сустав, для каждой степени свободы.
У паука один гидронасос, и простейшие регуляторы давления на суставах. И при этом отличная точность и свобода движений.

drWhy
17.11.2019 18:58+1БД тоже не сразу закувыркались. А начинали они с пуповиной, не было тогда подходящих источников питания и двигателей. Промежуточным этапом был назойливо громкий дизель. Главное — сделать первый шаг, улучшать/ускорять/оптимизировать всегда легче.

Slavik_Kenny
18.11.2019 15:05ИМХО наличие захватов не позволяет называть это ногами, скорее это лапы все-таки.
agat000
19.11.2019 07:39Ради интереса полез читать — что называют лапами, а что ногами. В общем — все не так однозначно.
Вики:
Основной признак лапы — это наличие мягких кожистых образований, называемых подушечками.
Обычно лапами называют стопы представителей медвежьих, собачьих, кошачьих, куньих и грызунов. Конечности приматов также являются лапами, но их традиционно называют руками (передние лапы) и ногами (задние лапы).
В общем, это ноги. Но применительно к технике лучше тогда использовать технические термины — манипуляторы, например.
tvr
Совсем чуть-чуть доработать и получится отличная полицейская собака.
solderman
451 градус по Фаренгейту- всё уже предначертано великими.
tvr
Ну слава богу, хоть кто-то распарсил.