
Лекции по курсу «Управление Техническими Системами» читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки» факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность!
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
В предыдущих сериях:
1. Введение в теорию автоматического управления.
2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (РЕГУЛИРОВАНИЯ).
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ.
Тема сегодняшней статьи:
3.2. Типовые звенья систем автоматического управления (регулирования). Классификация типовых звеньев. Простейшие типовые звенья.
Хочешь вкусить плодов познания? — Грызи гранит науки!

Понятие “типовые звенья” в теории управления техническими системами, в основном, связано с описанием САУ (САР) в переменных “вход – выход”, т.е. описание систем в передаточных функциях. Любую линейную САУ (САР) или линеаризованную САР можно структурно расчленить на простейшие элементы (звенья), соединенные между собой соответствующими последовательными, параллельными связями, местными и локальными обратными связями, сумматорами, сравнивающими устройствами и т.д.
Достигнуто общепринятое соглашение, что наиболее удобно расчленять структурную схему САР на звенья 1-го и 2-го порядков. Принято называть такие простейшие звенья типовыми.
С другой стороны, реальная линеаризованная (линейная) система состоит из набора отдельных узлов и агрегатов, соединенных соответствующими связями, причем порядок уравнений динамики вышеуказанных узлов и агрегатов может быть и выше второго. В этом случае звенья (узлы и агрегаты) САР можно классифицировать по их свойствам.
Различают 3 типа звеньев:
- позиционные;
- интегрирующие;
- дифференцирующие.
Существуют также особые звенья, которые будут рассмотрены позднее.
Учитывая, что передаточная функция линейного (линеаризованного) звена может быть записана как:
где: и — полиномы по степеням s, причем коэффициенты при низшей степени s в полиномах , равны 1, классификацию на типы звеньев можно объяснить видом полиномов или (что эквивалентно) видом коэффициентов в соответствующих уравнениях динамики звена.
Подробнее о передаточной функции см. здесь.
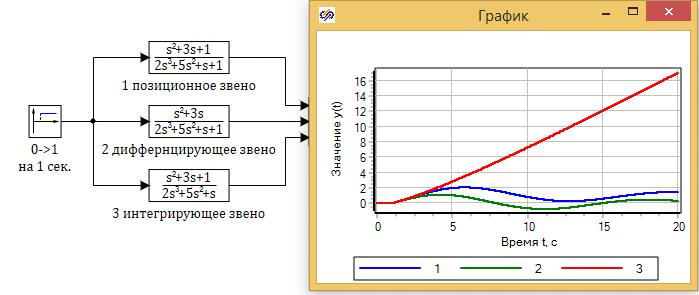
Позиционным звеном считают звено, в котором полиномы N(s) и L(s) содержат свободные члены (равные 1). Например:
или в уравнении динамики (x(t) – входной сигнал, y(t) – выходной):Из типовых звеньев (1-ого и 2-ого порядка) к позиционным звеньям относятся: идеальное усилительное звено, апериодические звенья 1-го и 2-го порядка, колебательное звено и форсирующее звено.
Дифференцирующим звеном считается звено, в котором полином L(s) содержит свободный член (равный 1), а полином N(s) не содержит свободного члена ().
Например:
Интегрирующим звеном считается звено, в котором полином N(s) содержит свободный член (), а полином L(s), не содержит свободного члена (). Например:
или в уравнении динамики:Из типовых звеньев к интегрирующим звеньям относятся идеальное интегрирующее звено, инерционно–интегрирующее звено.
Пример переходного процесса при единичном ступенчатом воздействи, на три разных звена приведенных выше:
3.2.1. Идеальное усилительное звено
Уравнение динамики каждого звена имеет вид: , т.е. уравнение не является дифференциальным, следовательно, данное звено является безынерционным.
Переходя к изображениям , получаем:
– уравнение динамики звена в изображениях.
Передаточная функция идеального усилительного звена:
АФЧХ не зависит от ?, поскольку:
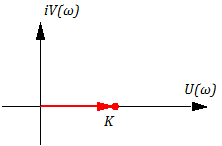
Рисунок 3.2.1 АФЧХ идеального усилительного звена
Годограф АФЧХ “вырождается” в точку: U(?) =K; V(?) =0;
A(?) ?modW(i?) =¦W(i?)¦=K =>
Lm(?)=20lgA(?) =20lgK; =>
?(?) = const = 0 т.е. фазового сдвига нет. Следовательно, данное звено является безынерционным, чисто усилительным звеном.
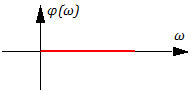
Рисунок 3.2.2 ФЧХ идеального усилительного звена
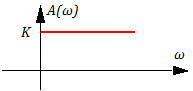
Рисунок 3.2.3 АЧХ идеального усилительного звена

Рисунок 3.2.4 ЛАХ идеального усилительного звена
Найдем весовую w(t) и переходную h(t) функции звена (подробнее см. здесь.)
Весовая функция:
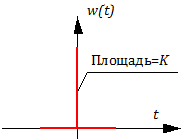
Рисунок 3.2.5 Весовая функция идеального усилительного звена
Переходная функция:

Рисунок 3.2.6 Переходная функция идеального усилительного звена
3.2.2. Идеальное дифференцирующее звено
Уравнение динамики звена имеет вид:
где: – постоянная времени.
Переходя к изображениям:
Уравнение динамики звена в изображениях:
Передаточная функция идеального дифференцирующего звена:
АФЧХ:
Графики годографа АФЧХ, A(?) и ?(?) имеют вид:

Рисунок 3.2.7 АФЧХ идеального дифференцирующего звена
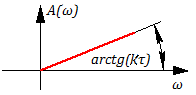
Рисунок 3.2.8 АЧХ идеального дифференцирующего звена
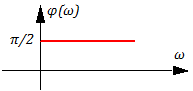
Рисунок 3.2.9 ФЧХ идеального дифференцирующего звена
Логарифмическая амплитудная характеристик ЛАХ::
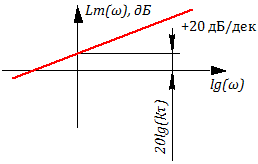
Рисунок 3.2.10 ЛАХ идеального дифференцирующего звена
Из рисунка 3.2.9 видно, что данное звено обеспечивает опережение по фазе на /2 (при любой частоте входного сигнала).
Чем выше частота единичного гармонического сигнала на входе в звено, тем выше амплитуда выходного сигнала в установившемся режиме.
Найдем весовую функцию звена:
Учитывая, что ?(t) имеет вид как на рис.3.2.11 (зависимость показана утрированно), а весовая функция пропорциональна производной от ?(t):
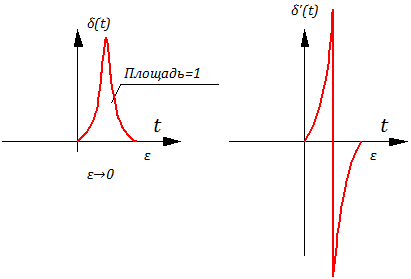
Рисунок 3.2.11 Качественный вид производной дельта-функции.

Рисунок 3.2.12 Весовая функция идеального дифференцирующего звена.
Найдем переходную функцию звена:
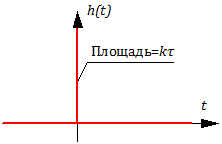
Рисунок 3.2.13 Переходная функция идеального дифференцирующего звена
Иногда идеальное дифференцирующее звено представляется в виде или . В последнем варианте коэффициент К имеет смысл постоянной времени.
3.2.3. Идеальное интегрирующее звено
Уравнение динамики такого звена имеет вид:
или в изображениях:Передаточная функция идеального интегрирующего звена:
АФЧХ:
Умножая числитель и знаменатель на i, получаем:Годограф АФЧХ имеет вид:

Рисунок 3.2.14 АФЧХ идеального интегрирующего звена
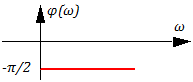
Рисунок 3.2.15 ФЧХ идеального интегрирующего звена
Данное звено всегда дает отставание по фазе на угол .
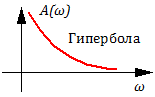
Рисунок 3.2.16 АЧХ идеального интегрирующего звена
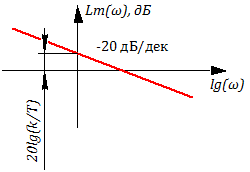
Рисунок 3.2.17 ЛАХ идеального интегрирующего звена
Найдем весовую функцию звена:
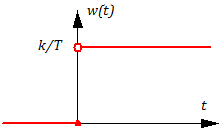
Рисунок 3.2.18 Весовая функция идеального интегрирующего звена
Найдем переходную функцию звена:

Рисунок 3.2.19 Переходная функция идеального интегрирующего звена
Примерами устройств, близкими к идеальному усилительному звену, можно считать: широкополосный электронный усилитель (приближенно), механический редуктор без учета инерционности и нелинейных эффектов, жесткую механическую муфту и т.д.
Примером идеального дифференцирующего звена можно считать тахогенератор:
где u(t) – напряжение на клеммах тахогенератора, ?(t) – угол поворота якоря (ротора) тахогенератора.
Примером идеального интегрирующего звена можно считать большинство электродвигателей (без учета инерционности якоря), где входным воздействием считать напряжение в обмотке возбудителя (двигателем постоянного тока), а выходным воздействием – угол поворота выходного вала.
Пример интегрирующего и дифференцирующего звена на основе конденсатора
Один и тот же технический элемент, с точки зрения теории автоматического управления, может выступать как в качестве интегрирующего, так и в качестве дифференцирующего звена.
В качестве примера интегрирующего звена можно рассмотреть конденсатор, где входным воздействием является ток, а выходным результатом является напряжение на клеммах конденсатора. Действительно, при малом токе и большой емкости конденсатора, в случае ступенчатого изменения тока с 0, мы получаем график напряжения, совпадающий по форме с переходной функцией интегрирующего звена. На рисунке 3.2.20 представлена такая модель, где ток ступенькой меняется на пятой секунде расчета.

Рисунок 3.2.20 Интегрирующие звено на базе конденсатора.
Если построить с помощью гармонического анализатора ЛАХ и ФЧХ, мы увидим, что угол наклона ЛАХ составляет -20 dB/dec, а угол сдвига фазы равен - или -90 градусов на графике (см. рис. 3.2.21)

Рисунок 3.2.21 ЛАХ и ФЧХ интегрирующего звена на базе конденсатора.
Тот же самый конденсатор, при определенных параметрах сети, может выступать в качестве идеального дифференцирующего звена, если в качестве входного воздействия подавать напряжение, а в качестве результирующей величины использовать ток в цепи.
Электрическая схема использования конденсатора в качестве дифференцирующего звена с гармоническим анализатором приведена на рисунке 3.2.22. На графиках гармонического анализатора видно, что угол наклона ЛАХ составляет 20 dB/dec, а угол сдвига фазы равен или 90 градусов на графике.

Рисунок 3.2.22 ЛАХ и ФЧХ дифференцирующего звена на базе конденсатора.
В следующей лекции будет уже атомный реактор.
Примеры моделей, использованные в данной лекции, можно взять в этом архиве.
P.S. Отдельное и большое спасибо Михаилу @Mike-M, за исправление ошибок в данной статье.







AVI-crak
Не надо атомных реакторов, достаточно несколько практических примеров из реальной жизни. Например расчёт обратной связи импульсного бп. Или что-то более сложное — например частотный преобразователь.
amartology
petuhoff Автор
Про импульсный блок питание есть вот здесь текст: habr.com/ru/post/509160