
Лекции по курсу «Управление Техническими Системами» читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки» факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность!
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
В предыдущих сериях:
1. Введение в теорию автоматического управления.
2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13
В этом разделе мы будем изучать частотные характеристики. Тема сегодняшней статьи:
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ
Будет интересно, познавательно и жестко.
3.1. Амплитудно-фазовая частотная характеристика: годограф АФЧХ, ЛАХ, ФЧХ
Определение: Частотными характеристиками называются формулы и графики, характеризующие реакцию звена (системы) на единичное синусоидальное воздействие в установившемся режиме, т.е. в режиме вынужденных гармонических колебаний звена (системы).

Рис. 3.1.1 – Схематическое представление синусоидального воздействия
Формула синусоидального воздействия может быть записана как:
Рисунок 3.1.2 – График представления синусоидального воздействия
— сдвиг фазы (нередко называют — фаза);
— амплитуда;
т.е. амплитуда на выходе звена(системы) и сдвиг фазы зависят от частоты входного воздействия x(t).
Используем показательную форму записи функции единичного гармонического воздействия и отклика на это воздействие (рис. 3.1.1):
Определим связь между передаточной функцией и гармоничным воздействием, пользуясь показательной формой.
Рассмотрим звено уравнение динамики которого имеет следующий вид:
В показательной форме:
Передаточная функция:
Запишем в показательной форме используя соотношения 3.1.1:
Подставим эти соотношения в (3.1.1) получим:
Поскольку (амплитуда на выходе звена(системы) и сдвиг фазы зависят от частоты входного воздействия), то можно записать:
если вспомнить, что в преобразования Лапласа , то:
Получаем выражение для передаточной функции
— Амплитудно-фазовая частотная характеристика (АФЧХ)
Иногда называют частотной передаточной функцией.
Модуль АФЧХ= тождественно равен амплитуде выходного сигнала:
Сдвиг фазы выходного сигнала:
Обычно АФЧХ изображается на комплексной плоскости. Формулы (3.1.6) и (3.1.7) позволяют изобразить в полярных координатах
Так же можно изображать в традиционных декартовых координатах:
Если использовать для представления W(s) форму W(s)=K·N(s)/L(s), где L(s)- полиномы по степеням s, (причем свободные члены равны 1), а К – общий коэффициент усиления звена (системы), то
Сдвиг фазы можно определить по виду многочленов и (см. формулу (3.1.9)) т.е. как разность фаз (аргументов) числителя и знаменателя:
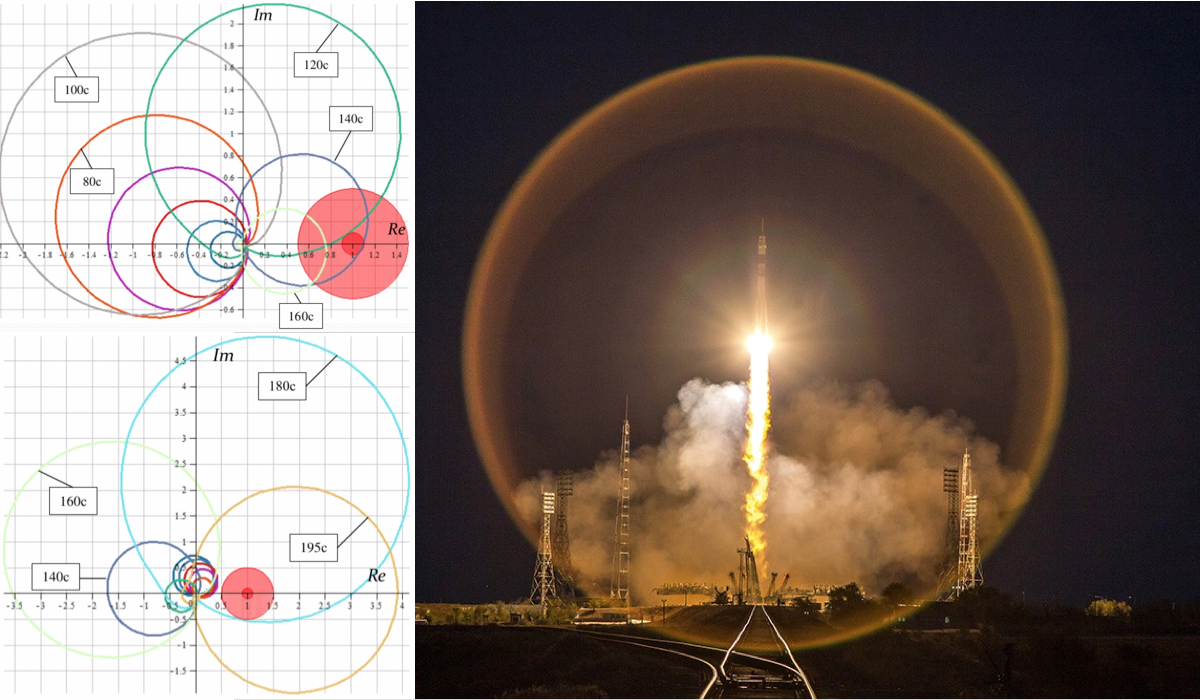
Постоим АФЧХ для «абстрактного» звена (системы) с передаточной функцией:
Подставляя в формулу различные значения , получаем набор векторов, на комплексной плоскости
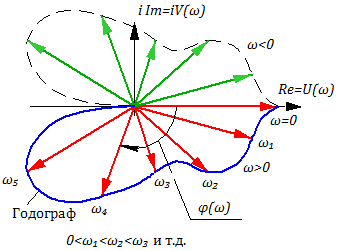
Рисунок 3.1.3 – Годограф абстрактного звена.
Рассмотрим действительную и мнимую части полученных векторов Из рисунка 3.1.3 видно, что:
Амплитуда и сдвиг фазы рассчитываются для векторов, соответствующих положительным частотам и лежащих в 4 квадранте по формулам:
В общем случае для любых углов сдвига необходимо учитывать переход между квадрантами на плоскости. Тогда формула принимает вид:
где:
j = 0, 2, 3, 4..., если вектор в I и IV квадрант;
j = 1, 3, 4, 4..., если вектор в II и III квадранте.
Во всех технических системах отклик системы, как правило, отстает от входного воздействия, то есть сдвиг фазы всегда отрицательный. Исходя из формулы 3.1.10, степень полинома L(s) выше, чем полинома N(s). Поскольку обычно степень полинома L(s) выше, чем полинома N(s), то с увеличением частоты на входе в звено (в систему) сдвиг фазы обычно отрицателен, т.е. сигнал на выходе звена еще больше отстает по фазе от входного сигнала при увеличении частоты.
В предельном случае, если частота растет до бесконечности, мы можем вообще не получить выходного воздействия. Обычно при ?> ? величина амплитуды на выходе звена стремится к 0, то есть lim A(?>?) = 0.
при замене на имеет зеркальное изображение.
Анализируя годографы АФЧХ при > 0 (сплошная линия на рисунке 3.1.3) и при < 0 (пунктирная линия), видим, что:
– четная функция, следовательно график симметричен относительно оси ординат, а
– нечетная функция и ее график центрально-симметричен относительно начала координат.

Рисунок 3.1.4 – «Зеркальная» симметрия относительно оси ординат.

Рисунок 3.1.5 – «Центральная» симметрия относительно начала координат.
Кроме анализа свойств звена (системы) по годографу АФЧХ, широкое распространение получили анализ логарифмической амплитудной характеристики (ЛАХ) и фазочастотной характеристики (ФЧХ).
ЛАХ определяется как Lm(?)=20lgA(?).
Поскольку зачастую удобнее использовать десятичные логарифмы (lg), чем натуральные(ln), в теории управления (также и в акустике) значительно чаще используется специальная единица – децибел (1/10 часть Бела):
+1Бел – единица, характеризующая увеличение в 10 раз.
+1дБ (децибел) – соответствует увеличению в раз.
В формуле Lm(?)=20lgA(?) величина Lm(?) измеряется также в децибелах. Происхождение множителя 20 таково: A(?) – амплитуда, линейная величина, а мощность — квадратичная величина (например, напряжение в сети измеряется в Вольтах, а мощность () пропорциональна квадрату напряжения, поэтому в формуле для Lm(?) стоит множитель 20 (чтобы привести ЛАХ (Lm(?)) к традиционной мощностной характеристике).
Если больше на 20 дБ, то это означает, амплитуда больше амплитуды в 10 раз,
Окончательно: Lm(?)=20lg¦W(i?)¦= 20lgA(?)
Из этого следует, что +1 децибел (+1 дБ) соответствует увеличению амплитуды в раз (очень малая величина); -1 дБ – уменьшение амплитуды в раз.
Графики A(?) и ?(?) имеют вид:

Рисунок 3.1.6 – пример графика АЧХ

Рисунок 3.1.7 – пример графика ФЧХ
Учитывая, что “?” обычно изменяется на порядки и значение A(?) – также на порядки, график Lm(?) строится, фактически, в логарифмических координатах, т.е. Lm(?) =Lm(lg(?)), например:

Рисунок 3.1.8 – пример графика ЛАХ
Наклон (– 40 дБ/дек) соответствует уменьшению амплитуды в 100 раз при увеличении частоты в 10 раз.

Рисунок 3.1.9 – пример графика ЛФЧХ
Рассмотренные характеристики Lm(?), то есть ЛАХ и ФЧХ имеют широкое распространение при анализе динамических свойств звена (системы), например, при анализе устойчивости САР (см. раздел “Устойчивость систем автоматического управления”).

Рисунок 3.1.10 – пример ЛАХ и ФЧХ для сложной системы
Пример 1
В качестве примера построим АФЧХ для демпфера, модель которого разобрана в этой статье.... Добавим на схему блок «Построение частотных характеристик», в качестве входа возьмем возмущающее воздействие, в качестве выхода — положение положение груза. Для наглядности иллюстрации примем в качестве выхода положение в миллиметрах (х1000), поскольку модель у нас размерная и результат получается в метрах уже достаточно маленьким примерно 0.004 метра. см. рис. 3.11

Рисунок 3.1.11 Схема для построения частотных характеристик.
Параметры блока «Построение частотных характеристик» приведены на рисунке 3.1.12, для иллюстрации зависимости АЧХ и ЛАХ. Результат работы блока — график с выбранными параметрами — изображен на рисунке 3.1.13:

Рисунок 3.1.12 – Параметры блока «Частотные характеристики».

Рисунок 3.1.13 – Частотные характеристики в АЧХ, ЛАХ, ФЧХ в линейном масштабе по ?.
Анализ графика в линейном масштабе по ? чаще всего не очень удобен, поскольку весь график собирается в узкой области, а дальше график абсолютной амплитуды практически сливается с 0. Если мы хотим исследовать частоты хотя бы до 1000 Гц, мы увидим практически вертикальные и горизонтальные прямые. Изменения масштаба шкалы АЧХ и ? на логарифмический дает возможность лучше исследовать частотные характеристики (см. рис. 3.1.14).
На рисунке 3.1.14 представлены частотные характеристики демпфера в логарифмическом масштабе и иллюстрация соотношения между абсолютной величиной амплитуды АФЧХ и ЛАХ в децибелах.
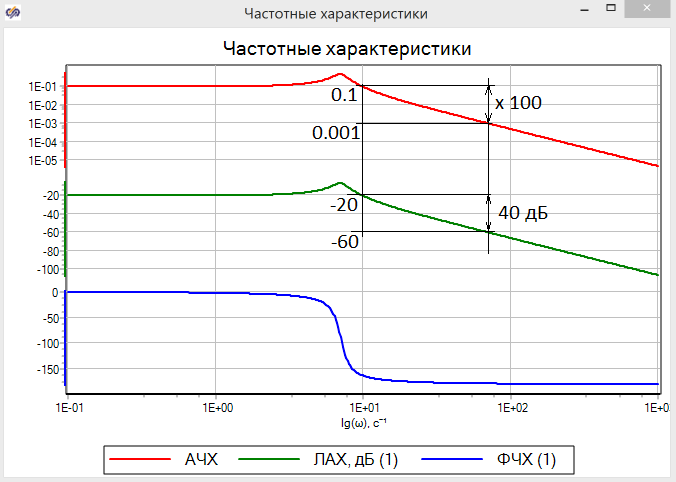
Рисунок 3.1.14 – Частотные характеристики в АЧХ, ЛАХ, ФЧХ в логарифмическом масштабе по ?.
Пример 2
Постоим частотные характеристики для чуть более сложной модели, а именно — для гидравлического демпфера, рассмотренного в предыдущей лекции....
Для начала посмотрим на модель в виде блоков.
Модель, подготовленная для анализа, представлена на рисунке 3.1.15. В отличие от исходной модели, описанной ранее, входное воздействие задается блоком «ступенька» с скачком с 0 до 1 на 10 секунде расчёта. В блоке «линейная функция» происходит пересчет сигнала «ступенька»:
0 — соответствует 200 бар в камере (конечное состояние в предыдущем примере)
1 — соответствует 400 бар в камере.
Это сделано для того, чтобы можно было подавать синусоидальный сигнал и не получать отрицательное давление в камере плунжера. Также для наглядности графика мы усиливаем выходное перемещение, переводя его из метров в миллиметры.
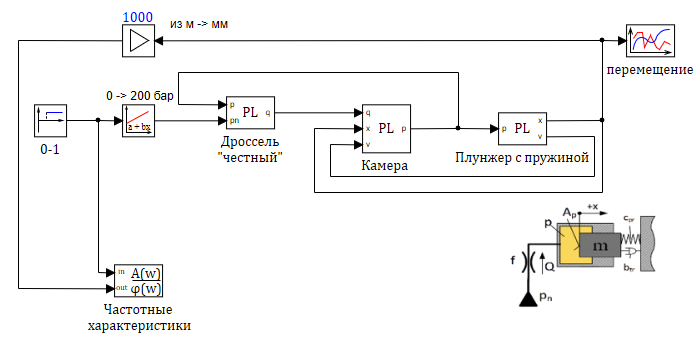
Рисунок 3.1.15 – Модель гидравлического демпфера.
Частотные характеристики, получаемые в конце расчёта, приведены на рисунке 3.1.16. Видно что характеристики отличаются от простого пружинного демпфера (сравните с 3.1.14)

Рисунок 3.1.16 – Частотные характеристики гидравлического демпфера
Блок "Построение частотных характеристик" осуществляет расчет характеристик для линеаризованной модели в окрестности заданной точки. Это означает, что частотные характеристики системы в разные моменты времени могут отличаться для нелинейных моделей. Например, в нашем случае характеристики в начале расчёта будут отличаться от характеристик, полученных в конце расчёта.
Для подробных и нелинейных моделей, блок «Построение частотных характеристик» может не работать из за наличия разрывов и нелинейностей в модели. Как например, для «точной» модели демпфера, которую мы проверяли в предыдущей статье. В этом случае возможно построить частотные характеристики непосредственно моделированием, путем подачи синусоидального сигнала с разной частотой и измерения отклика. В SimInTech для этого используется блок «Гармонический анализатор», который подключается ко входу модели и генерирует синусоидальное воздействие. В этот же блок направляется отклик системы, и производится вычисление необходимых параметров для построения различных характеристик системы, которые можно вывести на графики с помощью блока «фазовый портрет».
Модель гидравлического демпфера, собранного из библиотечных блоков SimInTech, представлена на рисунке 3.1.7

Рисунок 3.1.17 – Модель гидравлического демпфера для расчёта частотных характеристик.
Расчеты с моделью показывают, что при сохранении общего вида графиков значения, полученные для «подробной модели», отличаются от линеаризованной модели (см. рис. 3.18 — 3.19)
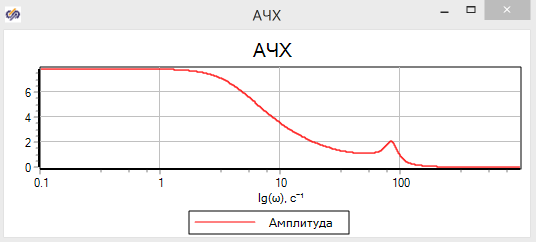
Рисунок 3.1.18 – АЧХ подробной модели привода, полученная прямым моделированием.

Рисунок 3.1.19 – ЛАХ подробной модели привода, полученная прямым моделированием.
Использование прямого моделирования для получения характеристик является более надежным способом и работает не только с линейными моделями, но также может быть применимо для построения характеристик некоторых реальных объектов, если их можно подключить к среде моделирования и воздействовать в реальном режиме времени. Однако затраты на вычисления значительно будут больше. Например, для получения характеристик демпфера пришлось выполнить процесс в 40 000 секунд модельного времени, на обычном компьютере это заняло порядка 35 минут. График процесса перемещения плунжера в процессе вычисления характеристик приведен на рисунке 3.1.20.

Рисунок 3.1.20 – Перемещения плунжера в процессе моделирования.
Блок «Гармонический анализатор» имеет выходы:
Re(w*t) – текущее значение действительной части амплитудно-фазовой частотной характеристики исследуемой системы;
Im(w*t) – текущее значение мнимой части амплитудно-фазовой частотной характеристики.
Это позволяет построить годограф исследуемой системы с помощью фазового портрета. (см. рис. 3.1.21)

Рисунок 3.1.21 – Годограф системы гидравлического демпфера.
Модели, использованные для иллюстрации в лекции можно взять здесь...
Продолжение следует.
ValeriyS
Статья оставляет тягостное впечтление. В предыдущей статье частотная характеристика объекта уже приведена в виде, принятом для преобразования Лапласа. Казалось бы один шаг, и вот оно — аналитическое решение отклика системы на входной сигнал в виде ступеньки с последующим линейным ростом. Но — нет, многочасовре численное моделирование системы, состоящей из трех нулей/полюсов.
Надеюсь в следующей статье этого цикла будет показано, что вместо многочасового расчета моделирование отклика подобной (простой) системы делается чисто аналитически, используя преобразование Лапласа?
Годограф — никогда не слышал о таком. Не представляю, где это может использоваться. Единственно, что приходит на ум — графическое представление критерия устойчивости Найквиста. Но там полярный плот сроится для системы с замкнутой контроллером обратной связью.
petuhoff Автор
Согласен с оценкой, просто до этого все жаловались на обилие формул без примеров, очень сухо как будто читаешь справочник, вот я и решил добавить примеров с графиками, для визуального разнообразия. Но тоже не зашло :))
netricks
В статье использован термин "прямое моделирование". А где-то раскрыто, что это такое?
petuhoff Автор
В этом случае возможно построить частотные характеристики непосредственно моделированием, путем подачи синусоидального сигнала с разной частотой и измерения отклика. Непонятно?
netricks
Мне, как человеку немного искушённому в ТАУ понятно, хотя и я на мгновение задумался, имелся в виду в качестве входного синусоидальный сигнал или же белый шум. А вот человеку с улицы очень даже может быть непонятно.
Arastas
Вероятно, вы заблуждаетесь. Для критерия усточивости Найквиста годограф строится для разомкнутого контура. Собственно, годограф разомкнутого контура плюс знание числа неустойчивых полюсов разомкнутого контура позволяют оценить устойчивость замкнутой системы.
Вообще годограф используется нередко. Это некоторые показатели качества и запас устойчивости по модулю, обобщающий запасы по фазе и амплитуде. Это анализ устойчивости линейной системы с нелинейностью в обратной связи (форма Лурье, к которой сводятся некоторые инженерные задачи) через классическую абсолютную устойчивость и/или критерий Попова. Это так, что на вскидку вспомнил. А, ну ещё строгую положительную вещественность можно на годографе смотреть, это для анализа пассивности систем и в адаптивном управлении может быть интересно.
ValeriyS
Точное число неустойчивых полюсов знать нет необходимости. Достаточно и одного такого полюса, чтобы система стала неустойчивой. А два их там или три неважно, система не будет работать.
Я ровно это и хотел сказать — что полярный плот имеет смысл для системы в совокупности с контроллером для построения замкнутой по обратной связи системы управления. Такой плот для объекта управления без соединённого с ним контроллера мало полезен.
Про слово «годограф» я, видимо, погорячился. Просто никогда не читал статей или книг на эту тему на русском языке, мне удобнее на английском.
Arastas
Вы что-то не то говорите. Разомкнутая система (open loop) естественно может иметь неустойчивые полюса. Задача стабилизации — построить такой регулятор, чтобы замкнутая система (closed loop) была усточивой, то есть не имела неустойчивых полюсов. Судить об устойчивости замкнутой системы можно по частотному годографу (Nyquist plot) разомкнутой системы (объект+регулятор). Для правильного использования критерия Найквиста нужно знать число неустойчивых полюсов разомкнутого контура (open loop).
Речь идёт о Nyquist plot.
ValeriyS
Критерий Найквиста исключительно удобен как раз потому, что он работает даже для систем, непредставимых в виде конечного числа нулей/полюсов. Простейший пример такой системы — плант с чистой задержкой: W(s) = exp(s*𝜏).
Если говорить о строгой формулировке критерия Найквиста для системы, представимой нулями/полюсами, то там фигурирует только разница между количеством её положительных нулей/полюсов.
Ниже я буду отвечать на вопрос об аналитическом решении через преобразование Лапласа. Там сообщается, что система, выраженная в виде произведения нулей/полюсов, может быть представлена и в виде суммы членов первого/второго порядка.
Любой исходный положительный полюс после такого преобразования останется в виде аддитивного члена. Обратное преобразование Лапласа сделает его экспоненциально возрастающим, т.е. неустойчивым при любых (практически приемлемых) манипуляциях с контроллером.
Arastas
Согласен.
Такая передаточная функция не имеет ни нулей, ни полюсов. Если вы имели ввиду что-то другое, то лучше написать подробнее. Или вы опять говорите про замкнутый контур вместо разомкнутого?
И снова вы заблуждаетесь. Речь идёт о разнице между числом положительных (по вещественной части) нулей и полюсов не передаточной функции разомкнутого контура, скажем, G(s), а новой передаточной функции F(s)=1+G(s). Так как нули F(s) это полюса замкнутой системы, то нас для устойчивости интересует только тот случай, когда положительный нулей у F(s) нет, то есть замкнутая система устойчива. И тогда речь идет только о положительных полюсах G(s).
Итого, в формулировке критерия Найквиста число положительных нулей передаточной функции разомкнутого контура G(s) не участвует.
Часть про аддитивность и обратное преобразование я вообще не понял, к чему относится и при чём тут. Вы про замкнутый контур или разомкнутый?
ValeriyS
На этом откланиваюсь. На конкретные вопросы готов ответить, на абстрактные — увольте.
Arastas
Забавно. Вы вроде как считаете, что хорошо разбираетесь не только в dsp, но и в теории управления, но при этом умудрились грубо ошибиться в трёх сообщениях подряд. А когда вам на это указали, то "откланиваетесь". Ну-ну.
petuhoff Автор
А можно ссылку на аналитическое решение аналитическое решение отклика системы на входной сигнал в виде ступеньки с последующим линейным ростом? Можно на английском. В текущих лекциях у меня этого нет. Дальше идет разбор типовых звеньев.
netricks
Интегратор :).
ValeriyS
Пример полного процесса решения от дифференциального уравнения до аналитического решения, даже линейный рост в качестве входного воздействия присутствует:
www.youtube.com/watch?v=AtuYU5VZAl4
Если коротко, то:
1. Разлагаем произведение нулей/полюсов планта на частичные суммы
2. Делаем преобразование Лапласа для входного воздействия, в нашем случае это сумма от Лапласа ступеньки и линейного роста
3. Приравниваем п.1 = п.2 и решаем алгебраически
4. Делаем обратное преобразование Лапласа и получаем аналитическое выражение для отклика системы как функции времени.
petuhoff Автор
спасибо!