
Дело было вечером, делать было нечего (с)
Достаточно давно я приобрёл квадрокоптер DJI Spark, много снимал всевозможных видео, над водой (один раз утопил его, купил такой же) и над другими, более безопасными поверхностями.
В один прекрасный день, когда делать было практически нечего, я обратил своё внимание на воздушный винт сабжа. Он мне показался каким-то не вполне правильным в плане геометрии и я подумал, а что если сделать свой воздушный винт, который был бы лучше родного от DJI.
Логика подсказывает, что необходимо выполнить серию расчётов разных винтов. Но как и где взять отправную точку и что должно меняться в серийных расчётах?
Воздушный винт представляет из себя конструкцию, состоящую из одной или более лопастей. Лопасть состоит из набора профилей, установленный под определённым углом.

Взяв коптер и вооружившись линейкой я совершенно однозначно смог определить, что диаметр воздушного винта составляет примерно 117 мм.

Один параметр мы знаем. Второе что необходимо определить - это обороты воздушного винта, при которых коптер висит (не меняет свою высоту). Сделать это не сложно оптическим тахометром с источником постоянного света (в данном случае это был фонарик от телефона).

Ну и третье, что доступно обывателю - определение тяги воздушного винта при висении коптера, а именно этот режим работы основной при использовании мной данного летательного аппарата. Зная массу DJI Spark (320г) и взяв за основу, что DJI молодцы и поместили центр тяжести в геометрический центр коптера, определим тягу одного винта как четверть от взлётной массы летательного аппарата=80гр.
В принципе, этих данных достаточно для начала работы. Но возникает вопрос, какой профиль выбрать и какие углы установки у каждого из профилей должны быть?
На первый вопрос нам поможет ответить замечательный сайт с базой данных профилей, откуда и был выбран профиль ah79100c-il. Почему он...просто понравился, а ещё у него неплохое соотношение Cy к Cx.
Со вторым вопросом сложнее. Если у нас безграничные вычислительные мощности, то можно построить лопасть из 10 профилей и для каждого профиля задать по 20 вариантов установки углов. В таком случае необходимо будет рассчитать 1.024e+13 вариантов лопастей. Согласитесь, это что-то за гранью разумного. Вариант второй - взять штатную лопасть воздушного винта и измерить углы. Или третий вариант - вычислить, скажем так, начальные условия лопасти воздушного винта.
Для этого я воспользовался книжкой, которую написал Борис Николаевич "Аэродинамический расчёт вертолётов".
Благодаря чему удалось создать документ в excle для определения параметров воздушного винта (больше интересует форма и углы установки профилей).
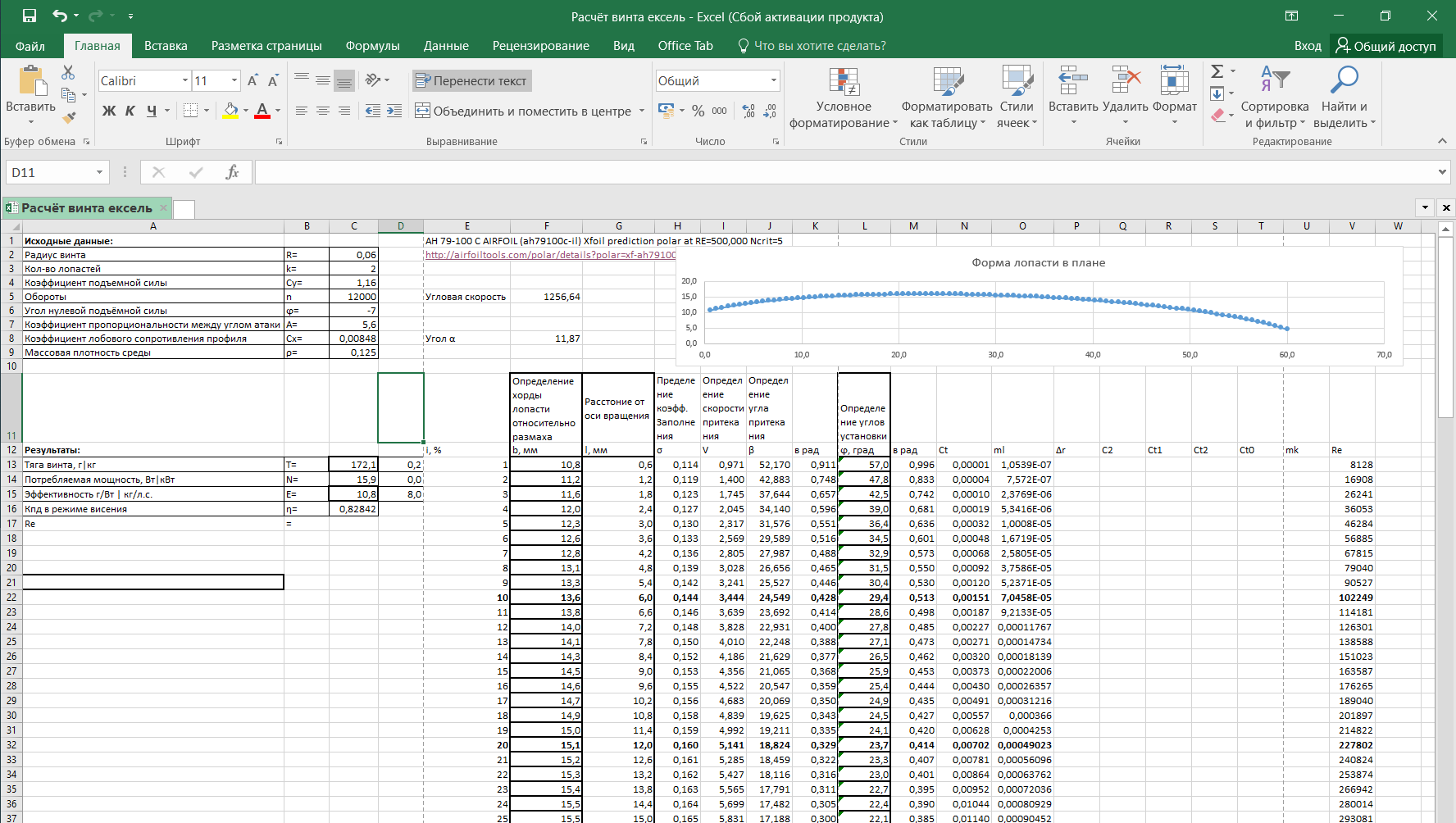
Немного пришлось "подкрутить" - коэффициенты в формуле для определения формы лопасти в плане (при виде сверху), лопасть изначально получалась очень узкая. И, тем не менее, результат расчёта очень далёк от реальности. В частности, получить 172г тяги, затратив 15 Вт мощности - что-то нереально и за гранью фантастики (эффективность 11 г/Вт). Поправка - в указанных габаритах и оборотах. Есть примеры из жизни, где получают эффективность воздушного винта порядка 133 г/Вт.
Вот теперь отправные углы для построения лопасти получены и нужно скорее строить лопасть воздушного винта, ну и винт потом. Проводить расчёты буду в программке Star-CCM, в ней и строю параметрическую 3D модель воздушного винта.

Теперь можно запускать расчёт. Я задал по несколько значений углов для каждого профиля и, всё равно, количество вариантов очень много (4608 вариантов). Расчёт был запущен, я сидел и ждал, точнее жил и ждал, потому как процесс не из самых быстрых, особенно учитывая, что расчёт проводил на домашнем ноутбуке.

Через некоторое время расчёт я остановил по причине бессмысленности его продолжать. Дело в том, что, судя по графикам, параметры лопасти стали смещаться в сторону увеличения тяга и уменьшения эффективности от искомых значений, что меня не устраивало.

Это неплохо) Я выбрал наиболее подходящий график и, соответственно, относящиеся к нему углы установки профилей лопасти и построил новую таблицу, уже с меньшим количеством вариантов. Чем дальше от центра вращения, там шаг меньше и больше вариантов, подумал я и получилась такая таблица.

Спустя неделю, а именно столько понадобилось моему хиленькому ноутбуку для расчёта всех вариантов я смог провести анализ полученных результатов и выбрать лучший из них. Тут стоит сказать, что сетка была не самая наилучшая. Чуть точнее сетка и расчёт занял месяц или ещё больше).
Вот такая лопасть показала наилучший результат после расчётов. Да, кривая, да, необходимо будет поправить, чтобы красивая была и провести окончательный расчёт.

Правка заключается в изменениях углах установки, чтобы лопасть смотрелась целостно, без резких перегибов.

Подобные картинки (только с лучшим разрешением) любят вставлять во всякие отчёты. Выглядит красиво и прекрасно, на этом всё))

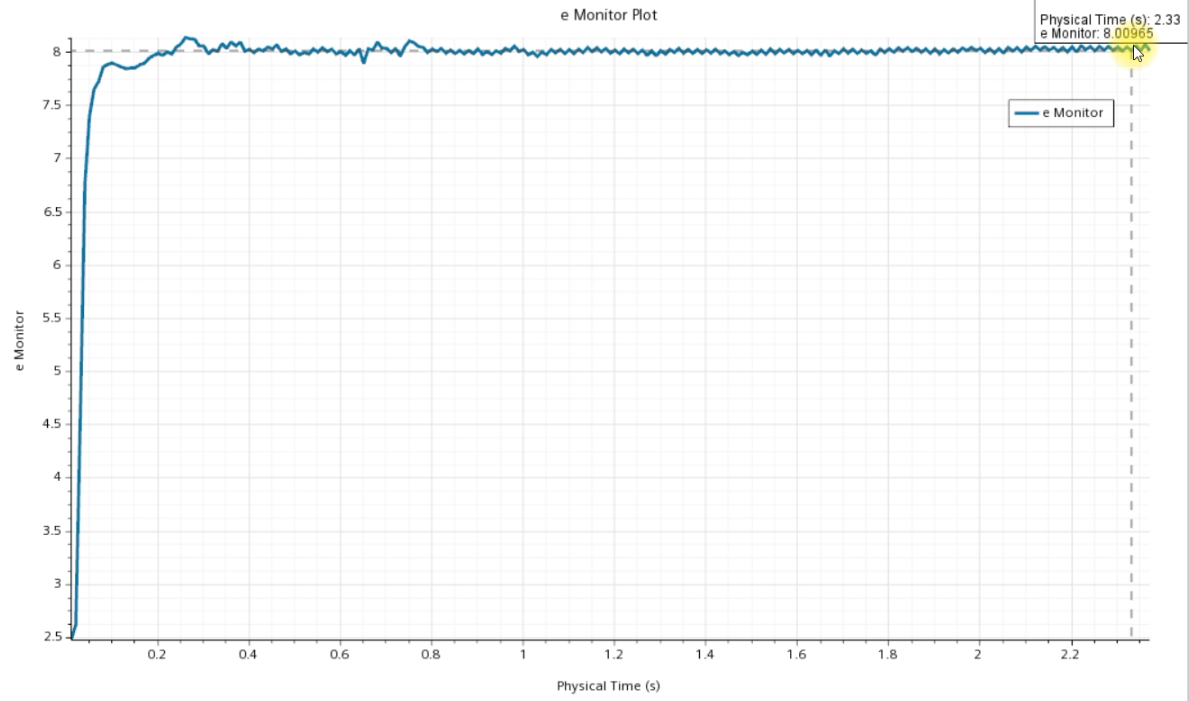
Графики сходимости эффективности:
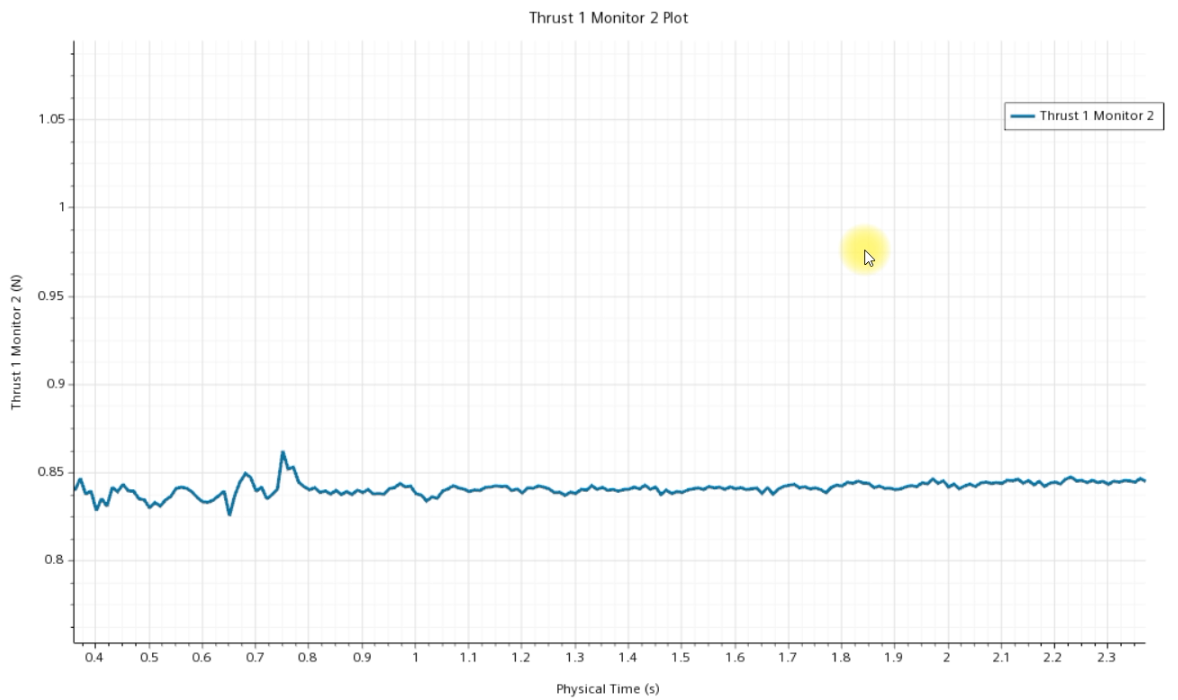
и тяги рассчитанного воздушного винта.
На этом расчёт воздушного винта окончен. Теперь осталось его изготовить и проверить на практике. Изготавливать я его методом 3D печати на фотополимерном принтере. Но, для этого необходима 3Д модель. Я её нарисовал в SW на основе рассчитанных данных. Получилось так. На изображении "комплект" лопасть правого вращения и лопасть левого вращения. Всего необходимо напечатать 4 таких комплекта.

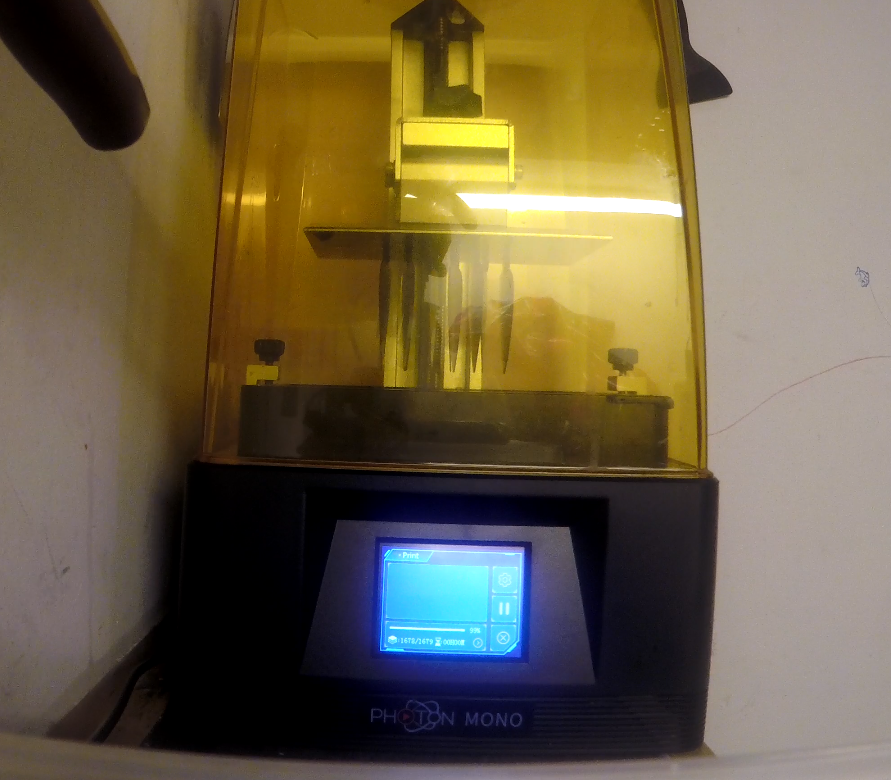
Процесс печати лопастей.
Сборка воздушного винта.
Тут всё предельно просто, берём родной воздушный винт, выбиваем оси и демонтирую лопасти. Устанавливаю самодельные лопасти, запрессовываю оси. На фото ниже уже собранный воздушный винт с самодельными лопастями.

Собираю три оставшихся воздушных винта и можно приступать к экспериментам.

Методика испытаний следующая:
Заряжаю АКБ.
Устанавливаю воздушный винт, подвергающийся испытанию.
Взлетаю на высоту 2 метра равноудалённо от стен.
Жду того момента когда коптер начнёт сигнализировать о низком уровне заряда АКБ и начнёт снижаться на посадку.
Посадку отменяю и уже на высоте 0,3 метра жду когда он принудительно приземлится из-за невозможности продолжать полёт.
Время между началом п.3 и концом п.5 и есть время полёта для сравнения воздушных винтов. А так как у меня есть 2 АКБ, то для каждого воздушного винта я проведу по 2 испытания.
А теперь результаты:
Родные воздушные винты
13 мин 21 сек (801 сек) - первая АКБ
13 мин 35 сек (815 сек) - вторая АКБ
Самодельные воздушные винты
14 мин 14 сек (854 сек) - первая АКБ
14 мин 33 сек (873 сек) - вторая АКБ
Прирост времени полёта.
Первая АКБ 6,6%
Вторая АКБ 7,1%
И немного выводов:
Удалось повысить эффективность воздушных винтов на 7%.
Можно выиграть ещё немного, за счёт изготовления жёстких винтов (напечатанные, всё таки, "мягковаты"). Об этом в следующей части, если будет интересно.
-
При печати на лопасти остаются ступеньки из-за недостаточно разрешения 3D принтера, если их убрать будет лучше.

Видеоверсия (немного другое, отличное от текстовой версии, представление информации): Ссылка
Скачать файл для печати можно по ссылке:
Дополнения к статье:
-
Спрашивали в комментариях на счет массы винтов.

Масса родного винта

-
Вопрос, касаемо скорости вращения.

Скорость вращения винтов при висении несколько меньше.
Комментарии (71)

vconst
04.07.2022 09:43+1А что с вибрациями при сьемке видео? «Желе» не получается?
Если, по результатам испытаний, все будет ок — можно у вас будет заказать кастомные лопасти для других дронов DJI? :)
Sergiv Автор
04.07.2022 09:58Вибраций нет вообще. При печати очень стабильный результат получается.
Для каких других?)
vconst
04.07.2022 10:02Даже с учетом того, что лопасти мягкие и есть ступеньки — все равно нет вибраций?
Удивительно!
Как же тогда китайцы делают лопасти, от которых дрон трясется?.. Талант, не иначе
Других — например Mavic Pro 1 версии. Оригинальных на него уже не найти, китайские трясутся…Sergiv Автор
04.07.2022 10:05Иногда слышно, что появляется флаттер (это из-за гибкости). Вибрации, в основном, появляются тога, когда одна лопасть тяжелее другой или центры тяжести одинаковых по массе лопастей отличаются. Возможно, при литье серийных лопастей проявляются неточности и лопасти разной массы получаются и собираются в один воздушный винт. Ну, или вал мотора кривой ))
vconst
04.07.2022 10:06С валом моторов все нормально, а вот китайские винты — это печаль. Для фото сойдет, а видео уже не очень :(
Sergiv Автор
04.07.2022 10:15Почему оригинальных не найти ? В продаже нет? Чтобы Делать лопасти - нужен коптер, в качестве отправной точки, а у меня его нет. Был spark - сделал.
vconst
04.07.2022 11:34Дрон не самой новой модели, официально уже не продается ни сам дрон, ни расходники в нему.
Если нужен дрон — то можно поспрашивать в чатах дроноводов, они ВЕЗДЕ есть :) В любом городе :)

celladon
04.07.2022 09:57+2Похожие эксперименты по подбору пропеллеров для спарка проводил в прошлом году. Но подбором из имеющихся. Самыми подходящими оказались пропеллеры от Mavic Mini. Время висения на них составило 14м38с при батареи 98-13%. На родных пропеллерах и моторах 12м03с батарея 99-14%. Правда в моем случае еще и моторы не родные. Что тоже прибавило время висения около 1мин.

Кстати обороты, ток для каждого двигателя и много других параметров можно посмотреть в логах, которые скачиваются с самого дрона.
Sergiv Автор
04.07.2022 09:59Ух ты, про логи не знал, можете краткий ликбез дать как скачать их ?

DiKey
05.07.2022 15:03Я когда изучал эффективность пропеллеров, смотрел потребление тока каждого двигателя. Потом менял пропеллеры на паре двигателей, и смотрел, как изменилось потребление на этлй паре.
Sergiv Автор
05.07.2022 15:04Чтобы полностью изучить эффективность необходимо не только ток знать, но и мощность с тягой. Вот тогда полная картина будет.


RusikR2D2
04.07.2022 09:59+9У вас получился винт, оптимизированный для "нулевой" скорости (висение). Ваш коптер теперь будет медленнее летать, медленнее набирать высоту, скорее всего, "тупее" реагировать на управление и хуже держать ветер. Также могут появиться вибрации (контроллер настроен именно на то соотношение тяги-оборотов, у вас же оно стало другим)
Любой винт - это "компромисс" между тягой, скоростью, потребляемой "мощностью" и КПД. Создатели вашего коптера сделали вот так. Вы сделали иначе. Если нужно долго висеть, ваш винт оправдан. Если нужно "интересно" летать, то не очень.В идеале, конечно, к коптеру прикладывать несколько разных винтов и сделать возможность переключения настроек - одни для тех кто хочет летать быстро, другие для тех кто хочет долго висеть.
Если вы сделаете винт больше диаметром, то скорее всего удастся еще больше увеличить время висения (зависит уже от моторов - нужно будет убавить обороты, а тогда может не хватить уже мощности).
vconst
04.07.2022 10:04+1будет медленнее летать, медленнее набирать высоту, скорее всего, «тупее» реагировать на управление и хуже держать ветер
Звучит грустно…
Автор! Делай полные испытания! Тема интересная ))
Sergiv Автор
04.07.2022 10:12+2У вас получился винт, оптимизированный для "нулевой" скорости (висение).Так и есть. Другие режимы количественно я не могу измерить.
На счёт тупее реагировать - не согласен. Если тупее реагировал бы, то была бы проблема с управлением при висении на месте. Этого не наблюдается.
Если нужно "интересно" летать, то не очень.Это я проверю в следующей статье ;)
Основной режим коптера для съемки - это всё таки режим висения. На него и рассчитываю.
Если вы сделаете винт больше диаметром, то скорее всего удастся еще больше увеличить время висения (зависит уже от моторов - нужно будет убавить обороты, а тогда может не хватить уже мощности).Если я так сделаю, то лопасти будут цепляться друг за друга. А так да, чем больше диаметр, тем выше эффективность (но и тут границы существуют).
vconst
04.07.2022 10:15Основной режим коптера для съемки — это всё таки режим висения
Это хоть и не FPV, но все равно — категорически не согласен
Например: disk.yandex.ru/i/dDM28fdj_f9m4wSergiv Автор
04.07.2022 10:17Движение с малой скоростью - почти тоже самое, что и режим висения.

kAIST
04.07.2022 10:49+1Движение с малой скоростью относительно чего? Не забывайте, что в реальной жизни присутствует обычно ветер. И даже если коптер "висит" на одном месте, по факту он двигается относительно воздушной массы.
vconst
04.07.2022 11:30Ветерок с Ладоги дул — будь здоров ))
Да и радиус облета маяка не маленький, скорость там приличная.
Sergiv Автор
04.07.2022 17:49Согласен. Но при движении коптеров, вертолётов тяга увеличивается ;)
При движении пролетать способен дольше, нежели при висении.
RusikR2D2
04.07.2022 10:20На счёт тупее реагировать - не согласен. Если тупее реагировал бы, то была бы проблема с управлением при висении на месте. Этого не наблюдается.
Не на месте, конечно же. а на скорости.
Основной режим коптера для съемки - это всё таки режим висения. На него и рассчитываю.
Смотря что и как снимать - ролики снятые в движение гораздо интереснее. Представьте, что почти весь экшн-фильм камера стоит на месте... Но если вам нужно именно висение - тогда да. Просто тут важно остальных "предупредить"
Если я так сделаю, то лопасти будут цепляться друг за друга. А так да, чем больше диаметр, тем выше эффективность (но и тут границы существуют).
При наличии принтера, лучи также можно напечатать более длинные. Либо вообще сделать новый корпус для коптера. (как возможность, конечно же)
vconst
04.07.2022 11:31При наличии принтера, лучи также можно напечатать более длинные
У DJI лучи металлические у многих дронов.
Sergiv Автор
04.07.2022 17:54При наличии принтера, лучи также можно напечатать более длинные. Либо вообще сделать новый корпус для коптера. (как возможность, конечно же)Это прям глобальная переделка будет. Придётся моторы менять, а за ними и котроллеры моторов, коэффициенты управления изменяться и получится, в итоге, другой коптер))

hw_store
05.07.2022 12:36Вот никогда б не подумал, что для отладки серьёзной техники "спец"назначения используются игрушечные мультикоптеры

kAIST
04.07.2022 10:46Выше правильно заметили про висение. Даже в инструкции время полета дано не для режима висения, а для движения. Взгляните на раму - даже движки с лопастями не смотрят вертикально вверх, а расположены под небольшим углом. Потому что основное предназначение не висеть, а летать.
Sergiv Автор
04.07.2022 10:52Если для движения, то не указано в каком направлении и с какой скоростью ;)
Выкосы двигателей совсем для других задач реализованы и это не для горизонтального полёта.
kAIST
04.07.2022 11:31Скорость там указана, не помню какая, но указана. А направление не важно, коптер то симметричный.
А зачем выкосы, если не для горизонтального полета?
Sergiv Автор
04.07.2022 17:58Движение есть не только влево и вправо, но и вверх и вниз. Немного разные движения с энергетической точки зрения.
А выкосы нужны для того, чтобы улучить управление по курсу. Если выкосов нет, то коптер по курсу рулит изменяя момент одной диагонали, а этого, зачастую не хватает для чёткого удержания и управления по курсу. Для этого моторы одной диагонали поворачивают в одну сторону и в тот момент, когда эта диагональ нагружается, к моменту от винтов добавляется момент от выкоса моторов, а он уже значителен.
vconst
04.07.2022 11:33Если для движения, то не указано в каком направлении и с какой скоростью ;)
Кстати — указано. В мануале по Мавику примерное время именно в движении, не в «спорт-режиме». Висит дрон почти в 2-3 раза дольше, чем указано в мануале

Geckelberryfinn
04.07.2022 12:09+1Очень любопытно, что в 3D варианте столько времени занимает оптимизация профиля. Я писал в свое время оптимизацию 2D профиля (т.е. для бесконечного крыла), аппроксимировал профиль полиномами и искал наилучший профиль для соотношения подъемной силы и сопротивления. Использовал то ли метод циклического покоординатного спуска, то ли Хука-Дживса. Занимало секунд 10 на домашнем ноуте. В 3D вот не пробовал.

spinagon
04.07.2022 13:06А потому что тут использовался метод брутфорса, а не какой-нибудь градиентной оптимизации
Sergiv Автор
04.07.2022 17:58Как в данном случае применить градиентную оптимизацию?
Geckelberryfinn
05.07.2022 13:52Если профиль аппроксимирован полиномами, то подъемная сила - это многомерная функция от коэффициентов этого полинома. Т.е. решением задачи оптимизации будет поиск таких коэффициентов, при которых отношение подъемной силы к сопротивлению будет максимальным.
Sergiv Автор
05.07.2022 15:06В данном случае проще использовать готовый профиль. Тем более здесь решается не двумерная задача, а трехмерная.


scruff
04.07.2022 14:28Когда приобрел своего подержанного Спарка, я сразу был удивлён его острым лопастям. Ведь острые кончики - это прекрасное место для турбулентности. Однако летает эта шутка весьма не дурно для своего времени и тем более веса. По поводу переделки лопастей - всё это чисто попробовать, не более. Все эти переделки, облегчения, замена моторов и увеличение ёмкости аккумов особо ничего не дадут - ну будет время налёта не 13 минут а 17, что в принципе ни о чем в 2022. Да и радиус действия у Спарка уже никакой, ущербная камера... Всё чаще присматриваюсь к мини2 (ну или хотя бы 1), вот это действительно тачка! Его масса в 249г позволяет "класть с прибором" на ограничения во многих странах, а значит можно летать там где спарку запрещено. Радиус до 4 КМ, автономность в два раза дольше, но хрупкость конструкции и конечно же дороговизна оставляют мою Искорку пока со мной))). Скажите, а вы тестили печатные лопасти на разрыв? Визуально они сильно тоньше заводских.
Sergiv Автор
04.07.2022 18:04Острые кромки - вы про переднюю кромку или про заднюю, и почему место турбулентности ?
По поводу переделки лопастей в данном случае - да, попробовать , проверить теорию на деле, получить с пустого места +7%. Потом полученные знания можно использовать в других проектах, где прибавка будет существенна и выдвинет вперёд ваше изделие относительно от конкурентов. Высосать максимум полезности из того, что имеем - основная задача)) . Меня удивило, что DJI этим сами не озадачились и не сделали более эффективные лопасти к своему изделию.
Скажите, а вы тестили печатные лопасти на разрыв?Руками попробовал порвать - не порвал, а учитывая небольшую центростремительную силу, то сразу поставил на коптер.
Визуально они сильно тоньше заводских.Тоньше, но не сильно.
scruff
05.07.2022 20:21я про заострения на концах, там где линейная скорость максимальная, а значит вероятность возникновения турбулентности выше. Посмотрите конструкцию несущих винтов у настоящих современных вертолетов - концы, особенно где поток набегает, скруглены. по ссылке это особенно видно, даже задний край неслабо скруглили в противоположную сторону. Поэтому, возможно, конструкция ваших винтов с точки зрения турбулентности, лучше, хотя может в чём-то другом и хуже. Неплохо бы "продуть" оба винта (заводской и печатный) в дымной камере в разных режимах - уверен много интересного увидите. Такую визуализацию ни одна программа не заменит))
Sergiv Автор
05.07.2022 20:43Теперь понял вас. Думаю, это ещё связано с тем, что скорость на конце лопасти приближается к скорости звука и, чтобы нивелировать пагубное влияние от это явления сделаны такие законцовки. Но, это только предположение.

MiDeT
04.07.2022 18:06Как вариант версия SE. Он в половину дешевле мини 2, а по сути, если не придираться и не хотеть 4к, а согласиться на 2.5. В общем в самый раз соо ношение цена/все остальное.
MiDeT
04.07.2022 18:28К слову, измерения по времени полета стоило бы повторить.
Дело в чем: если перед этим коптер 'лежал' приличное количество времени, то можно получить на аккумуляторах эффект 'раскачки' (когда повышается эффективность после нескольких зарядов/разрядов).
Может и нет никаких 7% или наоборот, их там 10%
Sergiv Автор
04.07.2022 18:30+1Я знаю про этот эффект. Перед испытаниями я два дня гонял коптер, после этого уже испытывал с равными интервалами (через сутки).

VirtualHunter
05.07.2022 00:23+1Контроллер внутри дрона постоянно отслеживает его положение и корректирует скорость моторов, чтобы удерживать в равновесии. Если очень упрощенно, то в зависимости от угла наклона, увеличивает количество оборотов с соответствующей стороны. Откуда он знает, на сколько увеличивать? Хороший вопрос. Это зависит от коэффициентов в ПИД-регуляторе, которые подобраны так, чтобы давать наилучший результат с соответствующими винтами, моторами, на соответствующем расстоянии и т.д. Таким образом, пропеллер дающий тягу лучше на 7% будет "перерабатывать" со старыми коэффициентами и в следующей итерации расчетов обороты надо будет уже уменьшить. Т.о. контроллер будет дольше приходить к требуемым параметрам в идеале, а в реале просто будет меньше успевать за изменениями, возможны вибрации, осцилляции, уменьшение времени полета, увеличение температуры моторов в разных режимах использования. Изменение параметров винтомоторной группы требует соответствующего изменения настроек.
Показательную ситуацию наблюдал в более драматичном случае, когда двухлопастные винты для phantom 3 были заменены на 3-х лопастные, с соответствующим увеличением тяги при прочих равных. Разумеется без соответствующих изменений настроек. В некоторых режимах дрон переходил к нарастающим осцилляциям, грозящим переворотом.
Но работа над формой лопастей - это очень интересная и важная задача! Приходите в FPV, у нас можно настраивать ПИДы :))
#FPV #PID #Betaflight

Materializator
05.07.2022 00:36Извините, что я с самолëтными вопросами к вертолëтчикам. Но примерно такую же прибавку аэродинамического качества, по непроверенным слухам, даёт установка винглетов на крыло.
Нельзя ли напечатать и попробовать комплект винтов с винглетами? Без расчëта, какие попало, просто для быстрого сравнения?
Sergiv Автор
05.07.2022 05:28На сколько помню, даёт прибавку 2-3% . И крыло обдувается с одинаковой скоростью, а у винта особенность что чем дальше от центра, тем больше скорость обдувается области винта. И любая торчащая штучка, тем более вертикальная на конце лопасти или изменение угла на конце будет оказывать большее влияние на сопротивление, нежели она находилась бы в центре. В общем, только потерь больше будет чем каких-то плюсов. Но мне интересно, на сколько хуже будет, думаю, расчет проведу, в статью добавлю.
VirtualHunter
05.07.2022 00:49А еще можно обратить внимание, что у пропеллеров на mavic 2 уже есть хитрые скошенные концы, призванные вроде как снизить шум. Давно было интересно, а начнет ли кто-то на пропеллерах дронов использовать законцовки (как шарклеты, винглеты на крыльях боингов, аирбасов ит.д.) для увеличения кпд и длительности полета. Уже видел большой ветряк с подобием шарклетов на концах лопастей.
Если и правда на фотополимерном принтере можно сделать легкие пропеллеры, которые выдерживают соответствующую нагрузку, тут конечно открывается целое поле для экспериментов. (с учетом настроек)Sergiv Автор
05.07.2022 05:31Чуть выше в комментарии ответил по поводу законцовок)
На принтере пока можно только прототип напечатать для быстрого тест драйва. Летать в долгую на таких винтах не стал бы.

foxweb
05.07.2022 01:09+1Отличная наукоёмкая работа! Я как раз на Mavic Pro кучу лопастей перепробовал. Большую часть времени я использовал улучшенные Platinum 8331. Они шумят заметно меньше и как-то поживее вращаются. Подделки пробовал, вибрации большие. Оригинал топ по качеству. Как перестали продаваться, закупился американскими Master AirScrew. Каких-то улучшений не заметил, но летает стабильно.
vconst
05.07.2022 11:13закупился американскими Master AirScrew
С этого места поподробнее, сейчас их как-то можно купить? А то Амазон — сами понимаете…
WicRus
А обороты поддержания полёта как изменились? Статья интересная. Дальнейшие изыскания планируете?
Sergiv Автор
Вот обороты, как раз , не измерил. Измерю обязательно, самому интересно стало. Моторы, кстати, греются меньше с самодельными винтами. Дальнейшие изыскания - хочу лопасти жёсткими сделать и провести тесты уже и в полётах на улице.
Goron_Dekar
Ещё хочу сравнения веса родных винтов и новых.
Sergiv Автор
В статью добавил сравнении массы винтов. И обороты, при которых коптер висит.
Didimus
С "мягкими" винтами можно при ветре какие-нибудь процессы типа флаттера или резонанса поймать
Sergiv Автор
Эти процессы не только при ветре имеют место быть, а уже буквально здесь, на "столе", в комнатных условиях.