

Наличие способности находить короткий путь, самый прямой из точки «А» в точку «Б» не выглядит сегодня впечатляющим тестом разумности. Тем не менее, согласно новому отчету, который был опубликован в журнале Nature некоторое время назад, в котором исследователи рассказали о своей навигационной системе искусственного интеллекта, способность исследовать сложные симулированные пространства и находить кратчайший маршрут к цели, ставит системы такого рода на один уровень с человеком и другими животными.
Неожиданным ключом к нужной производительности оказалось то, что при обучении сеть спонтанно выращивала эквивалент «нейронов решетки» (grid cells) — некоторое множество клеток мозга, которое позволяет ряду млекопитающих отслеживать их положение в пространстве.
Для нейробиологов данная работа возможно подскажет важное связующее звено в понимании того, как нейроны решетки в живом мозге позволяют развивать навигационные способности. Работа также показывает, как нейронные сети могут оказать большое влияние на будущие исследования. Нил Берджесс, из Университетского колледжа Лондона, не принимавший участие в исследовании, предположил, что подобные системы должны «обеспечить плодотворную почву для понимания того, как и почему мозг работает именно таким образом».
Между тем, для исследователей в области искусственного интеллекта очевидна польза данной работы для улучшения автоматизированных навигационных систем. Но еще больший вклад это может внести в общие принципы понимания интеллекта и разработки интеллектуальных систем.
По мнению исследователей Андреа Банино из компании DeepMind и Касвелла Барри из Университетского колледжа Лондона, которые были основными авторами статьи в Nature, проект развился из вопроса о функции нейронов решетки, который они изучали. Нейроны решетки часто называют «GPS'ом мозга» из-за их важной роли в навигации многих животных. Эдвард Мозер и Мей-Бритт Мозер получили Нобелевскую премию в 2014 году, за их открытие девятью годами ранее. Эти кластеры нейронов, организованные в гексагональные массивы, в сумме дают результат подобный инерциальным системам навигации кораблей, самолетов и ракет — они дают понимание движений тела в пространстве даже в полной темноте. «Условно говоря, они обновляют ваш прогноз того где вы находитесь, основываясь на том как вы двигаетесь», добавил Барри.
Нейробиологи по этой причине приписывают нейронам решетки функцию «интеграции пути» — подсознательную интуитивную форму навигации, которая не учитывает внешние сигналы: к примеру, «сделать пять шагов вперед, повернуть на 90 градусов налево, и опять идти вперед еще 15 шагов». Но некоторые эксперименты давали подсказки, что эти нейроны выполняют и другие функции, даже выходящие за рамки навигации. К примеру, некоторые опыты показали участие этого типа нейронов в таких задачах как измерение времени и расстояния во время движения. Как отмечает Барри, если нейроны решетки обеспечивают пространственную привязку объектов и мест, то «в принципе вы можете использовать их для вычисления прямых маршрутов между этими точками», — то есть то что по сути называется «векторной навигацией».
Для изучения роли этих нейронов в задачах навигации, исследователи решили использовать нейронные сети с глубоким обучением. Чтобы понять как работает поиск пути, для начала они создали нейронную сеть для агента, который перемещается в небольшом симулированном пространстве. «Мы хотели понять, можем ли мы создать нейронную сеть таким образом, чтобы она сама начала развивать подобие нейронов решетки», сказал Барри.
Нейронная сеть справилась с задачей, и по словам Барри, «удивительно то, насколько хорошо она работала». В процессе работы спонтанно возникли «модули решетки» (grid units), которые поразительно были похожи на то что мы видим в мозге животных, вплоть до формата шестиугольной сетки.

Эти изображения показывают срабатывания живых и искусственных нейронов. Спонтанно возникшие в нейронной сети для навигационных задач модули решетки поразительно похожи на нейроны решетки в мозге, вплоть до их шестиугольной формы расположения.
Затем исследователи добавили системе способности нейронной сети, которые помогали симулированным агентам находить нужный путь к цели в виртуальном лабиринте. Система с модулями решетки на порядок превосходила аналогичную систему без них. К примеру, система могла понять, если закрытый до этого проход давал более короткий путь к цели и выбирать именно его. По словам Банино, это умение продемонстрировало, что модули решетки в нейронной сети обеспечивали векторную навигацию, поскольку обнаруживали более короткие и более прямые пути, основываясь на положении цели.
«Я думаю, что благодаря этой работе мы смогли доказать, как нейроны решетки используются для создания поиска кратчайшего пути», сказал Банино. Таким образом, результаты подтверждают теорию, что нейроны решетки в мозге способны выполнять как задачу интеграции пути, так и задачу векторной навигации. Сопоставимые экспериментальные доказательства в случае живых существ будет получить на порядок сложнее, добавил он.
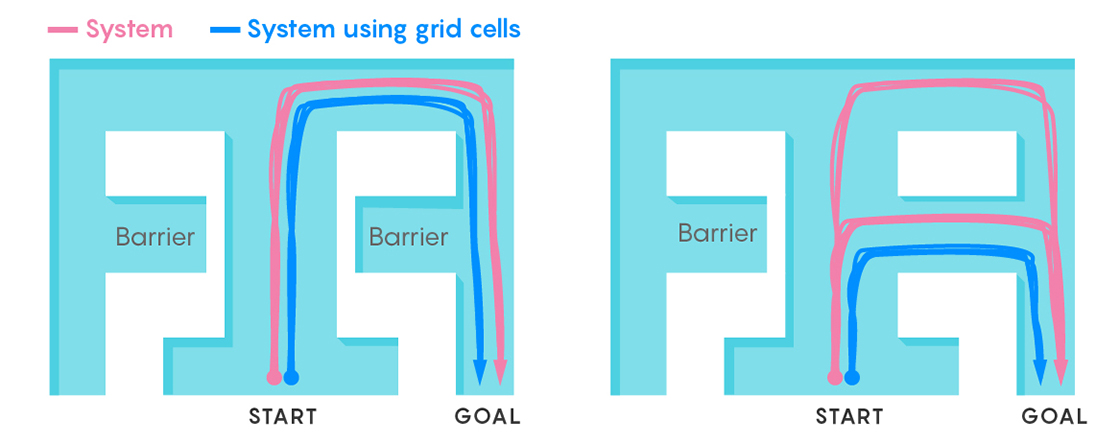
В серии экспериментов по прохождению лабиринта, все тестируемые нейронные сети были в состоянии прийти к цели. Но если убирался один из барьеров, то только сеть с нейронами решетки распознавала это и выбирала такой путь как самый предпочтительный. Остальные системы продолжали выбирать любой из доступных маршрутов.
«Интересным выводом является то, что аналогичный подход может быть использован и для других задач нейронаук», отметил Барри. К примеру, исследователи размышляют над задачей управления конечностями. Нейронные сети можно было бы обучить управлению роботизированной рукой подобно тому как мозг управляет живой рукой, а потом провести серию экспериментов, которые могут дать важные подсказки о том, как эти процессы протекают в живых системах. «Этот подход потенциально может стать универсальным инструментом в области нейронаук».
«Это довольно впечатляющий результат», резюмировал Стефан Лойтгеб, профессор нейробиологии Калифорнийского университета в Сан-Диего. «Я думаю они нашли очень хороший аргумент в пользу того, что векторная навигация является функцией нейронов решетки. Длительное время это было лишь предположением, но я думаю они подобрались максимально близко к разгадке возможного механизма».
В то же время он заметил, что: «Любой вычислительный подход имеет свои ограничения. И то что это может работать на модели, не означает, что именно таким способом это работает у живых организмов».
Франческо Савелли, нейробиологи из Университета Джона Хопкинса, который был со-автором комментариев, сопровождавших статью, имеет схожий взгляд. Он считает очень интересным, что «вы каким-то образом получаете нейроны решетки, не программируя их напрямую, но они все равно появляются в качестве самоорганизации». Но в то же время «поскольку это не точная биологическая система, вы не можете быть до конца уверены, какой именно вывод это дает».
«Пока вы не можете заглянуть в этот черный ящик, и сделать сеть чуть более похожей на биологическую, в какой-то момент вы упретесь в предел относительно нейробиологических исследований», сказал он.
С другой стороны, с технической точки зрения обнадеживает то что «эти системы глубокого обучения могут решать задачи, которые все больше и больше похожи на высшие когнитивные функции мозга», добавил Савелли. «Это хорошая демонстрация того, что глубокое обучение может распространяться в том числе на задачи подобные высшим когнитивным функциям».
Можно предположить, что исследователи из DeepMind будут стремиться использовать данную навигационную сеть для улучшения, скажем, способностей исследовательских роботов или будущих дронов-беспилотников. Но по словам Банино, их планы менее сфокусированные и более амбициозные. «Мы считаем, что навигация — это одно из фундаментальных свойств интеллекта», сказал он. «Лично мы не думает о каком-либо применении, кроме как создание универсального алгоритма».
«Мозг — это единственный пример универсального алгоритма», добавил он. «Так почему бы не поучиться у него».
VDG
Полная статья из Nature доступна по подписке, но авторы расшарили её pdf: deepmind.com/blog/grid-cells (ссылка внутри статьи).