
Принцип работы лидарных датчиков заключается в отражении света лазеров от окружающих объектов и создании трехмерного облака точек. Первый современный трехмерный лидар был создан для конкурса DARPA Grand Challenge 2005 года, основного конкурса среди беспилотных автомобилей. В наши дни многие эксперты продолжают рассматривать лидары в качестве ключевой технологии для беспилотных машин.
Оригинальный лидар 2005 года, созданный компанией Velodyne, имел вертикальный массив из 64 лазеров, которые вращались на 360 градусов, и каждый лазер в массиве должен быть тщательно выровнен с соответствующим детектором. Эта сложность привела к тому, что цена достигла $75 000. В наши дни высококлассные лидары по-прежнему стоят десятки тысяч долларов.
Сейчас десятки стартапов пытаются создать более дешевые лидары. Многие из них пытаются снизить цену, используя один лазерный луч, который сканируется в двухкоординатной модели.
Однако другие компании, работающие с лидарами, двигаются в другом направлении: они строят лидары с тысячами лазеров. Компания Sense продает лидары с 11 000 лазеров по цене $3000. Другая компания под названием Ibeo работает над лидаром, в котором будет более 10 000 лазеров.
Для ясности отметим, что новый лидар от Ibeo еще не выпущен, а потому мы не знаем насколько хорошо он будет работать, а показатели лидаров от Sense далеки от производительности лучших лидаров от Velodyne. Дальность лидаров от Sense – от 15 до 40 метров, в то время как некоторые модели Velodyne работают на расстоянии 200 метров.
Тем не менее, генеральный директор Sense Скотт Берроуз говорит, что их компания только начинает свою работу. Sense работает над новым датчиком c дальностью работы в 200 метров, который должен выйти в следующем году. Планируется, что эта модель сможет соревноваться с лидерами рынка. В свою очередь, Ibeo имеет глубокие связи с автомобильной промышленностью, что позволяет компании заключать крупные сделки с автопроизводителями-партнерами.
Микротрансферная печать
И Sense, и Ibeo используют недорогой тип лазеров – лазеры с вертикальным излучением (VCSEL). Эти лазеры могут производиться с использованием привычных полупроводниковых технологий, что позволяет разместить тысячи или даже миллионы устройств на одной пластине. Ранее мы рассказывали о другом стартапе под названием Ouster, их лидар основан на VCSEL.
В лидаре от Sense намного больше лазеров, чем в лидаре от Ouster. Чтобы добиться этого, Sense используют технологию, которая называется микротрансферная печать.
Разместить несколько тысяч VCSEL на одном чипе нетрудно. Но при изготовлении чипа, на котором плотно расположены 11 000 лазеров, у вас могут возникнуть проблемы. Лазеры в таком количестве на малой площади могут выделять большой объем тепла. Также у вас могут возникнуть проблемы с безопасностью для глаз. Лазеры с вертикальным излучением работают на частоте, которая может повредить сетчатку, а 11 000 лазеров, направленных на человеческий глаз, могут привести к необратимым травмам.
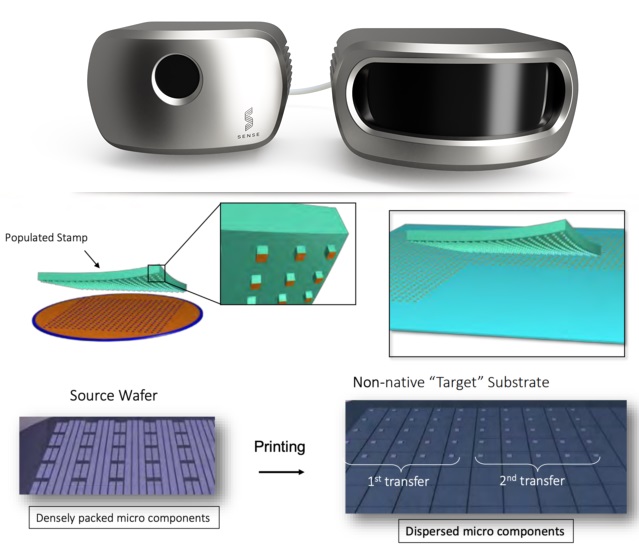
У Sense есть разумное решение этой проблемы: распределение лазеров. После установки тысяч лазеров с вертикальным излучением на пластину из арсенида галлия, Sense переносит их на новую теплопроводящую керамическую подложку, разрежая плотность установки лазеров.
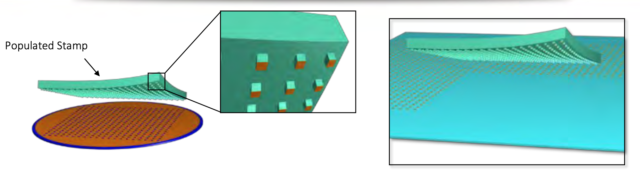
В этот момент в дело вступает микротрансферная печать. В этой технологии используется резиновый штамп, на дне которого расположена сетка с резиновыми выступами. Когда один из выступов касается лазера с вертикальными излучением, он может приподнять его с помощью силы статического электричества.

Выступы расположены так, что один из каждых n чипов (отсчитывая и по горизонтали, и по вертикали) приподнимается с исходной пластины и помещается на новую подложку. Далее, штамп собирает набор чипов из идущих далее слотов для следующего лидара. Таким образом, одна кремниевая пластина может образовывать сборки на 11 000 лазеров для множества лидаров.
Sense стремится увеличить радиус действия своих лидаров
Вместо того чтобы сканировать сцену последовательно (так, как это делают большинство лидаров), лидары от Sense используют свои 11 000 лазеров чтобы осветить всю сцену за одну вспышку, после чего датчик измеряет время, за которое обратная вспышка отражается со всех направлений.
Вспышечные лидары вроде этого, как правило, имеют малую дальность действия, поскольку освещение всей сцены приводит к тому, что свет теряется в промежутках между пикселями. По сути, Sense решают эту проблему методом грубой силы, используя большое количество света для освещения сцены. Распределение лазеров помогает справляться с выделяемым теплом и вредом для человеческих глаз – проблемами, которые могли бы возникать при подобном подходе.
Тем не менее, генеральный директор Ouster Ангус Паскала отмечает, что подход Sense имеет существенный недостаток: высокое энергопотребление. “Чем больше электроэнергии, тем больше датчики” – комментарий Ангуса для Ars. “Чем больше датчики, тем выше цена и больше сложность интеграции”.
Несмотря на то, что нынешние продукты Sense потребляют больше электроэнергии, чем лидары от ведущих компаний, они имеют меньшую дальность действия. Также лидары от Ouster и Velodyne вращаются на 360 градусов, в то время как вам понадобится несколько лидаров от Sense для того, чтобы получить аналогичное покрытие.
Берроуз планирует выпустить лидар с дальностью действия в 200 метров в 2021 году. У этого лидара будет более 11 000 лазеров, хотя точное количество еще неизвестно. Основной задачей будет достижение большей дальности действия без столь же значительного увеличения энергопотребления.
Однофотонные лавинные диоды входят в моду

Один из вариантов решения этой задачи – использование массива однофотонных лавинных диодов (SPAD) для определения отраженных лазерных лучей в лидарных датчиках нового поколения. Это еще одно сходство с лидарами от Ouster, в которых используются SPAD. В интервью Ars Technica в 2018 году Пакала сказал, что его долгосрочная стратегия заключается в использовании двумерных массивов лазеров с вертикальным излучением и датчиков на однофотонных лавинных диодах, что позволит создать лидары, которые работают как камеры – продукт, который Sense планирует представить в следующем году.
Как следует из названия, датчики на однофотонных лавинных диодах достаточно чувствительны, чтобы засечь один фотон. Как и лазеры с вертикальным излучением, они могут быть изготовлены с использованием привычных технологий работы с кремнием, что позволяет им быть дешевыми в терминах масштабирования. Большая чувствительность этих датчиков может помочь Sense достичь большей дальности действия для имеющегося количества лазерного света.
Интересно, что Ibeo также планируют использовать однофотонные лавинные диоды в своих лидарах следующего поколения.
Ibeo – это не стартап. Некоторые из их лидаров участвовали в DARPA Grand Challenge 2005 года, хотя участие компании упущено из виду, потому что их лидары имели всего 4 линии сканирования, в то время как у лидаров Velodyne было 64. Ibeo совершили крупный переворот несколько лет назад, когда они получили контракт на поставку лидаров для Audi – первый случай, когда лидары были установлены в серийных автомобилях. Также миноритарным акционером Ibeo является ZF Friedrichshafen, что помогает им заключать еще больше контрактов на поставки датчиков для автомобилей.
В своем интервью, данном в четверг, операционный директор Ibeo Марио Брамм рассказал Ars, что лидар следующего поколения от Ibeo должен выйти в конце этого года и будет иметь массивы лазеров вертикального излучения и однофотонных лавинных диодов размерности 128 на 80. Ibeo стремятся к модульному дизайну, который позволит компании использовать различную оптику для создания диапазона моделей с разными возможностями – от лидаров дальнего действия с малым углом обзора, до широкоугольных лидаров с более коротким радиусом действия. Ibeo хотят сделать эти лидары достаточно дешевыми, чтобы их можно было продавать автомобильным концернам для массового производства, начиная с конца 2022 или начала 2023 года.
Очевидный вопрос заключается в том, как Ibeo будут решать проблемы с температурой и безопасностью для глаз, которые Sense решает с помощью микротрансферной печати. Одно из решений – использование высокочувствительных однофотонных лавинных диодов, благодаря чему Ibeo смогут уменьшить выходную мощность своих лазеров достаточно для того, чтобы избежать проблем с питанием и опасностью для человеческих глаз. Другим вариантом решения является использование непосредственного соединения между каждым лазером и датчиком, что приведет к уменьшению количества “потерянных” фотонов. Во время нашего разговора Брамм сказал, что низкая мощность является приоритетом для клиентов, представляющих автомобильный рынок.
С другой стороны, может оказаться, что этот подход трудно реализовать без технологии микротрансферной печати, которой пользуются Sense, в то время как Ibeo и Ouster будут пытаться создать твердотельные лидары без нее.
Поправка: сначала я заявил, что лазеры с вертикальным излучением, которыми пользуются Sense сделаны из кремния – на самом деле они основаны на арсениде галлия.

О компании ИТЭЛМА
Мы большая компания-разработчик automotive компонентов. В компании трудится около 2500 сотрудников, в том числе 650 инженеров.
Мы, пожалуй, самый сильный в России центр компетенций по разработке автомобильной электроники. Сейчас активно растем и открыли много вакансий (порядка 30, в том числе в регионах), таких как инженер-программист, инженер-конструктор, ведущий инженер-разработчик (DSP-программист) и др.
У нас много интересных задач от автопроизводителей и концернов, двигающих индустрию. Если хотите расти, как специалист, и учиться у лучших, будем рады видеть вас в нашей команде. Также мы готовы делиться экспертизой, самым важным что происходит в automotive. Задавайте нам любые вопросы, ответим, пообсуждаем.
Мы, пожалуй, самый сильный в России центр компетенций по разработке автомобильной электроники. Сейчас активно растем и открыли много вакансий (порядка 30, в том числе в регионах), таких как инженер-программист, инженер-конструктор, ведущий инженер-разработчик (DSP-программист) и др.
У нас много интересных задач от автопроизводителей и концернов, двигающих индустрию. Если хотите расти, как специалист, и учиться у лучших, будем рады видеть вас в нашей команде. Также мы готовы делиться экспертизой, самым важным что происходит в automotive. Задавайте нам любые вопросы, ответим, пообсуждаем.
Читать еще полезные статьи:






nckma
Мне вот интересно, а как автомобили будут отличать свой сигнал, отраженный от объектов, от сигналов лидаров других авто едущих навстречу? Единственный способ, который приходит на ум — сигналы должны быть модулированы какой-то псевдослучайной последовательностью, чтобы по корелляции различать свои сигналы от чужих. Но как это будет сделано на самом деле?
DryominG
Алгоритмы и модуляция, как Вы и указали. Здесь говорится о массиве излучающих лазеров, это не лидар с одним мощным источником-лазером, где имеет место когерентность сигнала.
Rsa97
Ну будет в лидар поступать разом несколько отражённых сигналов, каждый со своей модуляцией. Датчик то получит только их сумму. Если для вычленения «своего» сигнала из этой мешанины придётся давать несколько сотен/тысяч импульсов, то быстродействие снизится в соответствующее количество раз.
И ещё ситуация — луч послали, а на его пути зеркало. Луч ушёл вбок и не вернулся. Какое расстояние до зеркала?
Bedal
В остальном — так же, как поступает мозг со слепым пятном: выдумывает, что бы это там могло быть.
Bedal
sergehog
В мире есть миллионы фотографов, и тысячи из них прямо в этот момент фотографируют что-нибудь. Почему они не засвечивают друг-другу фотографии, если пользуются вспышками? Да потому что они все фотографируют в разных местах и в разных направлениях и в разные моменты времени.
То же самое и с лидарами. Они не работают на каких-то когерентных частотах как радары, а просто посылают короткие (очень короткие) импульсы туда-сюда, и принимают отражение. В инфакрасном диапазоне линзы тоже работают, поэтому фотодетектору не надо обозревать 360 градусов вокруг себя, просто смотреть примерно туда-же куда отправили, что и делается с помощью линзы. В следующий момент времени приемо-передатчик уже слегка повернется и снова отправит импульс, который улетит уже в другую сторону.
Чтобы задетектировать чужой импульс, нужно чтобы в той самой стороне куда только что отправили сигнал стоял еще один такой-же лидар и чтобы он был очень точно отсинхранизирован по времени и выстрелил обратно в тот же самый момент. Это крайне маловероятно, а если и произойдет то получится что одна точка в полученном поинт-клауде будет испрочена. Следующее измерение уже пойдет в сторону и не затронет тот второй лидар никак. Даже если у вас миллион лидаров в одной комнате, они будут продолжать работать нормально, максимум что может случиться — повысится уровень шумов в принимаемых клаудах.
vassabi
не скажу насчет «миллиона в одной комнате», но вот встанут такие машинки в пробке — там засветка прилетит не только по отраженной точке, а еще и напрямую в камеру лидара.
eugea79
совсем не правильно. приемник ловит отражение и считает расстояние по времени. если приемник уловил чужой сигнал то выбудете знать что там что то есть но не знать на каком расстоянии. уже при трех лидарах работающих рядом начинаются проблемы.