
Компания SpaceX, основанная небезызвестным Илоном Маском, выпустила симулятор ручной стыковки корабля Crew Dragon с МКС. Если все пойдет по плану, стыковку проведут 27 мая 2020 года. Она будет проходить в полностью автоматическом режиме, но экипаж корабля сможет переключиться на ручное управление. Собственно, именно ручной режим и воспроизведен в симуляторе.
Сам симулятор расположен на сайте и представляет собой, довольно проблематичную, на первый взгряд игрушку…
Космический челнок так и норовит улететь не туда… А точность с которой нужно попасть в шлюз составляет 20 см… по трем осям, а также по угловой скорости, скорости смещения и т.д.
Во мне заиграли патриотичные чувства и как-то стало обидно, за бывшую космическую державу, и я принял этот симулятор как вызов. Раз Маск решил показать сложность стыковки, и какие сложности их инженеры проходили, чтобы сделать программу автоматической стыковки, я решил написать, в свободное от работы время, программу на JavaScript, которая с легкостью состыкует Dragon и МКС в этом симуляторе.
Как тебе такое, Илон Маск?

Курение вредит вашему здоровью
Для начала немного истории.
Широко известный факт, что наш многоразовый космический корабль «Буран» был очень похож на американский челнок. А так же известно, что он летал всего только один раз, в отличии от американских «аналогов». Но мало кто знает, что его единственный полет был беспилотным. Он сам взлетел, сам приземлился и все это он сделал в очень плохие погодные условия.
Американские Шатлы всегда приземлялись только в ручном режиме. Это было удивительно, принимая во внимание тот факт, что компьютеры раньше были не мощнее калькулятора. То, в теории, это не должно быть сложно, — подумал вчера вечером.
Но дайте перейдем к сути. Что представляет собой симулятор на сайте SpaceX.
На старте мы видим общую информацию, что отклонение по всем параметрам должно быть в пределах 0.2 метра (20 см). Учитывая размеры станции и корабля, это довольно серьезное ограничение.
Запускаем симулятор и видим.

Сверху, справа и снизу центральной окружности — угловое отклонение корабля по трем осям.
Зеленым — текущее значение.
Синие — скорость в секунду с которым оно изменяется.
Слева смещение относительно, шлюза в метрах. Скорости смещения нет…
Контролёры управления внизу экрана представляют собой кнопки с дублированием их на клавиатуре.
Вот с них и начнем разбор программы, как наименее интересных.
Схема клавиатурных кнопок.

Левый блок отвечает за смещение относительно шлюза, а вот правый за смещение относительно осей.
Пишем, или находим в сети, код который умеет эмулировать клавиатруные нажатие на document. В моем случае код выглядел так.
Запишем коды кнопок:
Любая система управления подразумевает работу в цикле. Сделаем его наиболее простым, с шагом в 200 миллисекунд. За одно организуем счетчик, он нам еще понадобится.
Вернемся к структуре сайта.
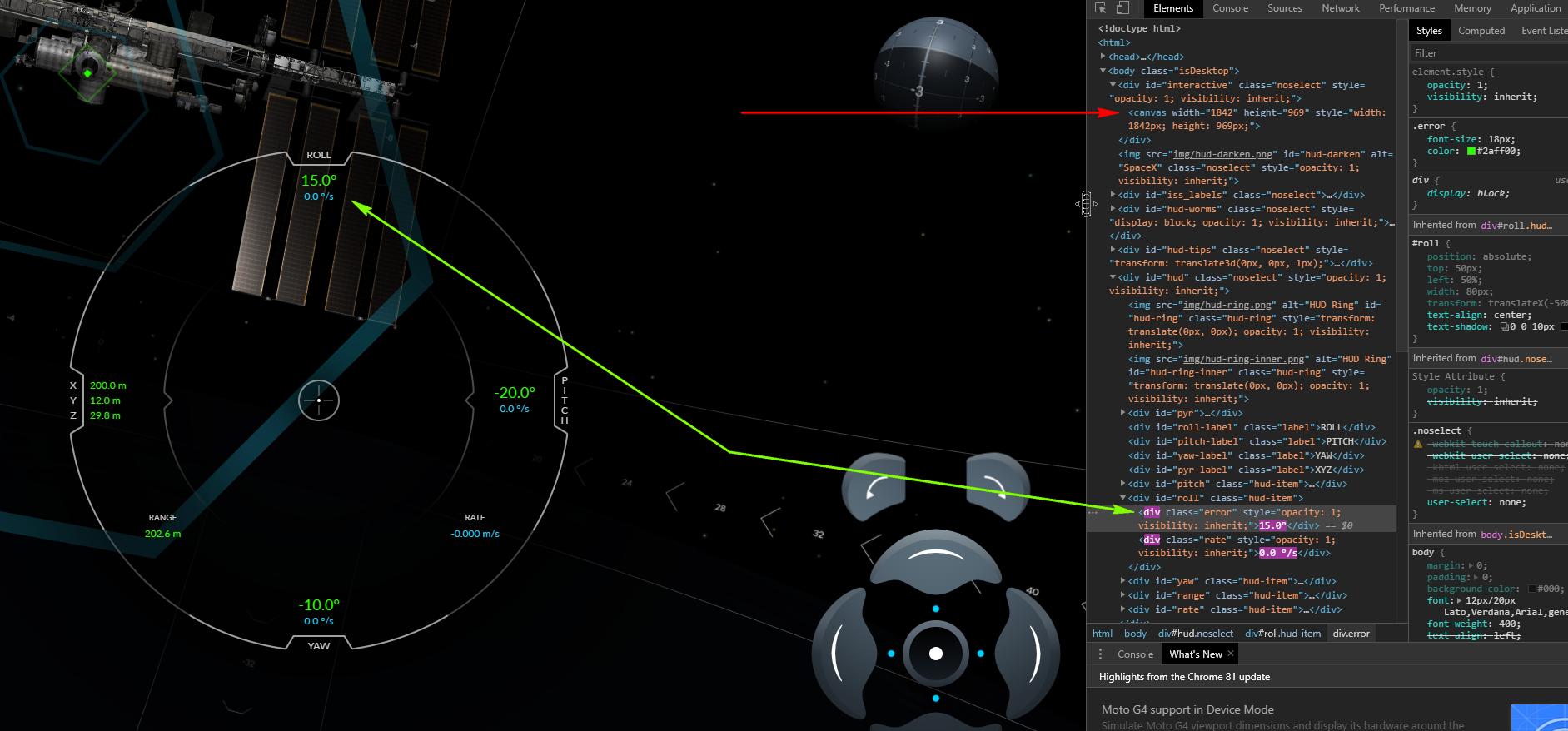
Его интересной особенностью является, что МКС рисуется на канвасе, а вот информация о состоянии нашего космического корабля нарисованы обычной разметкой. Такое чувство, что разработчики сайта предполагали, что найдутся подобные энтузиасты, кто захочет «автоматизировать» игру и дали им такую возможность… А может разметкой, было сделать, тупо, проще.
И так, допишем еще пару легких строк, дабы вытащить информацию о состоянии нашего космического аппарата.
Как можно заметить я вытащил далеко не всё. Я вытащил только значения смещения, но скорость изменения значений брать не стал и вот почему…
На самом деле, это уже третья итерация алгоритма. Сначала он представляя собой простой вариант, который каждый 200 миллисекунд берет информацию о состоянии корабля и подгоняет его под 0.
Выглядело это так.
И на самом деле он вполне был рабочий. Особенно для угловых смещений. А для смещения по осям я использовал такой вариант.
Скорость смещения корабля относительно каждой из осей на экран не выводится, но её не сложно подсчитать.
И получалось довольно сносно. Классическая схема управления с обратной связью. И пока корабль был на удалении от МКС мы летели себе вполне ровненько [так мне тогда казалось]. Но проблемы начинались возле самого корабля. На самом деле корабль сильно колбасило и попасть с точностью 0.2 метра было физически невозможно. Дело в том, что смешение нашего корабля происходило… скажем так в непрерывном пространстве (с большой точностью), а вот мы видели лишь десятые доли от этого. И естественно, пытаясь реагировать на них каждые 200 миллисекунд, у нас получалось очень сильные действия по регулированию. Мы слишком много раз «тыкали на кнопки» при малейшем отклонении. А чем ближе к кораблю, тем сильнее значения смещения начинали скакать и мы фактически еще больше раскачивали корабль… Увеличивая амплитуду его движения…
Нужно было где-то взять недостающую точность. Во второй итерации в решении данной задачи, я сам постарался посчитать уже только на основе смещения скорости. И да, так вроде тоже получалось неплохо, но это не решило проблему с движением…
А в чем суть проблемы движения? Ну смотрите, мы находим в космическом пространстве и нажимая на кнопки управление придаём ускорение кораблю в той или иной плоскости. Но как только мы отпускаем кнопку движение не прекращается. В космическом пространстве, в связи с вакуумом, нет никакого сопротивления. И как только мы придали импульс (нажатием кнопки) корабль начал движение с этой скоростью… И его нужно как-то остановить. Остановить в симуляторе довольно легко – нужно дать обратный импульс.
Но на второй итерации решения, увеличенная точность ошибки не давала мне ответа о том, как мне корректировать скорость…
И вот здесь нам и потребовался «циркуль». Капитан любого корабля/судна должен рассчитывать маршрут заранее. Если он даст команду сбросить скорость после того как войдет в порт, то вряд ли он ювелирно пришвартуется. А нам, как раз, это и нужно.
Нам нужно рассчитать маршрут, капитаны обычно это делают с помощью циркуля с дискретным состоянием его наконечников. И сделаем тоже самое. Будем рассчитывать маршрут на секунду вперед, которая будет включать в себя пять итераций нажатий на кнопки ну или не будет.
Функция carculatePath, исходя их текущего значения отклонении, рассчитывает 5 шагов которые по идее должны это уклонение свести к 0. Необязательно на этой итерации, но каждый раз мы должны приближаться к заветному нулю в свой собственной более детальной сетке.
Собственно всё, мы рассчитываем маршрут каждую «равную» секунду (index % 5 === 0) и теперь нужно просто идти этим курсом.
Единственный расчет, который уцелел еще с первой итерации, это сближение с кораблем.
Тут довольно всё, хорошо, мы, на относительно малом ходу, движемся вперед
Под спойлером полный код. Вы можете сами проверить его работоспособность на сайте iss-sim.spacex.com
Собственно всё. Всем спасибо за прочтение :)

Да, я немного хайпанул и поприкалывался. Не воспринимайте статью всерьез, я просто хотел почувствовать себя космонавтом [или летуном космическим], как Гагарин Юрий Алексеевич… Хотя это скорее инженерная работа Королёва Сергея Павловича, который к сожалению, так и не побывал в космосе, о котором мечтал…
Сам симулятор расположен на сайте и представляет собой, довольно проблематичную, на первый взгряд игрушку…
Космический челнок так и норовит улететь не туда… А точность с которой нужно попасть в шлюз составляет 20 см… по трем осям, а также по угловой скорости, скорости смещения и т.д.
Во мне заиграли патриотичные чувства и как-то стало обидно, за бывшую космическую державу, и я принял этот симулятор как вызов. Раз Маск решил показать сложность стыковки, и какие сложности их инженеры проходили, чтобы сделать программу автоматической стыковки, я решил написать, в свободное от работы время, программу на JavaScript, которая с легкостью состыкует Dragon и МКС в этом симуляторе.
Как тебе такое, Илон Маск?
Курение вредит вашему здоровью
Внимание! Данный алгоритм является «стебным», и не предназначал для использования его в реальных условиях. Автор не несет ответственности за любые прямые или косвенные убытки, нанесенные вашему космическому кораблю или иным объектам при использовании данного алгоритма.
Для начала немного истории.
Широко известный факт, что наш многоразовый космический корабль «Буран» был очень похож на американский челнок. А так же известно, что он летал всего только один раз, в отличии от американских «аналогов». Но мало кто знает, что его единственный полет был беспилотным. Он сам взлетел, сам приземлился и все это он сделал в очень плохие погодные условия.
Американские Шатлы всегда приземлялись только в ручном режиме. Это было удивительно, принимая во внимание тот факт, что компьютеры раньше были не мощнее калькулятора. То, в теории, это не должно быть сложно, — подумал вчера вечером.
Но дайте перейдем к сути. Что представляет собой симулятор на сайте SpaceX.
На старте мы видим общую информацию, что отклонение по всем параметрам должно быть в пределах 0.2 метра (20 см). Учитывая размеры станции и корабля, это довольно серьезное ограничение.
Запускаем симулятор и видим.
Сверху, справа и снизу центральной окружности — угловое отклонение корабля по трем осям.
Зеленым — текущее значение.
Синие — скорость в секунду с которым оно изменяется.
Слева смещение относительно, шлюза в метрах. Скорости смещения нет…
Контролёры управления внизу экрана представляют собой кнопки с дублированием их на клавиатуре.
Вот с них и начнем разбор программы, как наименее интересных.
Схема клавиатурных кнопок.
Левый блок отвечает за смещение относительно шлюза, а вот правый за смещение относительно осей.
Пишем, или находим в сети, код который умеет эмулировать клавиатруные нажатие на document. В моем случае код выглядел так.
function simulateKey(keyCode, type, modifiers) {
var evtName = (typeof (type) === "string") ? "key" + type : "keydown";
var modifier = (typeof (modifiers) === "object") ? modifier : {};
var event = document.createEvent("HTMLEvents");
event.initEvent(evtName, true, false);
event.keyCode = keyCode;
for (var i in modifiers) {
event[i] = modifiers[i];
}
document.dispatchEvent(event);
}
function keyPress(keyCode) {
simulateKey(keyCode)
setTimeout(() => simulateKey(keyCode, "up"), 15);
}
Запишем коды кнопок:
let _accelerator = 69;
let _brake = 81;
let _translateLeft = 65;
let _translateRigth = 68;
let _translateUp = 87;
let _translateDown = 83;
let _left = 37;
let _rigth = 39;
let _up = 38;
let _down = 40;
let _rollRigth = 105;
let _rollLeft = 103;Любая система управления подразумевает работу в цикле. Сделаем его наиболее простым, с шагом в 200 миллисекунд. За одно организуем счетчик, он нам еще понадобится.
let index = 0;
function A() {
index++;
setTimeout(A, 200);
}
A();
Вернемся к структуре сайта.
Его интересной особенностью является, что МКС рисуется на канвасе, а вот информация о состоянии нашего космического корабля нарисованы обычной разметкой. Такое чувство, что разработчики сайта предполагали, что найдутся подобные энтузиасты, кто захочет «автоматизировать» игру и дали им такую возможность… А может разметкой, было сделать, тупо, проще.
И так, допишем еще пару легких строк, дабы вытащить информацию о состоянии нашего космического аппарата.
let range = parseFloat($("#range .rate").outerText.split(' '));
let yDistance = parseFloat($("#y-range .distance").outerText.split(' ')[0]);
let zDistance = parseFloat($("#z-range .distance").outerText.split(' ')[0]);
let rollError = parseFloat($("#roll .error").outerText);
let pitchError = parseFloat($("#pitch .error").outerText);
let yawError = parseFloat($("#yaw .error").outerText);
let rate = parseFloat($("#rate .rate").outerText.split(' ')[0]);Как можно заметить я вытащил далеко не всё. Я вытащил только значения смещения, но скорость изменения значений брать не стал и вот почему…
На самом деле, это уже третья итерация алгоритма. Сначала он представляя собой простой вариант, который каждый 200 миллисекунд берет информацию о состоянии корабля и подгоняет его под 0.
Выглядело это так.
if (rollError !== -rollSpeed) {
const rollLimit = (Math.abs(rollError) / 10);
if (0 < rollError && rollSpeed < rollLimit) {
keyPress(_rollRigth);
} else if (rollError < -0 && -rollLimit < rollSpeed) {
keyPress(_rollLeft);
}
}И на самом деле он вполне был рабочий. Особенно для угловых смещений. А для смещения по осям я использовал такой вариант.
const zLimit = (Math.abs(yawError) / 10);
if (0 < zDistance && zSpeed < zLimit) {
keyPress(_translateDown);
} else if (zDistance < 0 && -1 < zSpeed) {
keyPress(_translateUp);
}Скорость смещения корабля относительно каждой из осей на экран не выводится, но её не сложно подсчитать.
function carculateSpeed() {
let yDistance = parseFloat($("#y-range .distance").outerText.split(' ')[0]);
let zDistance = parseFloat($("#z-range .distance").outerText.split(' ')[0]);
ySpeed = yPrev - yDistance;
yPrev = yDistance;
zSpeed = zPrev - zDistance;
zPrev = zDistance;
setTimeout(carculateSpeed, 1000);
}
carculateSpeed();И получалось довольно сносно. Классическая схема управления с обратной связью. И пока корабль был на удалении от МКС мы летели себе вполне ровненько [так мне тогда казалось]. Но проблемы начинались возле самого корабля. На самом деле корабль сильно колбасило и попасть с точностью 0.2 метра было физически невозможно. Дело в том, что смешение нашего корабля происходило… скажем так в непрерывном пространстве (с большой точностью), а вот мы видели лишь десятые доли от этого. И естественно, пытаясь реагировать на них каждые 200 миллисекунд, у нас получалось очень сильные действия по регулированию. Мы слишком много раз «тыкали на кнопки» при малейшем отклонении. А чем ближе к кораблю, тем сильнее значения смещения начинали скакать и мы фактически еще больше раскачивали корабль… Увеличивая амплитуду его движения…
Нужно было где-то взять недостающую точность. Во второй итерации в решении данной задачи, я сам постарался посчитать уже только на основе смещения скорости. И да, так вроде тоже получалось неплохо, но это не решило проблему с движением…
А в чем суть проблемы движения? Ну смотрите, мы находим в космическом пространстве и нажимая на кнопки управление придаём ускорение кораблю в той или иной плоскости. Но как только мы отпускаем кнопку движение не прекращается. В космическом пространстве, в связи с вакуумом, нет никакого сопротивления. И как только мы придали импульс (нажатием кнопки) корабль начал движение с этой скоростью… И его нужно как-то остановить. Остановить в симуляторе довольно легко – нужно дать обратный импульс.
Но на второй итерации решения, увеличенная точность ошибки не давала мне ответа о том, как мне корректировать скорость…
И вот здесь нам и потребовался «циркуль». Капитан любого корабля/судна должен рассчитывать маршрут заранее. Если он даст команду сбросить скорость после того как войдет в порт, то вряд ли он ювелирно пришвартуется. А нам, как раз, это и нужно.
Нам нужно рассчитать маршрут, капитаны обычно это делают с помощью циркуля с дискретным состоянием его наконечников. И сделаем тоже самое. Будем рассчитывать маршрут на секунду вперед, которая будет включать в себя пять итераций нажатий на кнопки ну или не будет.
if (index % 5 === 0) {
calculatePath(roll, rollError);
calculatePath(pitch, pitchError);
calculatePath(yaw, yawError);
calculatePath(y, yDistance);
calculatePath(z, zDistance);
}Функция carculatePath, исходя их текущего значения отклонении, рассчитывает 5 шагов которые по идее должны это уклонение свести к 0. Необязательно на этой итерации, но каждый раз мы должны приближаться к заветному нулю в свой собственной более детальной сетке.
function calculatePath(data, value) {
data.path = [];
if (data.prev === value) {
data.speed = 0;
}
for (let i = 0; i < 5; i++) {
if (0 < value + data.speed * (i + 1)) {
data.speed -= 0.1;
data.path.push(-1);
} else if (value + data.speed * (i + 1) < -0) {
data.speed += 0.1;
data.path.push(1);
} else if (i > 0) {
if (0 < data.speed) {
data.speed -= 0.1;
data.path.push(-1);
} else if (data.speed < 0) {
data.speed += 0.1;
data.path.push(1);
} else {
data.path.push(0);
}
} else {
data.path.push(0);
}
}
data.prev = value;
}Собственно всё, мы рассчитываем маршрут каждую «равную» секунду (index % 5 === 0) и теперь нужно просто идти этим курсом.
let rollStep = roll.path[index % 5];
if (0 < rollStep) {
keyPress(_rollLeft);
} else if (rollStep < 0) {
keyPress(_rollRigth);
}
let pitchStep = pitch.path[index % 5];
if (0 < pitchStep) {
keyPress(_up);
} else if (pitchStep < 0) {
keyPress(_down);
}
let yawStep = yaw.path[index % 5];
if (0 < yawStep) {
keyPress(_left);
} else if (yawStep < 0) {
keyPress(_rigth);
}
let yStep = y.path[index % 5];
if (0 < yStep) {
keyPress(_translateRigth);
} else if (yStep < 0) {
keyPress(_translateLeft);
}
let zStep = z.path[index % 5];
if (0 < zStep) {
keyPress(_translateUp);
} else if (zStep < 0) {
keyPress(_translateDown);
}Единственный расчет, который уцелел еще с первой итерации, это сближение с кораблем.
Тут довольно всё, хорошо, мы, на относительно малом ходу, движемся вперед
const rangeLimit = Math.min(Math.max((Math.abs(range) / 100), 0.05), 2);
if (-rate < rangeLimit) {
keyPress(_accelerator);
} else if (-rangeLimit < -rate) {
keyPress(_brake);
}
Под спойлером полный код. Вы можете сами проверить его работоспособность на сайте iss-sim.spacex.com
Полный код
function simulateKey(keyCode, type, modifiers) {
var evtName = (typeof (type) === "string") ? "key" + type : "keydown";
var modifier = (typeof (modifiers) === "object") ? modifier : {};
var event = document.createEvent("HTMLEvents");
event.initEvent(evtName, true, false);
event.keyCode = keyCode;
for (var i in modifiers) {
event[i] = modifiers[i];
}
document.dispatchEvent(event);
}
function keyPress(keyCode) {
simulateKey(keyCode)
setTimeout(() => simulateKey(keyCode, "up"), 15);
}
let _accelerator = 69;
let _brake = 81;
let _translateLeft = 65;
let _translateRigth = 68;
let _translateUp = 87;
let _translateDown = 83;
let _left = 37;
let _rigth = 39;
let _up = 38;
let _down = 40;
let _rollRigth = 105;
let _rollLeft = 103;
let index = 0;
roll = {
path: [0, 0, 0, 0, 0],
prev: 0,
speed: 0,
}
pitch = {
path: [0, 0, 0, 0, 0],
prev: 0,
speed: 0,
}
yaw = {
path: [0, 0, 0, 0, 0],
prev: 0,
speed: 0,
}
z = {
path: [0, 0, 0, 0, 0],
prev: 0,
speed: 0,
}
y = {
path: [0, 0, 0, 0, 0],
prev: 0,
speed: 0,
}
function calculatePath(data, value) {
data.path = [];
if (data.prev === value) {
data.speed = 0;
}
for (let i = 0; i < 5; i++) {
if (0 < value + data.speed * (i + 1)) {
data.speed -= 0.1;
data.path.push(-1);
} else if (value + data.speed * (i + 1) < -0) {
data.speed += 0.1;
data.path.push(1);
} else if (i > 0) {
if (0 < data.speed) {
data.speed -= 0.1;
data.path.push(-1);
} else if (data.speed < 0) {
data.speed += 0.1;
data.path.push(1);
} else {
data.path.push(0);
}
} else {
data.path.push(0);
}
}
data.prev = value;
}
function A() {
let range = parseFloat($("#range .rate").textContent.split(' '));
let yDistance = parseFloat($("#y-range .distance").textContent.split(' ')[0]);
let zDistance = parseFloat($("#z-range .distance").textContent.split(' ')[0]);
let rollError = parseFloat($("#roll .error").textContent);
let pitchError = parseFloat($("#pitch .error").textContent);
let yawError = parseFloat($("#yaw .error").textContent);
let rate = parseFloat($("#rate .rate").textContent.split(' ')[0]);
if (index % 5 === 0) {
calculatePath(roll, rollError);
calculatePath(pitch, pitchError);
calculatePath(yaw, yawError);
calculatePath(y, yDistance);
calculatePath(z, zDistance);
}
let rollStep = roll.path[index % 5];
if (0 < rollStep) {
keyPress(_rollLeft);
} else if (rollStep < 0) {
keyPress(_rollRigth);
}
let pitchStep = pitch.path[index % 5];
if (0 < pitchStep) {
keyPress(_up);
} else if (pitchStep < 0) {
keyPress(_down);
}
let yawStep = yaw.path[index % 5];
if (0 < yawStep) {
keyPress(_left);
} else if (yawStep < 0) {
keyPress(_rigth);
}
let yStep = y.path[index % 5];
if (0 < yStep) {
keyPress(_translateRigth);
} else if (yStep < 0) {
keyPress(_translateLeft);
}
let zStep = z.path[index % 5];
if (0 < zStep) {
keyPress(_translateUp);
} else if (zStep < 0) {
keyPress(_translateDown);
}
const rangeLimit = Math.min(Math.max((Math.abs(range) / 100), 0.05), 2);
if (-rate < rangeLimit) {
keyPress(_accelerator);
} else if (-rangeLimit < -rate) {
keyPress(_brake);
}
index++;
setTimeout(A, 200);
}
A();Собственно всё. Всем спасибо за прочтение :)
P.S.
Да, я немного хайпанул и поприкалывался. Не воспринимайте статью всерьез, я просто хотел почувствовать себя космонавтом [или летуном космическим], как Гагарин Юрий Алексеевич… Хотя это скорее инженерная работа Королёва Сергея Павловича, который к сожалению, так и не побывал в космосе, о котором мечтал…




















ZEvS_Poisk
Но ведь ПИД же есть. :)
amartology
Да не только ПИД, а в принципе хорошо разработанная теория автоматического управления. Для систем с обратной связью надо обеспечивать стабильность, что, по-хорошему требует некоторых теоретических выкладок и построения диаграмм Боде. Если все нормально посчитать, то никакого ухода в автоколебания не будет — и это именно такая задача, которую должна решать настоящая система автоматической стыковки.