

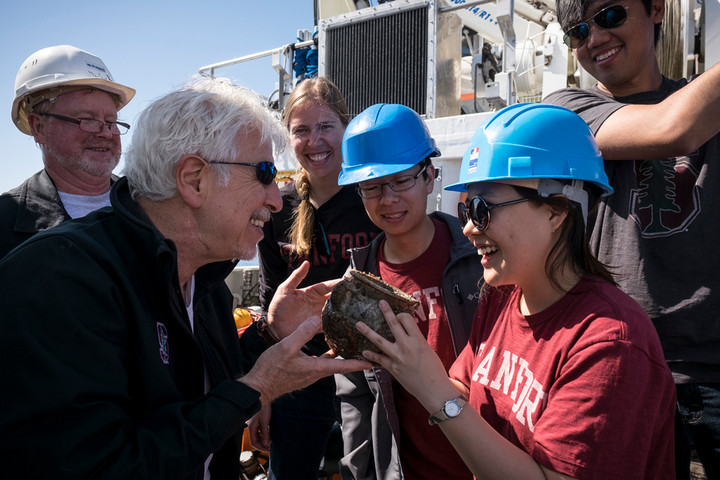
Изображение: Frederic Osada и Teddy Seguin/DRASSM
Полутораметровый робот OceanOne, построенный в Стэнфордском университете, оснащён стереоскопической камерой, манипуляторами с тактильной обратной связью и восемью двигателями. Интеллект робота позволяет выбрать нужную силу для удержания предметов, чтобы не повредить их. Сам по себе OceanOne — это аватар, который позволяет производить опасные работы с участием человека на суше, отмечает автор проекта Уссама Хатиб (Oussama Khatib).
Для проверки возможностей робота его отправили исследовать затонувший в 1664 году корабль «Луна», флагман флота короля Франции Людовика XIV, находящийся на глубине около сотни метров. OceanOne получил все имеющиеся данные о корабле и после погружения самостоятельно отправился в нужную сторону, избегая столкновений. С поверхности за роботом следил (с видом от первого лица) Хатиб — разработчик принял управление на себя после обнаружения небольшой вазы. Робот взял её и поместил внутрь корзины.

Подобные машины необходимы для работы в опасных для человека зонах, например — для исследования берега в районе Фукусимы. В Чернобыле люди жертвовали собой для ликвидации последствий аварии, и в будущем в подобных случаях именно роботы помогут сохранить огромное количество человеческих жизней.



Комментарии (15)


streltsovaleks
01.05.2016 10:04-2Настоящий робот-аватар — это русское изобретение (патент № 2134193 ru от 1997 года).
С описанием можно ознакомиться в открытом доступе в Интернете по ссылкам:
deepdivertech.narod.ru
&
streltsovaleks.narod.ru
А то, что показали американцы довольно примитивно — уже давно существуют подводные роботы с двумя манипуляторами — это не новость: aleksstreltsov3.narod.ru/AsKosmonauts.wmv
Американцы лишь прикрутили к роботу «человеческую» голову ( судя по видео неподвижную) и вытянули корпус робота (придали ему более обтекаемый вид). Казалось бы, немного.
Но это же американцы! Все бросились хвалить новое достижение! :-)

black_semargl
01.05.2016 10:04+1Робот-то гуманоид, а вот управление им какое-то совсем не гуманоидное.
Смотрят камерой со стороны, и руки джойстиками двигают.

devprodest
01.05.2016 15:20+1не вижу смысла делать гуманоидного робота для подобных задач, вполне хватило бы простого корпуса с манипуляторами. а так симпатично конечно
istui
Насколько мне известно, в Чернобыле пробовали применять роботизированные бульдозеры, поставленные из Японии, но в условиях высокого уровня ионизирующего излучения их аккумуляторы очень быстро разряжались. Интересно, как будут реагировать на ИИИ современные аккумуляторы, современная техника? Есть ли какой-то прогресс?
evilbot
В Чернобыле всё работало как надо. Бульдозеры были не на аккумуляторах. И, конкретно японская техника, показала себя с лучшей стороны.
Rumlin
там работало несколько моделей радиоуправляемых машин.
Murmurianez
Видел я недавно один из этих бульдозеров — сотрудники музея уверяли что ночью не светится) Если кому интересно — стоит в Москве в музее Индустриально культуры
AlexeiZavjalov
Вот этот, похоже:


Не уверен, что он участвовал в устранении аварии. Всего было построено 3 штуки, 2 были отправлены на ликвидацию. Этот стоит в другом музее:
Робот «Мобот-Ч-ХВ-2» на выставке техники, принимавшей участие в ликвидации аварии на Чернобыльской АЭС.
Rumlin
СТР-1 специальный робот на базе шасси лунохода

Фото других роботов на ЧАЭС —
Роботы, которые помогали людям в ликвидации последствий аварии на Чернобыльской АЭС
AlexeiZavjalov
Я про тот, что стоит в музее Индустриальной культуры написал
Vjatcheslav3345
Его использовали на Чернобыльской АЭС для очистки крыши и установки оборудования для радиационного обследования. Робот STR-1 работал на крыше Чернобыльской атомной электростанции, активно помогая чистить крышу АЭС от радиоактивного мусора. Ещё один робот-бульдозер зачищал мусор возле взорвавшегося реактора после больших бульдозеров, управляемых людьми.Работы велись при уровне радиации в 10 000 рентген в час. Возникает вопрос — получается, что эти роботы всего только помогали людям даже самых опасных зонах, не более а вовсе не принимали удар на себя, — если они убирали то, что не убрали бульдозеры, управляемые людьми? Я вот сомневаюсь, что «Мобот-Ч-ХВ-2» смог бы сам, нигде не застряв, даже просто забраться на крышу ЧАЭС — не помню её план точно, но вряд ли на ней были предусмотрены архитекторами спецпроезды и спецшахты с лифтовым оборудованием для подъема техники на крышу. И на современных АЭС это никому не приходит в голову — предусмотреть лёгкий доступ робототехники к любой части станции, в т. ч. — реактору.
Vjatcheslav3345
Даже ГОСТА или СНИПА нет, предусматривающего для роботов проектировать определенным образом проёмы, коридоры (чтобы проехать), перекрытия (чтобы не провалиться), лестницы (чтобы спуститься-подняться), лифтовые системы (чтобы перемещаться), ж/д пути и краны в здании (транспортировать, например, вагонетки с радиоактивными обломками — как в шахте), краны, клапаны, системы пожаротушения, подачи реагентов, воздуха, энергии и др. (чтобы подключаться и успешно работать) — вот сейчас, без этого инфраструктурного обеспечения, роботы и АЭС, проектируются и строятся, проектируются и строятся, проектируются и строятся, — а потом БАЦ! — и в горячую зону вновь пойдут люди, и хорошо, если они будут не в ватниках — а в завалявшихся старых антирадиационных костюмах для людей (а зачем нам новые костюмы покупать — у нас ведь вон сколько роботов по боксам распихано, тут старые костюмы надо бы вообще посписывать).
Rumlin
В хрониках видел большие «обычные» гусеничные бульдозеры — в кабине стояли электроприводы присоединенные к рычагам. Эта система позволяла дистанционно управлять бульдозером. Откуда управляли не помню. Вроде рядом был БТР откуда управляли бульдозером.

Вроде подобный трактор:
Vjatcheslav3345
Ну что ж — неплохо, что хоть это сделали. Возможно поэтому в музее старой техники Чернобыля мы и видим какие то — возможно — эти, БТР-ы
Однако смысл моих коментов в том, что надо считать аварию (т. н. «черный лебедь») вполне возможной и проектировать так её, чтобы одновременно и можно было бороться за живучесть при аварии и одновременно — работать в штатном режиме и — всё это с применение спецархитектурных решений. Например, те же ж/д подъезды к зданиям и ж/д проезды внутри зданий АЭС в обычное время можно применять для текущих грузоперевозок а в аварийное — для подвоза сверхтяжелой спасательной техники и разборочных машин для ликвидации завалов.
В штатном режиме можно обслуживать станцию именно той же робототехникой, которая будет задействоваться в аварийной ситуации (передвижные роботизированные платформы, манипуляторы, робопогрузчики и т. д.), а не обычной техникой — тренируя персонал управлению различными роботизированными механизмами (аварийная робототехника не должна пылиться в уголке — она должна быть в будничной работе, тогда она ещё и окупается) прямо в ходе обычной работы, а в аварийном — бороться роботами с последствиями аварии. Словом, нужно проектировать АЭС и действовать так, словно завтра — нужно будет разбирать завалы и охлаждать изолировать и вывозить в ж/д-спецконтейнерах кориумную лаву из её обрушенных зданий.