
Введение
Эта публикация дает простое и интуитивно понятное введение к вопросу об использовании фильтра Калмана. Публикация рассчитана на тех, кто слышал о фильтре Калмана, но не знает, как он работает, а также на тех, кто знает уравнения фильтра Калмана, но не знает, откуда они берутся.
Требуемые знания: знакомство с матричной алгеброй, нормальным многомерным распределением, ковариацией матриц и т. д.
Постановка задачи
Фильтр Калмана имеет множество применений в технике и экономике. Выберем не тривиальную задачу – отслеживание местоположения ракеты запущенyой из страны Y. Обозначим текущее местоположение ракеты
 как пару координат широты – a и долготы – b, на контурной карте это
как пару координат широты – a и долготы – b, на контурной карте это  .
.На данный момент времени, точные координаты х неизвестны, но мы можем определить вероятность нахождения ракеты в данной точке
 исходя из двумерной плотности вероятности
исходя из двумерной плотности вероятности  . Предполагая гауссовским закон распределения, значение плотности вероятности в точке можно записать в виде:
. Предполагая гауссовским закон распределения, значение плотности вероятности в точке можно записать в виде: (1)
(1)где:
 — распределение вероятности местоположения ракеты;
— распределение вероятности местоположения ракеты;? – ковариационная матрица 2?2.
В рассматриваемой модели:
 (2)
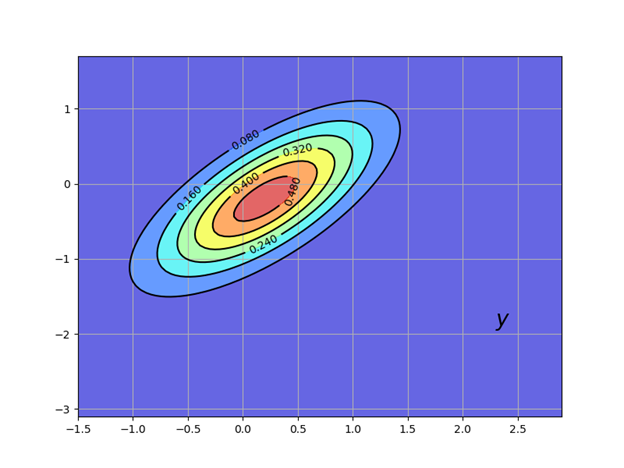
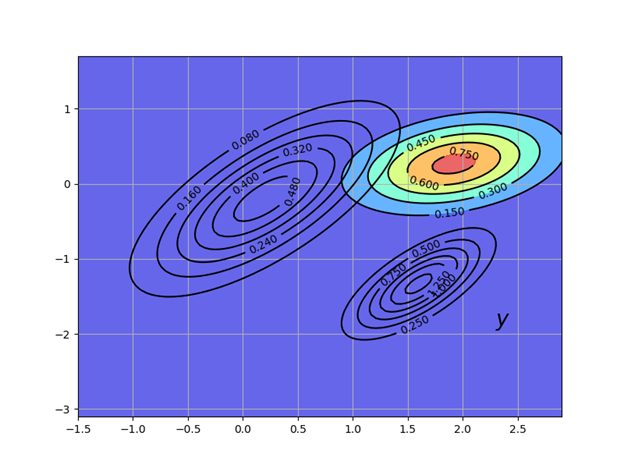
(2)Используем следующий листинг для построения на плоскости эллиптической области распределения вероятности с центром красного цвета.
Листинг решения
from scipy import linalg
import numpy as np
import matplotlib.cm as cm
from matplotlib.mlab import bivariate_normal
import matplotlib.pyplot as plt
# == Настройка гостовской плотности р == #
? = [[0.4, 0.3], [0.3, 0.45]]
? = np.matrix(?)
x_hat = np.matrix([0.2, -0.2]).T
# ==Определим матрицы G и R из уравнения y = G x + N(0, R) == #
G = [[1, 0], [0, 1]]
G = np.matrix(G)
R = 0.5 * ?
# == Матрицы A и Q== #
A = [[1.2, 0], [0, -0.2]]
A = np.matrix(A)
Q = 0.3 * ?
# == Матрицы A и Q == #
y = np.matrix([2.3, -1.9]).T
# == Настройка сетки для построения графика== #
x_grid = np.linspace(-1.5, 2.9, 100)
y_grid = np.linspace(-3.1, 1.7, 100)
X, Y = np.meshgrid(x_grid, y_grid)
def gen_gaussian_plot_vals(?, C):
"µTorrent.lnk "
m_x, m_y = float(?[0]), float(?[1])
s_x, s_y = np.sqrt(C[0, 0]), np.sqrt(C[1, 1])
s_xy = C[0, 1]
return bivariate_normal(X, Y, s_x, s_y, m_x, m_y, s_xy)
#Построить график
fig, ax = plt.subplots(figsize=(8,6))
ax.grid()
Z = gen_gaussian_plot_vals(x_hat, ?)
ax.contourf(X, Y, Z, 6, alpha=0.6, cmap=cm.jet)
cs = ax.contour(X, Y, Z, 6, colors="black")
ax.clabel(cs, inline=1, fontsize=10)
plt.show()Получим:

Определение шага фильтрации
Датчики, установленные на ракете, сообщают координаты её текущего положения
 . Поместим эту точку на график с помощью следующего листинга.
. Поместим эту точку на график с помощью следующего листинга.Листинг решения
fig, ax = plt.subplots(figsize=(8, 6))
ax.grid()
Z = gen_gaussian_plot_vals(x_hat, ?)
ax.contourf(X, Y, Z, 6, alpha=0.6, cmap=cm.jet)
cs = ax.contour(X, Y, Z, 6, colors="black")
ax.clabel(cs, inline=1, fontsize=10)
ax.text(float(y[0]), float(y[1]), "$y$", fontsize=20, color="black")
plt.show()Получим:
Датчики неточны поэтому мы должны интерпретировать выход нашего датчика не как
 , а следующим образом:
, а следующим образом: (3)
(3)Здесь матрицы G и R имеют размерность 2?2, а матрица R содержит только положительные элементы. Помеха в виде шумов –
 , не зависит от измеряемых координат –
, не зависит от измеряемых координат –  .
.Для объединения плотности вероятности
 и полученного соотношения для y воспользуемся уравнением Байеса используя безусловную и условную
и полученного соотношения для y воспользуемся уравнением Байеса используя безусловную и условную  вероятности:
вероятности:
где:

Для определения
воспользуемся следующими соотношениями и условиями:- ;
- с учётом соотношения (3), относительная вероятность
 равна
равна  ;
;  не зависит от и входит в вычисления только как нормализующая постоянная.
не зависит от и входит в вычисления только как нормализующая постоянная.
Поскольку мы находимся в линейной и гауссовой структуре, обновленная плотность может быть вычислена путем вычисления линейных регрессий; в частности, известно решение [1]:

где:

 (4)
(4)где:
 — матрица коэффициентов регрессии.
— матрица коэффициентов регрессии.Эта новая плотность
 показана на следующем рисунке через контурные линии и цветовую карту. Первоначальная плотность оставлена в виде контурных линий для сравнения.
показана на следующем рисунке через контурные линии и цветовую карту. Первоначальная плотность оставлена в виде контурных линий для сравнения.Листинг решения
fig, ax = plt.subplots(figsize=(8, 6))
ax.grid()
Z = gen_gaussian_plot_vals(x_hat, ?)
cs1 = ax.contour(X, Y, Z, 6, colors="black")
ax.clabel(cs1, inline=1, fontsize=10)
M = ? * G.T * linalg.inv(G * ? * G.T + R)
x_hat_F = x_hat + M * (y - G * x_hat)
?_F = ? - M * G * ?
new_Z = gen_gaussian_plot_vals(x_hat_F, ?_F)
cs2 = ax.contour(X, Y, new_Z, 6, colors="black")
ax.clabel(cs2, inline=1, fontsize=10)
ax.contourf(X, Y, new_Z, 6, alpha=0.6, cmap=cm.jet)
ax.text(float(y[0]), float(y[1]), "$y$", fontsize=20, color="black")
plt.show()Получим:

Наша новая плотность «закручивает» предыдущую
в направлении, определяемом новой информацией  .
.При генерации фигуры мы устанавливаем G как единичную матрицу и

, матрица для
 согласно соотношению (2).
согласно соотношению (2).Прогноз на шаг вперёд
Подведём промежуточные итоги. Нами получено вероятное текущее положение ракеты с использованием информации о начальном и текущем её положении. Это имеет название фильтрация, но не прогнозирование, поскольку фильтруем от шума, но не можем предсказать местоположение ракеты в следующий момент времени.
Давайте предположим, что нам поставлена другая задача: предсказать местоположение ракеты после истечения единицы времени, не имея никакой информации о новом её местоположении.
Для решения этой задачи используем линейную гауссовою модель вида:
 (5)
(5)Наша цель – объединить этот закон движения и наше текущее распределение
, чтобы придумать новое предсказательное распределение для местоположения ракеты за одну единицу времени.Ввиду (5) все, что нам нужно сделать, – ввести случайный вектор
 и выработать распределение
и выработать распределение  , где w не зависит от
, где w не зависит от  и имеет распределение
и имеет распределение 
Поскольку в (5) используются линейные комбинации случайных переменных с гауссовыми распределениями, то и
также является гауссовой переменной.После преобразований соотношений (4) с учётом введенных переменных получим:



Матрица
 часто записывается как
часто записывается как  и называется усилением Кальмана. Добавлен индекс , напоминающий нам, что зависит от , но не зависит от
и называется усилением Кальмана. Добавлен индекс , напоминающий нам, что зависит от , но не зависит от  или
или Используя эти обозначения, мы можем суммировать наши результаты следующим образом. Наше обновленное предсказание – имеет плотность вероятности
 , где:
, где:
 (6)
(6)Плотность
 называется прогностическим распределением. Прогностическое распределение – это новая плотность, показанная на следующем рисунке, где использованы обновлённые параметры:
называется прогностическим распределением. Прогностическое распределение – это новая плотность, показанная на следующем рисунке, где использованы обновлённые параметры:
Листинг решения
fig, ax = plt.subplots(figsize=(8,6))
ax.grid()
# Плотность 1
Z = gen_gaussian_plot_vals(x_hat, ?)
cs1 = ax.contour(X, Y, Z, 6, colors="black")
ax.clabel(cs1, inline=1, fontsize=10)
# Плотность 2
M = ? * G.T * linalg.inv(G * ? * G.T + R)
x_hat_F = x_hat + M * (y - G * x_hat)
?_F = ? - M * G * ?
Z_F = gen_gaussian_plot_vals(x_hat_F, ?_F)
cs2 = ax.contour(X, Y, Z_F, 6, colors="black")
ax.clabel(cs2, inline=1, fontsize=10)
# Плотность 3
new_x_hat = A * x_hat_F
new_? = A * ?_F * A.T + Q
new_Z = gen_gaussian_plot_vals(new_x_hat, new_?)
cs3 = ax.contour(X, Y, new_Z, 6, colors="black")
ax.clabel(cs3, inline=1, fontsize=10)
ax.contourf(X, Y, new_Z, 6, alpha=0.6, cmap=cm.jet)
ax.text(float(y[0]), float(y[1]), "$y$", fontsize=20, color="black")
plt.show()Получим:
Рекурсивная процедура
Давайте посмотрим на то, что мы сделали. Мы начали текущий период с
для размещения координат ракеты. Затем мы использовали текущее измерение для обновления вероятности до. Наконец, мы использовали закон движения (5) для  обновить до
обновить до  .
.Если мы сейчас переходим к следующему периоду, мы снова готовы взять
в качестве предшествующего периода. Обозначая  для и
для и  для , полная рекурсивная процедура состоит:
для , полная рекурсивная процедура состоит:- Начинаем текущий период с предшествующего

- Получаем текущее измерение

- Вычислить распределение фильтрации
 из
из и, применяя правило Байеса и условное распределение (3) ;
и, применяя правило Байеса и условное распределение (3) ; - Вычислить прогностическое распределение
 из фильтрационного распределения (5);
из фильтрационного распределения (5); - Приращение t на единицу и переход к шагу 1.
Повторяя (6), динамика для
 и
и  выглядит следующим образом:
выглядит следующим образом:
 (7)
(7)Это стандартные динамические уравнения для фильтра Калмана (см., например, [2], с. 58)
Конвергенция
Матрицa
является мерой неопределенности нашего предсказания из  . Помимо особых случаев, эта неопределенность никогда не будет полностью решена, независимо от того, сколько времени истекает.
. Помимо особых случаев, эта неопределенность никогда не будет полностью решена, независимо от того, сколько времени истекает.Одна из причин заключается в том, что наше предсказание
составлено на основе информации, доступной в t-1, а не t. Даже если мы знаем точное значение  (чего мы не делаем), из уравнения перехода (5) следует, что:
(чего мы не делаем), из уравнения перехода (5) следует, что:
Поскольку
 не наблюдается при t-1, в любое время предсказание повлечет за собой некоторую ошибку (если не вырождается).
не наблюдается при t-1, в любое время предсказание повлечет за собой некоторую ошибку (если не вырождается).Однако, конечно, возможно, что
сходится к постоянной матрице при  . Чтобы изучить эту тему, давайте разберем второе уравнение в (7):
. Чтобы изучить эту тему, давайте разберем второе уравнение в (7): (8)
(8)Это нелинейное разностное уравнение для
. Фиксированная точка (8) является постоянной матрицей ? такой, что:
Уравнение (8) известно, как разностное уравнение Риккати дискретного времени. Уравнение (9) называется дискретным временным алгебраическим уравнением Риккати.
Условия, при которых существует неподвижная точка и сходящаяся к ней последовательность
 , обсуждаются в [3] и [4], глава 4.
, обсуждаются в [3] и [4], глава 4.Достаточным (но не необходимым) условием является то, что все собственные значения
 матрицы A удовлетворяют
матрицы A удовлетворяют  (см., например, [4], стр. 77). Это сильное условие гарантирует, что безусловное распределение сходится при
(см., например, [4], стр. 77). Это сильное условие гарантирует, что безусловное распределение сходится при  .
.В этом случае для любого начального выбора
 , неотрицательного и симметричного, последовательность в (8) сходится к неотрицательной симметрической матрице
, неотрицательного и симметричного, последовательность в (8) сходится к неотрицательной симметрической матрице  , которая является решением (9).
, которая является решением (9).Реализация
Класс Kalman из пакета QuantEcon.py реализует фильтр Kalman на основе линейной модели пространства состояний следующего вида:


Приведём переход переменных к принятым в публикации обозначениям:

Класс Kalman из пакета QuantEcon.py [5] имеет ряд методов, приведём те, которые относятся к данной публикации:
- before_to_filtered, метод обновляет
 до
до  ;
; - filter_to_forecast, метод обновляет распределение фильтрации до прогнозирующего распределения – которое становится новым ранее
 ;
; - update, обновление, которое сочетает в себе последние два метода;
- stationary_values, метод вычисляет решение уравнения (9) и соответствующее (стационарное) усиление Кальмана.
Примеры использования класса Kalman из пакета QuantEcon.py
Пример 1
Рассмотрим следующее простое применение фильтра Калмана взятое из [2], раздел 2.9.2. Предположим, что все переменные являются скалярами, скрытое состояние
фактически является постоянным, равным некоторому значению  . Динамика состояний отражена в выражении (5) с
. Динамика состояний отражена в выражении (5) с ,
,  и
и  . Уравнение измерения:
. Уравнение измерения:  , где
, где  равно
равно  .
.Задача этого примера с использованием kalman.py построить первые пять предсказательных плотностей
 . При моделировании использовать следующие значения переменных
. При моделировании использовать следующие значения переменных  .
.Листинг решения
from quantecon import Kalman
import numpy as np
from quantecon import LinearStateSpace
import matplotlib.pyplot as plt
from scipy.stats import norm
# == параметры == #
? = 10 # Постоянное значение состояния x_t
A, C, G, H = 1, 0, 1, 1
ss = LinearStateSpace(A, C, G, H, mu_0=?)
# ==задание до инициализации фильтра Калмана == #
x_hat_0, ?_0 = 8, 1
kalman = Kalman(ss, x_hat_0, ?_0)
# == наблюдение за измерением в модели пространства состояний== #
N = 5
x, y = ss.simulate(N)
y = y.flatten()
# == настроить график == #
fig, ax = plt.subplots(figsize=(8,6))
xgrid = np.linspace(? - 5, ? + 2, 200)
for i in range(N):
# == записать текущее прогнозируемое среднее и дисперсию== #
m, v = [float(z) for z in (kalman.x_hat, kalman.Sigma)]
# =обновление фильтра == #
ax.plot(xgrid, norm.pdf(xgrid, loc=m, scale=np.sqrt(v)), label=f'$t={i}$')
kalman.update(y[i])
ax.set_title(f'Первые {N} распределений плотности вероятности \n при $\\theta = {?:.1f}$')
ax.legend(loc='upper left')
plt.show()Получим:

Как показано в [2], в разделах 2.9.1-2.9.2, эти распределения асимптотически приближаются к неизвестному значению
 .
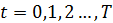
.Пример 2
На предыдущем графике приведена некоторая поддержка идеи о том, что интеграл плотности вероятности сходится к
.Чтобы проверить идею, нужно выбрать небольшое
 и вычислить интеграл:
и вычислить интеграл:
для
 .
.Листинг решения
from quantecon import Kalman
from numpy import*
from quantecon import LinearStateSpace
from scipy.stats import norm
import matplotlib.pyplot as plt
from scipy.integrate import quad
? = 0.1
? = 10 # Постоянное значение состояния x_t
A, C, G, H = 1, 0, 1, 1
ss = LinearStateSpace(A, C, G, H, mu_0=?)
x_hat_0, ?_0 = 8, 1
kalman = Kalman(ss, x_hat_0, ?_0)
T = 600
z = empty(T)
x, y = ss.simulate(T)
y = y.flatten()
for t in range(T):
# Запись текущего предсказанного среднего, дисперсии их плотности распределения
m, v = [float(temp) for temp in (kalman.x_hat, kalman.Sigma)]
f = lambda x: norm.pdf(x, loc=m, scale=sqrt(v))
integral, error = quad(f, ? - ?, ? + ?)
z[t] = 1 - integral
kalman.update(y[t])
fig, ax = plt.subplots(figsize=(8, 6))
ax.set_ylim(0, 1)
ax.set_xlim(0, T)
ax.plot(range(T), z)
ax.fill_between(range(T), zeros(T), z, color="blue", alpha=0.2)
plt.show()Получим:
Пример 3
Как обсуждалось выше, последовательность
 не вырождена, то в общем случае невозможно предсказать без ошибок в момент времени t-1 (и это было бы так, даже если бы мы могли наблюдать ). Давайте теперь сравним предсказание , сделанное фильтром Калмана, против конкурента, которому разрешено наблюдать .
не вырождена, то в общем случае невозможно предсказать без ошибок в момент времени t-1 (и это было бы так, даже если бы мы могли наблюдать ). Давайте теперь сравним предсказание , сделанное фильтром Калмана, против конкурента, которому разрешено наблюдать .Этот конкурент будет использовать условное ожидание
 , которое в этом случае является
, которое в этом случае является  .. Известно, что условное ожидание является оптимальным методом прогнозирования с точки зрения минимизации среднеквадратической ошибки. (Точнее, минимизатор
.. Известно, что условное ожидание является оптимальным методом прогнозирования с точки зрения минимизации среднеквадратической ошибки. (Точнее, минимизатор  по g равен
по g равен  ).
).Таким образом, мы сравниваем фильтр Калмана с конкурентом, который имеет больше информации (в смысле возможности наблюдать скрытое состояние) и ведет себя оптимально с точки зрения минимизации квадратичной ошибки. Наши переходы будут оцениваться по квадрату ошибки.
В частности, ваша задача состоит в том, чтобы генерировать график, отображающий наблюдения как
 , так и
, так и  против t при t=1,...,50.
против t при t=1,...,50.Для параметров задайте
 ,
,  и
и  , где I — тождество 2 ? 2.
, где I — тождество 2 ? 2.Задать
 .
.Чтобы инициализировать предыдущую плотность, следует установить:
 .
.и
 .
.Наконец, установите
 .
.Листинг решения
from scipy.linalg import eigvals
from quantecon import Kalman
import numpy as np
from quantecon import LinearStateSpace
import matplotlib.pyplot as plt
# === Определение A, C, G, H === #
G = np.identity(2)
H = np.sqrt(0.5) * np.identity(2)
A = [[0.5, 0.4],
[0.6, 0.3]]
C = np.sqrt(0.3) * np.identity(2)
# === Настроить модель пространства состояний, начальное значение x_0 установить на ноль=== #
ss = LinearStateSpace(A, C, G, H, mu_0 = np.zeros(2))
# === Определить предыдущую плотность=== #
? = [[0.9, 0.3],
[0.3, 0.9]]
? = np.array(?)
x_hat = np.array([8, 8])
# === Инициализировать фильтр Калмана === #
kn = Kalman(ss, x_hat, ?)
# == Печатать собственные значения A == #
print("Собственные значения A:")
print(eigvals(A))
# == Печать стационарная ?== #
S, K = kn.stationary_values()
print("Дисперсия ошибки стационарного прогноза:")
print(S)
# === Создать сюжет=== #
T = 50
x, y = ss.simulate(T)
e1 = np.empty(T-1)
e2 = np.empty(T-1)
for t in range(1, T):
kn.update(y[:,t])
e1[t-1] = np.sum((x[:, t] - kn.x_hat.flatten())**2)
e2[t-1] = np.sum((x[:, t] - A @ x[:, t-1])**2)
fig, ax = plt.subplots(figsize=(9,6))
ax.plot(range(1, T), e1, 'k-', lw=2, alpha=0.6, label='Ошибка фильтра Калмана')
ax.plot(range(1, T), e2, 'g-', lw=2, alpha=0.6, label='Условная математическая ошибка')
ax.legend()
plt.show()Получим:
Собственные значения A:
[ 0.9+0.j -0.1+0.j]
Дисперсия ошибки стационарного прогноза:
[[0.40329108 0.1050718 ]
[0.1050718 0.41061709]]

Пример 4
Попробуйте изменить коэффициент 0.3 в Q=0.3I вверх и вниз. Для Q=0.5I получим:
Собственные значения A:
[ 0.9+0.j -0.1+0.j]
Дисперсия ошибки стационарного прогноза:
[[0.62286148 0.12527948]
[0.12527948 0.63270989]]

Для Q=0.1I получим:
Собственные значения A:
[ 0.9+0.j -0.1+0.j]
Дисперсия ошибки стационарного прогноза:
[[0.16433113 0.06508848]
[0.06508848 0.16752408]]

Заметим, как диагональные значения в стационарном решении
(см. (9)) возрастают и убывают в соответствии с этим коэффициентом.Интерпретация заключается в том, что большая случайность в законе движения для приводит к большей (постоянной) неопределенности в прогнозировании.
- C. M. Bishop. Pattern Recognition and Machine Learning. Springer, 2006.
- L Ljungqvist and T J Sargent. Recursive Macroeconomic Theory. MIT Press, 4 edition, 2018.
- E. W. Anderson, L. P. Hansen, E. R. McGrattan, and T. J. Sargent. Mechanics of Forming and Estimating Dynamic Linear Economies. In Handbook of Computational Economics. Elsevier, vol 1 edition, 1996.
- D. B. O. Anderson and J. B. Moore. Optimal Filtering. Dover Publications, 2005.
- kalman.py.https://github.com/QuantEcon/QuantEcon.py/blob/master/quantecon/kalman.py
Beaglz
Еще про прикладную магию Калмана посредством Excel можно почитать здесь
www.mathfinance.cn/kalman-filter-example