
Наверное, у каждого, кто изучал теорию автоматического управления, в душе не раз появлялись сомнения, каким образом эти два, три или даже десять квадратиков передаточных функций в модели, представляют собой динамику сложного агрегата, типа ядерного реактора или авиационного двигателя. Нет ли здесь обмана? Возможно то, что работает с простыми моделями перестанет работать со сложными моделями и в «реальной» жизни.
В этой статье мы будем экспериментировать с «настоящей» моделью авиационного двигателя. Обвесив ее «реальными» моделями аппаратуры и алгоритмов управления от атомной станции.
Изначально модель была написана на фортране и предназначена для каких-то высоконаучных целей, связанных с системами управления двигателями. Эту модель нам передали в качестве примера и наша задача заключалась в том, чтобы повторить модель в структурном виде и доказать, что она совпадает с исходной. Что и было сделано.
Как только модель превратилась из листинга Fortran в структурную схему, с ней стало просто и удобно работать, проводя любые, самые «изощренные» эксперименты. Совершенно не случайно у меня оказались реальные алгоритмы управления АЭС. Что позволило быстро собрать модель для экспериментов, не используя при этом никаких формул, да да, только картинки.

Модель двигателя
Модель представляет собой набор типовых блоков, настроенных на моделирование различных компонентов конкретного двигателя. В предыдущей статье мы разбирали газотурбинный двигатель, в котором полезная мощность снимается с помощью вала. В турбореактивном двигателе полезная мощность это реактивная тяга, но управлять мы будем оборотами.
Общая схема модели приведена на рисунке 1.
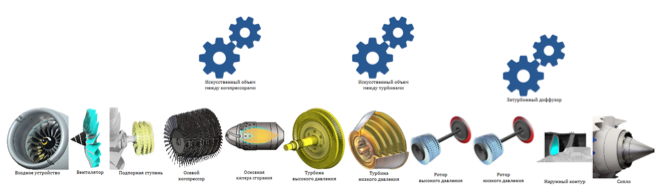
Рисунок 1. Схема струкутрной модели турбореактивного двигателя.
Несмотря на то, что схема модели выглядит как россыпь трехмерных деталей, на самом деле – это набор структурных элементов, связанных между собой.
В качестве эксперимента мы, как и в предыдущей статье, попробуем управлять подачей топлива для получения нужных оборотов.
Для этого нам нужна камера сгорания, в свойствах которой мы находим расход топлива – то, что мы будем менять. А в параметрах у камеры есть давление на входе, которое рассчитывается в данном блоке. (см. рис. 2 и 3)
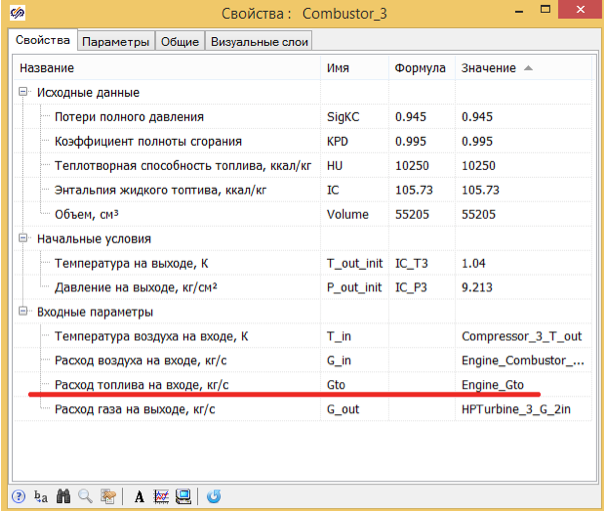
Рисунок 2. Свойства камеры сгорания.
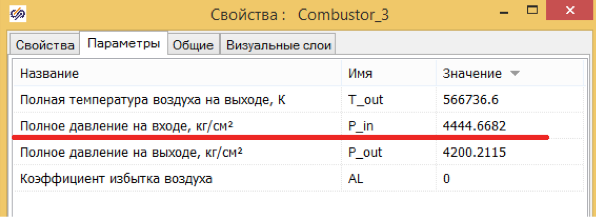
Рисунок 3. Параметры камеры сгорания.
В качестве регулируемой частоты оборотов возьмем обороты вала низкого давления. Мне кажется, что его обороты имеют более сложную зависимость от давления подачи топлива, чем обороты вала высокого давления, на который воздействуют газы после камеры сгорания.
Модель подачи топлива
В оригинальной модели подача топлива задается в кг/с, как граничные условия для моделирования, в виде табличной функции от времени. Мы же хотим создать близкую к “реальной” модель, поэтому воспользуемся предложением из предыдущей статьи и создадим гидравлическую модель подачи топлива, из трубы и электроклапана.
В качестве модели мы зададим трубу диаметром 10 мм, на которую поставим электрический клапан. Давление на одной стороне трубы задаём постоянным, считая что там работает топливный насос. Давление на другой стороне будем брать из модели двигателя. В конце трубы добавим сужение в 2 раза, что бы сымитировать форсунки. (Рис. 4)

Рисунок 4. Модель подачи топлива в двигатель.
В модель закладывается зависимость изменения гидравлического сопротивления клапана от положения клапана.
Такая модель позволит нам учитывать влияние давления в камере сгорания на расход топлива, обеспечивая обратную связь.Когда мы повышаем расход топлива, у нас поднимается давление в камере сгорания и, соответственно, перепад между топливным насосом и камерой сгорания уменьшается, что приводит к снижению расхода топлива.
Расходы по трубе определяются путем решения нестационарного уравнения течения жидкости с учетом трения, вязкости, плотности и прочих физических эффектов, описание которых займет пару – тройку страниц формул.
Модель управления
Чтобы смоделировать реальную систему управления, мы возьмем модель регулятора подачи пара в турбину из проекта управления АЭС. Не просто ПИД, который выдает нам положение клапана, а честную модель, в которой есть:
- Моделирование работы двигателя привода с учетом зоны не чувствительности, задержек, скоростью открытия и закрытия.
- РПИ (реле преобразования импульсов) – нелинейный блок, обеспечивающий преобразования управляющего воздействия в команды «открыть» и «закрыть».
- ПИД регулятор.
- Инерционность датчика оборотов.
Для описания всех перечисленных блоков и моделей потребуется еще страниц сто пятьдесят текста, поэтому просто приведем картинки с минимальными пояснениями.
Модель клапана
Представляет собой модель двигателя и локальной системы управления.
Двигатель это хитрый интегратор, который обрабатывает команды «открыть» и «закрыть» с учетом заданной скорости движения возможных воздействий, отказов в питании и т.п. (см. рис. 5) На выходе из этого блока рассчитывается положение клапана в каждый момент времени моделирования процесса
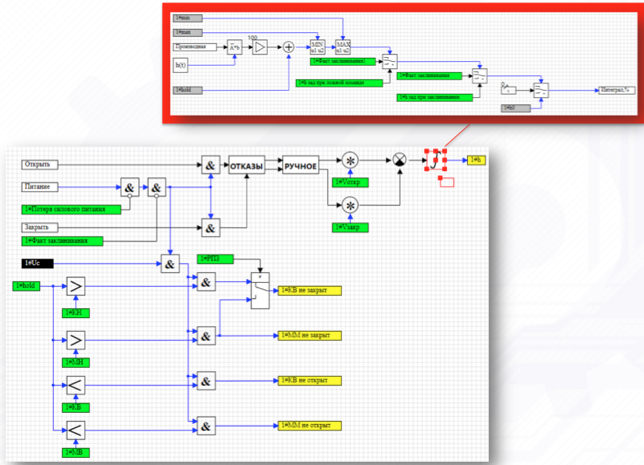
Рисунок 5. Модель электродвигателя
Для управления электродвигателем клапана используется блок управления клапаном (БУК), который обеспечивает логическую обработку входящих команд и возможных заданных отказов, а также вырабатывает все необходимые сигналы для индикации и систем управления. (см. рис. 6)
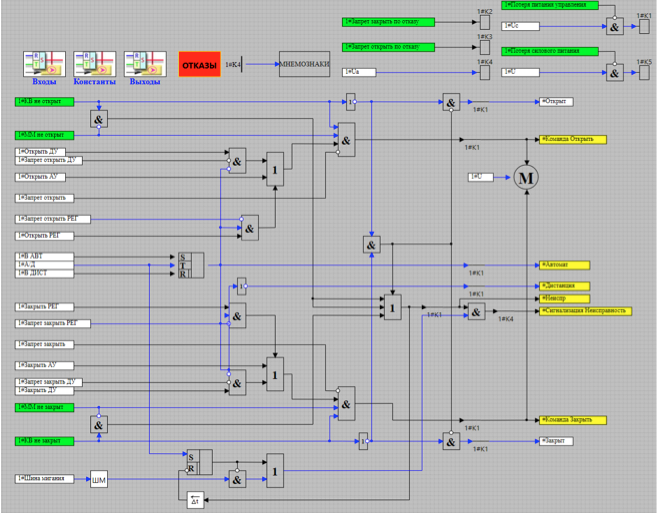
Рисунок 6. Модель блока управления клапаном (БУК)
Схемы на рисунках 5-6 – это типовые библиотечные схемы для моделирования АЭС. Эти блоки не меняются пользователем, а берутся готовыми и используются для создания алгоритмов управления. Алгоритмы управления создаются в виде листов. В нашем случае лист алгоритма управления клапаном представлен на рисунке 7.
Непосредственное формирование команды «открыть» или «закрыть» (Больше, Меньше) осуществляется в блоке релейного преобразования импульсов (РПИ). Данный блок может быть выполнен как на «железной логике» (транзисторы, реле, усилители), так и в виде программы.
На вход блока РПИ подается рассогласование, рассчитанное блоком ПИД в виде процентов отклонения. Сам блок на основании этих данных формирует импульсы «открыть» или «закрыть» (Больше, Меньше) для блока управления клапаном. Схема блока РПИ приведена на рисунке 8.
Алгоритм регулирования оборотов представлен на рисунке 9.
В качестве исходных данных для расчета регулятора давления используется заданная величина оборотов и показания датчика.
Сам алгоритм ПИД представлен на рисунке 10.
Датчик оборотов учитывает задержку, инерционность и погрешность реального датчика. Схема модели датчика представлена на рисунке 11.
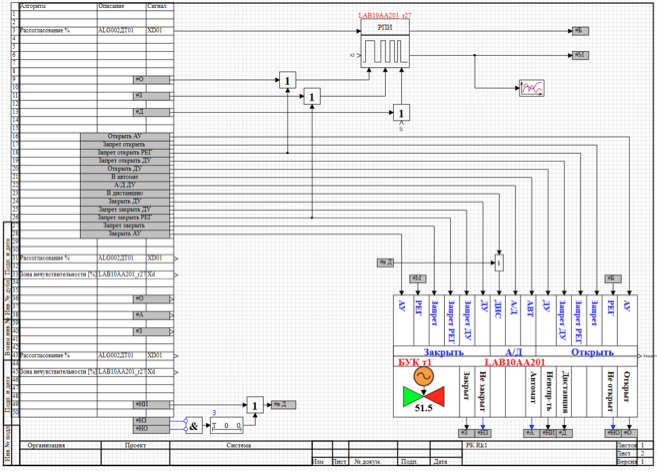
Рисунок 7. Алгоритм управления клапаном
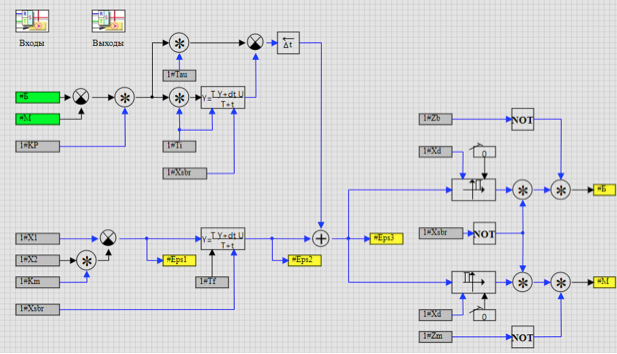
Рисунок 8. Схема блока РПИ
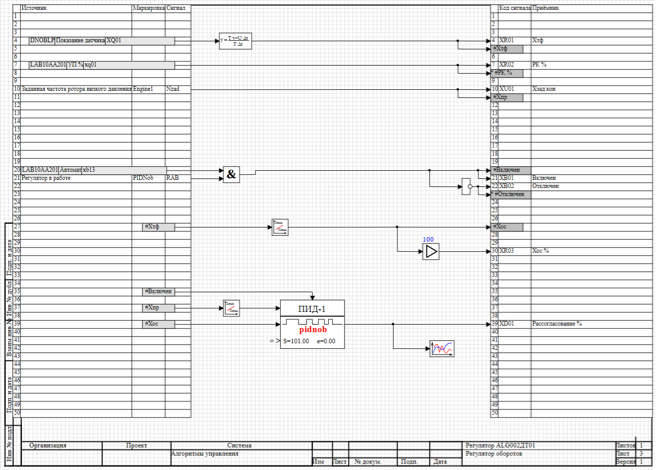
Рисунок 9. Алгоритм регулятора управления
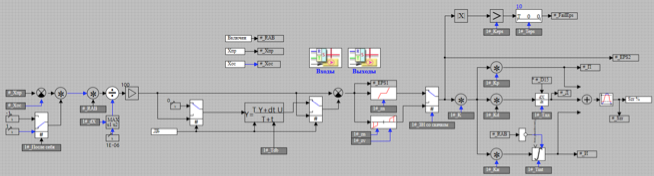
Рисунок 10. Регулятор ПИД
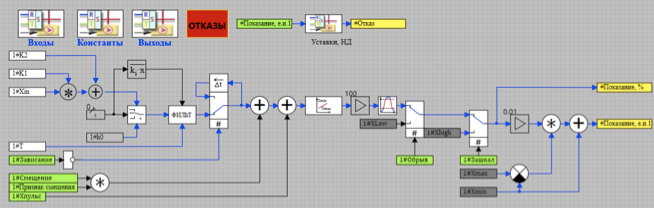
Рисунок 11. Модель датчика
Как мы видим, модель достаточно подробная (более тысячи блоков) и совсем не линейная.
Поскольку в данном эксперименте мы исследуем саму возможность оптимизации и управления сложными системами, для нас важна подробность математической модели, с точки зрения ее нелинейности и комплексности. Поэтому такая «дикая» комбинация реальной программы управления от регуляторов АЭС и «реальной» модели двигателя как раз и формирует задачу для проверки регуляторов сложными моделями.
- В системе управления используются следующие настройки:
- время полного открытия и закрытия клапана — 10 секунд
- диапазон регулирования оборотов двигателя — 1500 — 4000 об/мин
- зона нечувствительности для регулятора — 1%
Настройка модели и численный эксперимент
Модель, которую мы исследуем, описывает только двигатель. А все управляющие воздействия, такие как расход топлива, углы поворота направляющего аппарата, коэффициенты расхода и т.п., заданы в виде функций, изменяющихся во времени. Мы создали «более честную» модель подачи топлива и пытаемся ее подключить к модели двигателя. План численного эксперимента следующий:
- вывести модель двигателя на номинальные обороты;
- переключить подачу топлива на созданную систему управления;
- произвести регулирования оборотов.
На рисунке 12 приведена схема управления для проведения численного эксперимента.
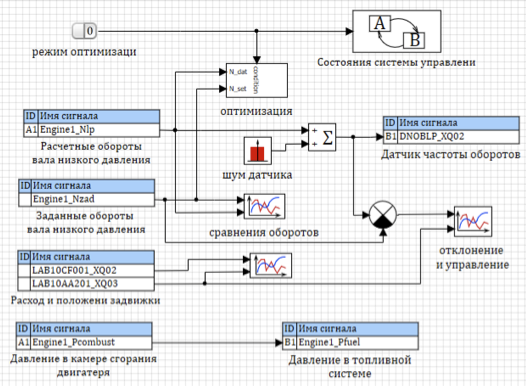
Рисунок 12. Модель управления численным экспериментом
Модель может работать в режиме оптимизации или в режиме управления.
При включенном режиме оптимизации работает блок оптимизация, в выключенном режиме он не участвует в расчете.
Все модели, связанные в единый пакет, считаются синхронно обменивающимися данным через базу данных сигналов. В проекте управления расчетом, осуществляется перенос данных из одной модели в другую. В частности, давление из камеры сгорания двигателя передается в давление на выходе из топливной системы, а рассчитанные обороты вала низкого давления передаются в модель датчика для учета в системе управления.
Для имитации неточности измерения оборотов к рассчитанному значению оборотов вала добавляется белый шум.
Заданные обороты передаются в блок оптимизации. Для контроля качества переходного процесса используются графики расхода и положения клапана.
Система управления выполнена в виде конечного автомата с тремя состояниями (см. рис. 13):
- Разгон двигателя. В этом состоянии модель двигателя работает независимо от топливной системы, и расход топлива задается в виде кусочно-линейной функции. Регулятор выключен, а рассчитанные обороты вала низкого давления передаются в заданные обороты В зависимости от сигнала верхнего уровня переход может происходить либо в состояние оптимизация, либо в состояние управление.
- Оптимизация. В этом состоянии расход топлива берется из гидравлической модели и передается в модель двигателя. ПИД регулятор включен и регулирует положение клапана. Коэффициенты ПИД регулятора берутся из блока оптимизации и применяются к регулятору в режиме оптимизации. В качестве тестового воздействия задается изменение оборотов двигателя.
- Управление. Точно такой же как оптимизация, за исключением передачи коэффициентов в ПИД регулятор.
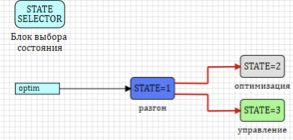
Рисунок 13. Конечные автоматы системы управления двигателем

Рисунок 14. Состояния «Разгон двигателя» и «Оптимизация»
Настройку регулятора проводят методом оптимизации. Схема блока оптимизации приведена на рисунке 15. В зависимости от того, какой блок управления используется в системе для управления, блок оптимизации подбирает значения либо для блока ПИД, либо для блока нечеткого регулирования.
При настройке белый шум не учитывается (в блоке задан как 0).

Рисунок 15. Блок оптимизации регуляторов
Результаты моделирования
Для подбора коэффициентов ПИД регулятора используется следующий процесс:
В течении 10 секунд разгон совершается с использованием заранее рассчитанной кривой расхода топлива. Частота вращения вала низкого давления в конце разгона составляет 3564 об/мин.
На 10 секунде расчета происходит переключение автомата состояния. С этого момента расход топлива берется из гидравлической модели, а заданная частота для регулятора составляет 3600 об/мин.
На 20 секунде расчета изменяется заданная частота — 3900 об/мин.
Таким образом, регулятор должен отработать ступеньку в 36 об/мин на 10 секунде расчета и ступеньку 300 об/мин на 30 секунде расчета.
Настроенный ПИД регулятор успешно справляется с данной задачей с учетом того, что на 10 секунде, кроме скачка оборотов, происходит и скачок расхода топлива в момент переключения на гидравлическую модель (см. рис. 16)

Рисунок 16. Обороты и процес управления для ПИД регулятора
Для создания регулятора на базе нечеткой логики и чистоты эксперимента мы используем тот же самый уже настроенный регулятор ПИД (см. рис. 10), в который добавляем модель регулятора на базе нечеткой логики и заменяем выход регулятора – вместо ПИД подаем сигнал, полученный в нечеткой логике.
Таким образом, все остальные параметры, связанные с нормализацией, зоной нечуствительности, работой РПИ остаются такими же, как и для ПИД.
Выход регулятора, такой же как и выход для ПИД, — рассогласование в процентах.
И сам регулятор ПИД мы оставили, чтобы можно было сравнить, какие воздействия выдаются регуляторами. (см. рис. 17)

Рисунок 17. Превращение ПИД в Fuzzy Logic
Сам регулятор выглядит так же, как и в первой статье. (см. рис 18). На вход подается рассогласование, численным методом определяется первая и вторая производные рассогласования и используется простая база из трех правил:
- Если меньше и уменьшается и замедляется => уменьшать.
- Если норма и постоянна и не изменяется => не изменять.
- Если больше и увеличивается и ускоряемся => увеличивать.

Рисунок 18. Схема нечеткого регулятора.
Для настройки мы используем те же самые переменные, которые использовали в первой статье, – это диапазоны отклонения первой и второй производной отклонения.
После оптимизации запускаем такой же переходный процесс.
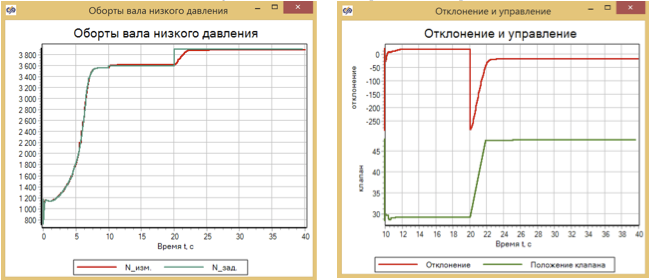
Рисунок 19. Обороты и управления для нечеткой логики
Регулятор на нечеткой логике справился отлично. Обратите внимание, что по положению задвижки у нас «сами собой» образовались ступеньки, когда клапан останавливался, выдерживал паузу и потом снова двигался.
Судя по графику 19, нечеткая логика гораздо лучше справилась с увеличением оборотов авиационного двигателя!
Теперь изменим условия задачи, настроенные на положительную ступеньку 300 об/мин, и испытаем отрицательной ступенькой -1500 об/мин. (Если взять больше, то клапан может закрыться, а как поведет себя модель при нулевом расходе топлива, я не знаю, хотя реальный двигатель допускает кратковременное прекращение подачи топлива.)
На 20 секунде расчета частоту зададим равную 2100 об/мин. И посмотрим, как отработают наши регуляторы. Первый на ринге – Fuzzy Logic.
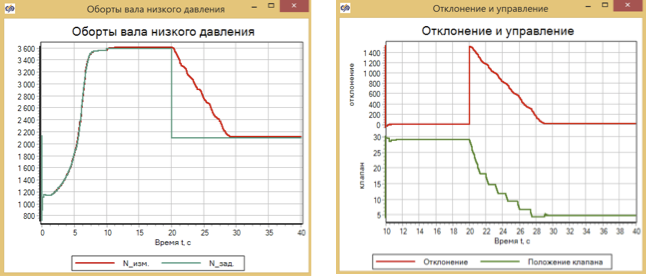
Рисунок 20. Отработка снижения оборотов. Нечеткая логика
Второй эксперимент — с ПИД регулятором. И что мы видим? Это полный провал, регулятор ПИД, настроенный на повышение частоты оборотов, не справился с понижением частоты. (см. 21) Что-то мне тревожно стало сейчас за наши АЭС.
Модель двигателя при низких оборотах оказалась абсолютно не управляемой с помощью ПИД регулятора, настроенного на управление на высоких оборотах.
Кстати видно, что кратковременное отключение подачи топлива (клапан закрывается полностью) не приводит к развалу модели турбореактивного двигателя.
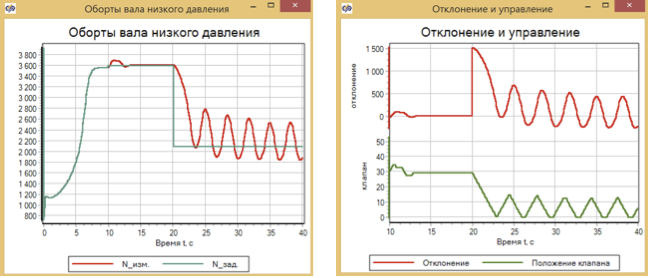
Рисунок 21. Отработка снижения оборотов. ПИД регулятор.
Напрашивается проверка с ПДД регулятором, в котором используется вторая производная. Поскольку такая модель уже сделана к предыдущей статье (см. рис. 22), то превратить нечеткую логику в ПДД – это дело двух секунд. (см. рис. 23).
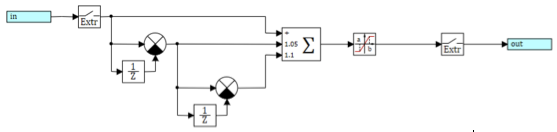
Рисунок 22. Структурная схема ПДД регулятора.

Рисунок 23. Замена ПИД на ПДД в алгоритме управления
Проводим настройку регулятора методом оптимизации и повторяем снижение оборотов.
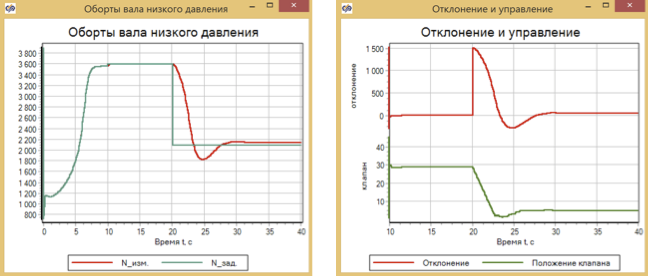
Рисунок 24 Отработка снижения оборотов ПДД регулятор
ПДД отработал с перерегулированием, но явно лучше чем ПИД, и практически так же хорошо, как и нечеткая логика. Но есть перерегулирование!
Усложним задачу — добавим шума в датчик
Попробуем теперь добавить белый шум к датчику измерения сигналов и посмотреть, как ведут себя регуляторы с реальным датчиком. Зона нечувствительности у нас 1% от максимальных оборотов – это 40 об/мин. Зададим белый шум равным 50 об/мин.
Поскольку ПИД не работает на снижении оборотов, тестировать будем на повышении.
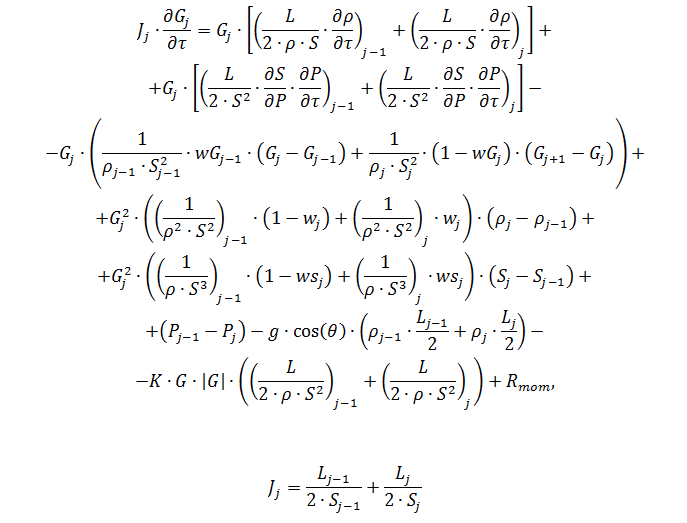
Регулятор ПДД с такими шумами явно не справляется, хоть и поддерживает требуемые обороты, но управляющий клапан трясется, как в пляске святого Вита, когда заданные обороты стоят. На рисунке 25 специально увеличен участок 25 – 26 секунда процесса

Рисунок 25 Повышение оборотов с шумами в датчике. ПДД регулятор
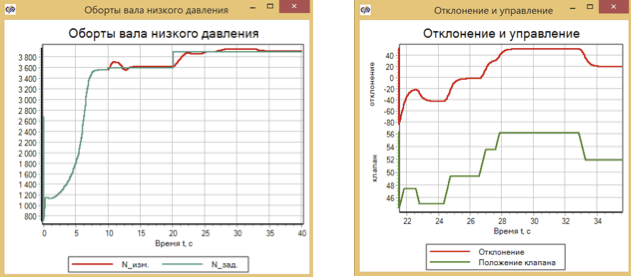
Рисунок 26 Повышение оборотов с шумами в датчике. ПИД регулятор
Переходной процесс для ПИД регулятора не изменился несмотря на шум в датчике оборотов. Управление идет с понятными и длительными ступеньками.
Тревога за АЭС отступила.
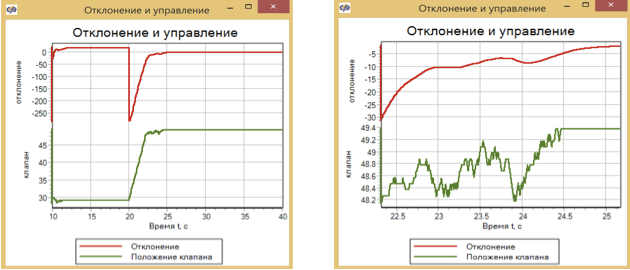
Рисунок 27. Нечеткий регулятор с шумами в датчике.
Регулятор с нечеткой логикой с шумами так же управляет, но в моменты приложения к стационарному состоянию возникают колебания положения органа регулирования.
Выводы
Третья серия испытаний нечеткой логики против ПИД и ПДД закончилась победой нечеткой логики. В отличие от простой модели предыдущей статьи.
Управлять ПИД регулятором на низких оборотах оказалось невозможно.
Выявленное экспериментально преимущество ПИД – это отсутствие колебаний при зашумленном датчике.
Кстати, динамика двигателя (график разгона) оказалась очень похожей на динамику упрощенной модели.
Архив с моделями для самостоятельного изучения можно взять здесь
Комментарии (42)

RouR
20.11.2018 11:43Это полный провал, регулятор ПИД, настроенный на повышение частоты оборотов, не справился с понижением частоты.
Один из шагов настройки ПИД регулятора — это проверка по критериям устойчивости. Это математика. У вас регулятор настроен методом перебора параметров.
petuhoff Автор
20.11.2018 11:46Да перебор параметров блоком оптимизации по критерию минимизации среднеквадратичного отклонения.
Но и нечеткая логика настроена таким же методом.
RRRoma
20.11.2018 15:31Настройка перебором не даст оптимального результата, попробуйте настроить ПИД-регулятор, например в Simulink
petuhoff Автор
20.11.2018 15:37-1Это не простой перебор. Выдержка из описания алгоритма оптимизации:
"… Реализуется алгоритм квадратичной интерполяции при одном оптимизируемом параметре (n = 1) и алгоритм преобразований вращения и растяжения-сжатия (n > 1).
Рассмотрим алгоритм при n > 1. Он основан на выполнении преобразований растяжения — сжатия и преобразований вращения для такого преобразования системы координат, при котором матрица вторых производных (матрица Гессе) приближается к единичной, а направления поиска становятся сопряженными. Этот алгоритм использует квадратичную интерполяцию…
Пусть H — симметричная положительно-определенная матрица. Будем строить последовательность матриц..."
Подробнее здесь...
petuhoff Автор
20.11.2018 15:46А если в симулинк собрать такую модель из 2000 блоков он наверное и не заведется.
Arastas
20.11.2018 18:20Смело. С чего бы это?
petuhoff Автор
20.11.2018 20:35Да хотя бы с того, что течение жидкости в трубе у учетом всех использованных уравнений в данной модели, нельзя повторить средствами Simulink
(для примера использование в модели уравнение сохранения импульса выглядит так:
 "
"
Подробнее здесь...
А сам Симулинк плохо переносит увеличение количества блоков в модели за 500Arastas
20.11.2018 21:06+1Симулинк отлично умеет подключать внешние библиотеки, хоть на фортране, хоть на Си, хоть собственно скомпилированные. Это ответ и на моделирование физики, и на количество блоков.
petuhoff Автор
20.11.2018 21:21Все верно, только вопрос времени и наглядности. В этом случае пришлось бы прикручивать чужой код на Фортране (двигатель) чужой код на Паскале (Гидравликa) алгоритмы в SimInTech к Simulink. Задача небольшого проекта месяцев так на 2-5. Зачем? Что бы оптимизировать? Так проще специализированные оптимизаторы прицепить к модели общей SimInTech.
Arastas
20.11.2018 21:33+1А сам Симулинк плохо переносит увеличение количества блоков в модели за 500
Вы поясните, а о чем речь? Если вы говорите о моделировании, то слабо верится, так как симулинк при инициализации моедли её "компилирует", и после этой стадии дальнейшие процессы на количество блоков не завязаны.
Видимо, вы говорите о написанном на Java кросс-платформенном графическом интерфейсе. Я сейчас быстро сделал модель с 3000 блоков (вложенных), у меня все отлично работает. Может, вы 500 элементов на один лист накидали?
Если вы продвигаете свою альтернтивную разработку, то может лучше делать это за счет её преимуществ, а не поиска недостатков у лидера рынка?
petuhoff Автор
20.11.2018 23:40К этой «компиляции» у Simulinк много вопросов. Например вот в этом примере явно плохо отрабатывает алгоритм сортировки блоков, хотя пример совсем не сложный и на первый взгляд не имеет проблем.
видео сравнения
petuhoff Автор
20.11.2018 23:46Ну про «лидера рынка», так это вобще не аргумент. Лидером рынка питания является картошка фри в макдаке и кока-кола. Так что не все лидеры рынка одинаковы полезны для здоровья.
petuhoff Автор
20.11.2018 23:53А можно теперь из 3000 блоков сделать в Simulink 300 000? Заработает?
В SimInTech работает картинка с модель где почти пол миллиона блоков.
 "
"
Vanellope
20.11.2018 15:15А можно картинки в более высоком разрешении выложить?
petuhoff Автор
20.11.2018 16:17можно но делались они на маке с ретиной и поэтому огромные. Скачать можно здесь...
Vanellope
20.11.2018 18:26+1Просто на картинках в статье ничего не разобрать. В частности ПИД-регулятор интересен, отклик на сброс уставки очень напоминает integral windup, как это по русски, интегральное насыщение? В регуляторе на этот случай что предусмотрено?
petuhoff Автор
20.11.2018 20:46Всякие сбросы задержки у ухищрения конечно есть, но скорее всего дело в том, что при снижении оборотов работать приходится при почти закрытом клапане и там малое перемещение вызывает большое изменение расхода в гидравлической системе и идет раскачивание. (это версия)

FGV
20.11.2018 16:19+1Зона нечувствительности у нас 1% от максимальных оборотов – это 40 об/мин. Зададим белый шум равным 50 об/мин.
Можно еще подмешать осцилирующий сигнал с амплитудой = двойной зоне нечувствительности. Тогда ПИД будет стремиться отрабатывать управление с нулевой ошибкой, а не как сейчас зависать на 1%.
Управлять ПИД регулятором на низких оборотах оказалось невозможно.
Не совсем корректный вывод. Объекты разные, и коэффициенты ПИД регулятора надо подбирать либо под наихудший объект, либо делать переменными и варьировать от параметров.petuhoff Автор
20.11.2018 16:21Согласен, управлять с настройками полученными на высоких оборотах, на низкимх оборотах оказалось не возможно.
wergjg
20.11.2018 19:38+1В качестве модели мы зададим трубу диаметром 10 мм, на которую поставим электрический
клапан. Давление на одной стороне трубы задаём постоянным, считая что там работает топливный насос
В тех системах, которую я знаю, электрического крана нет. Давление создается плунжерным насосом, который вращается от вала турбины. Сам насос может менять свою производительность в зависимости от управляющего давления. При команде уменьшения оборотов, управляющее топливо в течении 2-10 секунд сливается через специальный дроссель, это плавно уменьшает производительность насоса и уменьшает скорость вращения турбины. То есть если на полных оборотах вдруг произойдет обрыв управляющих шлангов, то насос всё равно будет поддерживать минимальный расход топлива. И это не даст пламени форсунок погаснуть. Когда резко дается полный газ, система Командно-топливного агрегата плавно поднимает давление в управляющих шлангах и в течении 30-60 секунд насос выходит на максимальную производительность. Это надо что бы не было помпажа. В управлении нет не одной электрической детали. Всё управление через гидравлику, все переменные связанные со скоростью изменения режима калиброванные дросселя (подбираются при настройке системы). Всё это касается турбин 2 и 3 поколения. Так как создавалось в 70 — 90 годы и ардуины не было даже у китайцев.petuhoff Автор
20.11.2018 20:51Поэтому и называется текст. Скрестить ежа и ужа. Подсунуть незнакомую модель методам управления и посмотреть что получится. И сейчас скорее всего авиационные двигатели управляются так же. Но вот когда на их базе делают наземные возможно применения и электрических клапанов (наверное)
sim2q
20.11.2018 20:10+1
А что за софт? Интересно, есть такой GNU для простых смертных?
Рисоватьв Ардуиноумный дом (извините) для контроллера на сервере, а на местах МК лишь как интерфейс к датчикам, исполнительным устройствам и линии связи.
 "
"
A1ien
20.11.2018 22:23+1На самом деле ПИД регулятор — это обобщенный регуляро который удовлетворяет потребностям 80% систем. Он выводится из теории автоматического регулирования как обощение. Для сложных систем применяются регуляторы, которые расчитываются конкретно для заданной системы. Исхотя из передаточной и импульсной характеристики системы. Задача не простая. Я уже забыл как это делается. Но мы это учили:) И делали системы автоматичесеого наведения ракет на цель по лучу слежения, исходя из хараактеристик цели — скорость, угловая скорость итд… Короче задача решена не оптимально.
petuhoff Автор
20.11.2018 23:55Да скорее всего нужно менять подачу топлива, при низких оборотах клапан почти закрыт и любое изменени его положение менят расход в разы. Но нечеткий регулятор почему то справился.
wikipro
21.11.2018 11:53Внесу свои 2 копеек:
- На АЭС и ТЭС от использования гидравлической и электро гидравлической системы регулирования Турбин сейчас отказались, заменили на полностью электрическую с ЧРП (на аэс называется "САРЗ — Система Автоматики Регулирования и Защит").
teecat
Эк молодость. Помню народ изучал системы управления МиГ-21. компьютеров в нем не было и все на гидравлике. По причине отсутствия компьютеров видимо как-то сомнений таких не испытывали (смайлик)
Хорошие такие талмуды были