
Учебные материалы для школы программирования. Часть 14
Предыдущие уроки можно найти здесь:
Сегодня мы настроены на отдых и развлечения! Поэтому, этот урок будет простой и "короткий". Мы не будем работать с графикой (но вас никто не ограничивает в праве усовершенствовать проект), уделим внимание управлению и работе с физикои?, на примере создания судна на воздушнои? подушке.

Порядок выполнения
Создадим новыи? проект, импортируем в него приложенныи? ассет. В данном ассете содержится модели, звук и простая сцена.
Первое, что нам необходимо сделать - это установить на сцену модели карты и СВП, затем создать материал с нулевым трением и назначить его юбке СВП
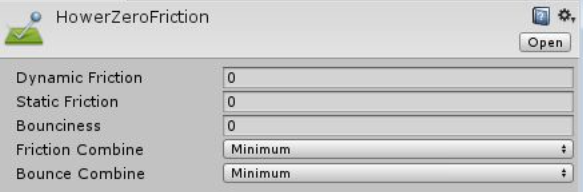
На само судно устанавливаем Rigidbody со следующими параметрами:


Обратите внимание, что на коллаи?дерах установлена галочка Convex, а Rigidbody не имеет галочку использования гравитации. Вместо нее? используется ConstantForce с довольно большим значением, направленная вниз.
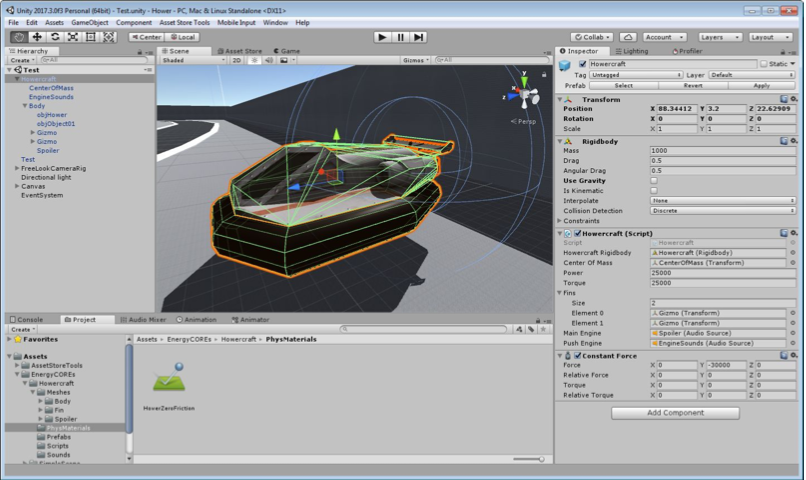

Как видите, на скриншоте уже наложен скрипт. Но до того, как приступать к нему, необходимо установить рулевые лопатки.
Также, на модель в точках установки рулевых лопаток, установлены пустые геи?м-обджекты с названием Gizmo, в них и уложены сами лопатки.

Скрипт конфигурируется согласно позапрошлому скриншоту. Полныи? листинг скрипта выглядит таким образом:
using UnityEngine;
using System.Collections;
public class Howercraft: MonoBehaviour {
public Rigidbody HowercraftRigidbody; // риджитбади
public Transform CenterOfMass; // центр масс
public float power = 25000; // мощность вперёд/назад
public float torque = 25000; // мощность влево/вправо
float finAngle; // угол отклонения лопаток
float pitch; // питч для звука
public Transform[] Fins; // массив с лопатками
public AudioSource mainEngine; // звук основного двигателя
public AudioSource pushEngine; // звук турбин
// Use this for initialization
void Start() {
HowercraftRigidbody.centerOfMass = CenterOfMass.position - HowercraftRigidbody.position; // устанавливаем центр масс
}
// Update is called once per frame
void Update() {
float inpFB = Input.GetAxis("Vertical"); // ввод вперёд/назад
float inpLR = Input.GetAxis("Horizontal"); // и влево/вправо
Vector3 vely = new Vector3(HowercraftRigidbody.transform.forward.x, 0, HowercraftRigidbody.transform.for ward.z); // находим вектор приложения силы
float gain = Mathf.Clamp01(HowercraftRigidbody.transform.up.y); // если перевёрнуты, силы будут равны нулю
HowercraftRigidbody.AddForce(vely * power * inpFB * gain, ForceMode.Force); // добавляем линейные силы
HowercraftRigidbody.AddRelativeTorque(0, torque * inpLR * inpFB * gain, 0, ForceMode.Force); // и поворот
finAngle = Mathf.Lerp(finAngle, -45 * inpLR, Time.deltaTime / 0.2f); // угол лопаток
foreach(Transform Fin in Fins) {
Fin.localEulerAngles = new Vector3(0, finAngle, 0); // выставляем угол
}
mainEngine.pitch = 0.9f + HowercraftRigidbody.velocity.magnitude / 60f; //высота звука основного двигателя
pitch = Mathf.Lerp(pitch, Mathf.Abs(inpFB) * 1.3f, Time.deltaTime / 0.5f); // высчитываем высоту звука турбины
pushEngine.pitch = 1f + 2f * pitch;
pushEngine.volume = 0.3f + pitch / 3f;
}
}
При этом скрипт лучше давать последовательно, сначала физическии? движок, потом звуковои?.
Готово!
v1000
Дизайн СВП довольно забавный. Снаружи выглядит неплохо, но вид из кабины будет немного странный.