

Квадрокоптеры неожиданно ворвались в нашу жизнь и распространились повсеместно. Они получили свой второй шанс на жизнь, впервые появившись в первой половине прошлого века. Однако их основная проблема так до сих пор и не решена, — над чем и бьются множество компаний и отдельных энтузиастов.
Мультикоптер (англ. Multirotor, multicopter, многороторный вертолёт, многолёт) — летательный аппарат, построенный по вертолётной схеме, с тремя и более несущими винтами
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров (англ. quadcopter, четырёхроторный вертолёт), который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году.

Источник картинки: wikipedia.org
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании, также удобны для недорогой аэрофото- и киносъёмки.
В последнее время появились миниатюрные квадрокоптеры, умещающиеся на ладони (Walkera Ladybird, WLtoys V929, Blue Arrow nano Loop и пр). Они практически безопасны (масса аппарата менее 100 г), в то же время позволяют получить основные навыки полёта на мультироторном аппарате, так как принцип их управления ничем не отличается. Квадрокоптеры такого размера возможно запускать дома, не рискуя нанести вред людям или предметам. Некоторые модели разгоняются до впечатляющих 26 м/с[13], имеют высокое качество съёмки и управляются на расстоянии более 3,5 км.
По принципу управления мультикоптеры существуют:
- автономные
- дистанционно-управляемые (беспилотные)
Мультикоптеры имеют 3 или более винтов постоянного шага (автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина — против, поэтому рулевой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
- ускорить все винты — подъём;
- ускорить винты с одной стороны и замедлить с другой, что приведет к наклону, после чего — выровнять скорости и продолжить движение в сторону, в таком наклоненном положении;
- ускорить винты, вращающиеся по часовой стрелке, и замедлить вращающиеся против — поворот в плоскости.
Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облёта препятствий. Использование GPS-приёмника позволят записывать маршрут полёта заранее, с компьютера а также возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала, или снимать параметры полёта оперативно или потом.
Винты могут быть установлены непосредственно на вал двигателя, либо через редуктор.
В любительских и профессиональных мультикоптерах используются коллекторные и бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии. Это накладывает определённые ограничения на полётные характеристики: типичная масса мультикоптера составляет от 1 до 4 кг, при времени полёта от 10 до 30 минут (30—50 минут у уникальных единичных экземпляров). Запас энергии батарей позволяет отдельным моделям мультикоптеров улетать на расстояние до 7—12 км, на практике же радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку взлёта) обычно ограничено прямой видимостью (100—200 м при ручном управлении) либо дальностью действия аппаратуры радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и систему направленных антенн, способны обеспечивать стабильные: радиоуправление и видеолинк на расстояния до 100 км. Таким образом, наибольшее ограничение на радиус действия мультикоптеров накладывает именно время полёта.
Эти ограничения приводят к тому, что мультикоптеры обычно используются как аппараты «ближнего радиуса действия»: для любительских полётов недалеко от себя, для фото-видеосъёмки близко расположенных объектов и так далее (для сравнения, беспилотные самолёты с аккумулятором аналогичной ёмкости могут улетать на 10—15 км при высоте полёта 1—2 км).
Поднимаемый полезный груз моделями мультикоптеров среднего размера и грузоподъёмности — от 500 г до 2—3 кг, что позволяет поднять в воздух небольшую фото- или видеокамеру (обычно экшн-камера в более дешёвых моделях, либо зеркальные камеры в профессиональных).
Существуют и достаточно крупные модели мультикоптеров, с количеством роторов порядка 6—8 (гекса- и октокоптеры), способные поднять в воздух груз массой до 20—30 кг. Для увеличения грузоподъёмности применяют соосное расположение несущих роторов, что в случае гексакоптера, например, даёт 12 моторов и 12 пропеллеров, расположенных попарно на 6 несущих лучах.
Скорость полёта мультикоптера может быть от нуля (неподвижное висение в точке) до 100—110 км/ч.
Существуют также трёх- и пятивинтовые вертолёты (три- и пентакоптеры). Один из моторов там располагается на нанизанной на ось подвижной платформе, угол поворота которой изменяется сервоприводом — так и осуществляется поворот аппарата вокруг своей оси. Отдельно стоит отметить экспериментальные аппараты: бикоптеры, квадрокоптеры с изменяемым шагом пропеллеров, квадрокоптеры с двигателями на импеллерах, однако они не получили какого-либо распространения.
Большое количество энтузиастов занимается самостоятельной сборкой коптеров.
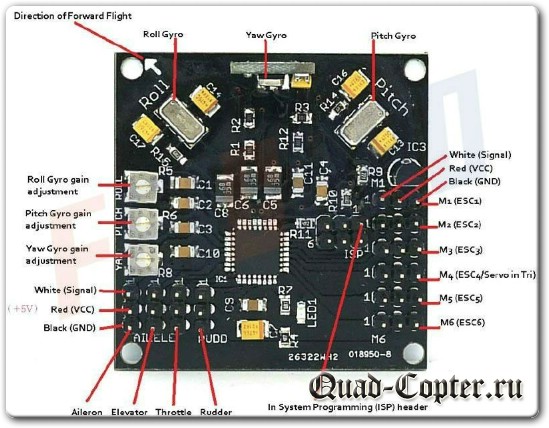
Часто для этих целей они используются широко известный недорогой полётный контроллер KK Multicopter, который имеет несмотря на свою низкую цену, достаточно широкие возможности и позволяет управлять системой, содержащий до 6 роторов включительно.
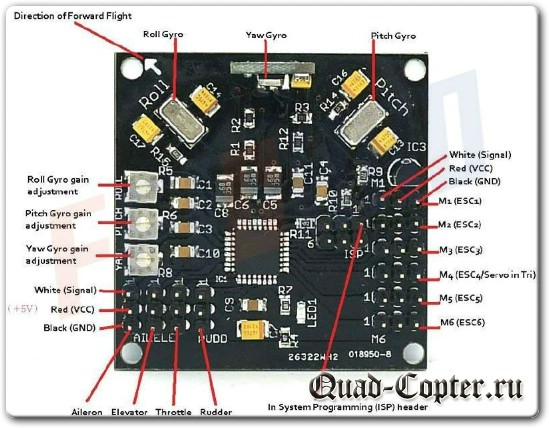
Источник картинки: www.quad-copter.ru
Следует упомянуть, что большая часть современных мультироторных систем представляет собой электрические машины, где тяговыми двигателями выступают электродвигатели, а в качестве источника энергии для них используются, в основном, литий-полимерные аккумуляторные батареи.
Исходя из всего вышесказанного, проистекает основная проблема мультироторных электрических систем: малое время работы (ввиду гораздо меньшего соотношения ёмкости аккумуляторных батарей к их весу, то есть энергоёмкости, по сравнению с любыми топливными системами) и невозможность подзарядки аккумуляторов в полевых условиях, ввиду отсутствия такой возможности.
Кроме того, грузоподъёмность мультироторных систем оставляет желать лучшего. Они вполне годятся для перевозки небольших грузов, однако стоимость системы, которая сможет стать полноценным средством передвижения или перевозки пассажиров, будет достаточно внушительной. Справедливости ради, однако, следует отметить, что в последнее время начинают практически реализовываться идеи некоего летающего городского такси, которое как раз будет построено на основе мультироторной электрической системы.
Однако, как уже было сказано ранее, мультироторные системы появились не вчера, изначально они представляли собой исключительно системы на двигателях внутреннего сгорания.
И не так давно, в середине 2010-х годов появилось достаточно интересная система, которая «возвращалась к истокам» и представляла собой квадрокоптер бензинового типа — Nitro Stingray.
В отличие от своих электрических собратьев, эта система в своей основе имела в качестве силовой установки двигатель внутреннего сгорания, от которого крутящий момент передавался на все четыре несущих ротора:
Этот квадрокоптер отличался тем, что он имел один центральный двигатель, а присущая мультикоптерам подвижность,- обеспечивалась четырьмя винтами, с изменяемым шагом:
Ввиду высокой энергоёмкости сжигаемого топлива, этот квадрокоптер имел относительно небольшой вес, если сравнивать его с электрическими собратьями, высокую удельную грузоподъёмность, а также подвижность, о чём было сказано ранее.
В это же десятилетие отметились несколько известных проектов, которые пытались решить проблему недостаточной грузоподъёмности электрических устройств таким же путем, — использованием центрального двигателя и передачи крутящего момента, в то время как управление осуществлялось регулировкой шага винтов.
Одним из таких проектов является проект Incredible HLQ (Heavy Lift Quadcopter), который даже запускал свою кампанию на kickstarter com.
Вот что говорили о нём его создатели:
«Мы — группа студентов-механиков, работающих над нашим главным проектом в Государственном университете Сан-Хосе в Сан-Хосе, Калифорния. В состав группы входят 4 участника: Ник Коновер, Крис Фулмер, Карлос Герреро и Габриэль Теллез. Каждый из нас обладает особым набором навыков и специализируется в 2 различных дисциплинах: мехатроника и конструирование.У проекта есть свой канал на YouTube, где они публикуют последние новости о разработках.
Мы проектируем и строим квадрокоптер с большой грузоподъёмностью (HLQ), который мы называем Incredible HLQ (звучит как «Халк»). Как и супергерой, HLQ сможет поднимать и транспортировать огромное количество веса для своего размера и стоимости. HLQ сможет автономно извлекать и доставлять 50 фунтов (~22,7 кг) полезной нагрузки.
Чтобы достичь цели в 50 фунтов, HLQ будет использовать трансмиссию, приводимую в действие двумя бензиновыми двухтактными двигателями мощностью около 12,5 л.с. каждый. Подъём будет осуществляться с помощью четырёх головок несущего винта коммерческого радиоуправляемого вертолёта с четырьмя лопастями диаметром 435 мм. Выбор этих лопастей был основан на реальных испытаниях подъёмной силы на нашем испытательном стенде, которые показаны в видео. Управление достигается за счёт использования управления переменным шагом винтов для изменения подъёмной силы каждого ротора.
Управление полётом будет использовать модуль DIYDrone Ardupilot APM2.5 +. Ardupilot — это плата управления на базе Arduino с открытым исходным кодом для БПЛА. Он широко используется для многих летательных аппаратов с неподвижным крылом, вертолётов и многороторных летательных аппаратов и имеет подтверждённый послужной список.
Кроме того, мы будем использовать систему компьютерного зрения для идентификации и отслеживания полезной нагрузки с помощью библиотеки OpenCV на Roboard RB-110. RB-110 — это полноценный компьютер на одной плате. Он имеет 486-совместимый процессор с тактовой частотой 1 ГГц и может работать под Windows, Linux или Dos.
HLQ — дорогостоящий проект для большинства старших инженерных проектов в SJSU (Государственный университет Сан-Хосе). Затраты выходят за рамки того, что мы, студенты, можем себе позволить, и поэтому ваша поддержка имеет решающее значение для нашего успеха».
Несмотря на большое количество затраченного времени, в данный момент проект всё также находится в стадии разработки, последнее видео о новостях проекта вышло в мае 2020 года:
Ещё одним достаточно известным проектом является Goliath Mkll.
Проект стартовал примерно в то же время, что и первый, также в 2014 году и имеет свой канал на YouTube, но так же как и первый проект, — до сих пор находится в стадии разработки:
Достаточно долгое время идея бензиновых грузоподъёмных мультироторных систем пребывала в запустении, в течение всего десятилетия 2010-х. По крайней мере, не было ничего особо заметного, что бы громко заявило о себе в блогосфере или интернете в целом.
Однако, в последние 3-4 года, ситуация похоже сдвинулась с мёртвой точки, — разработчики похоже учли сложность создания системы с изменяемым шагом винтов, и пошли другим путём: один за другим стали появляться проекты, которые сочетают в себе преимущества двух подходов,- электрического и бензинового.
Как правило, эти проекты построены приблизительно по одной и той же схеме: классическая мультироторная система, где несущие роторы базируются на основе электрических двигателей, в то время как источником энергии для питания системы являются не аккумуляторы, а используется портативная бортовая электростанция внутреннего сгорания — для выработки электроэнергии.
Такого типа дроны позиционируются как средства для опыления полей от вредителей. Ввиду своей грузоподъёмности и большого времени работы, они могут брать на борт большой бак с жидкими инсектицидами и работать долгие часы, проходя большую площадь.
Хотя, кое-кто развивает и альтернативные технологии. Как, например, проект ниже, о котором, к сожалению, ничего не известно, кроме технических характеристик, показанных в видео. Мультикоптерная система, предположительно, имеет синхронизирующие валы между парами отдельных двигателей, для выравнивания их скоростей, проходящие внутри труб — каркаса. А управление осуществляется наклоном каждого конкретного двигателя:
В качестве заключения: Некоторое время назад, вышло видео, где сноубордист, прицепленный к квадрокоптеру, катается на фоне заснеженных ландшафтов:
Неожиданный подход, продемонстрированный в видео, произвёл впечатление на многих и широко разошёлся по блогосфере. Однако любой, более-менее близко знакомый с технической стороной «коптеростроения», понимает, что построение подобного коптера, — обойдётся в круглую сумму!
Но благодаря продемонстрированному строителями сельскохозяйственных коптеров подходу, данная затея уже не кажется такой безумной!
Предположим некий мультикоптер, который может поднимать человека, построенный по электрической схеме, и питающийся от бортовой электростанции. Ввиду мультироторной схемы, такой коптер будет обладать высокой подвижностью, в то же время, обладая высокой грузоподъёмностью, что позволит использовать его для такого интересного применения как дрон-бординг (катание за дроном, на прицепе)! Или скажем, в качестве манёвренного мощного дрона, для доставки грузов.
Для снижения шума от работы двигателя бортовой электростанции, дрон может лететь на большой высоте, поэтому это не будет проблемой.
Стартап? Why not…

Комментарии (48)

Ad_Infinitum
04.11.2021 12:26+3После просмотра последнего видео, родителям будет легче объяснить современным детям как Санта так ловко передвигается по крышам. По сравнению с оленями эта версия будет правдоподобней ????



Barabas79
04.11.2021 18:13Странно, почему не используется схема ДВС -> эл. генератор -> силовые моторы?

DAN_SEA Автор
04.11.2021 18:43+2Нет, используется ;-) В последних опрыскивателях от китайцев - там как раз ДВС+генератор (можно увидеть, что никаких механических передач к движкам не идет, как в Nitro Stingray - здесь чистые электрические движки):
Barabas79
04.11.2021 18:52Видел эти превью, но думал, что внутри этих держателей находятся валы для передачи крутящего момента)

vasimv
05.11.2021 02:40Эффективность значительно ниже, чем прямой привод ДВС->винт, а вес генератора - довольно большой получается. Для решения последней проблемы - какой-нибудь линейный ДВС генератор подошел бы больше, но пока их доступность небольшая.

Javian
05.11.2021 19:15+1У бензиновых узкий диапазон рабочих частот. Собственно это все видят на тахометре авто. Ниже 900 об/мин может заглохнуть, выше 2000 об/мин сильный износ.

ktod
04.11.2021 18:42+2А никто не пробовал совместить два типа двигателей по схеме: центральный несущий винт с приводом от ДВС (простая механика, без автомата перекоса и изменения шага, возможно два винта) и четыре электрических винта на консолях? Основную энергию "висения" обеспечивает центральный "силовой" винт, консольные винты для управления аппаратом.
DAN_SEA Автор
04.11.2021 18:53+1Слышал про такую схему, но почему то не делают. Сложно сказать почему...Скорее всего, просто тему бензиновых мультикоптеров мало кто двигает. А те, кто делает - предпочитают или "реально заморочиться" с переменным шагом или сразу сделать результат, из условно простых, проработанных блоков.
Но, кстати говоря, есть один весьма знаменательный дрон, который вполне можно сделать по бензиновой схеме вертолета и даже без электрических движков. Это вот такой шар от японцев (позиционируют, как дрон для их службы МЧС).
Вкратце - в центре единственный винт. Полеты в стороны осуществляются 4 направляющими лопастями внизу, отклоняющими поток воздуха. Поворот вокруг оси -точно так же:

DAN_SEA Автор
04.11.2021 19:06Кстати говоря, теоретически, если сделать этот дрон условно большим шаром, закрыть сеткой металлической, внутри мощный двс, винт - около 1 метра диаметром, карбоновый (находил даже такой в продаже, был что то около 300$, - то теоретически, можно к нему прицепиться и устроить "полный дрон-бординг" :-)
Barabas79
04.11.2021 18:53Там наверное проблема в том, что чтобы компенсировать неравномерности тяги от центрального винта нужны мощности примерно такого же порядка
ktod
04.11.2021 19:46+1Тут, скорее, момент от центрального винта может стать проблемой, да. Решение, или два соосных винта или как у Чинука. Т.е. схема получается не сильно то и простой. Но, все равно, проще чем изменяемый шаг или перекос.
vasimv
05.11.2021 02:43+1Крутящий момент от центрального винта вообще не проблема. На ютубе видел ролик, где центральный ДВС мотор был с четырьмя стабилизирующими движками, которые были закреплены с небольшим наклоном, как раз чтобы его компенсировать. Я сам делал хвостовой винт, как на вертолете - дешево и сердито, мотор по мощности нужен очень небольшой.
igsend
10.11.2021 23:26в обычных условиях разворачивающий момент не постоянен - во время набора высоты, висения и спуска он сильно разный. А отсутствие лишних подвижных вещей (будь то аппарат перекоса, наклона винта или изменемый шаг) - как раз большой плюс коптеров
vasimv
04.11.2021 19:47+1Нет, не нужны там высокие мощности, сам возился с подобными схемами на чисто электрических коптерах. Правило рычага же - лучи для стабилизирующих просто нужно делать достаточно длинными. Для примера, мой летал с центральным движком с тягой где-то в килограмм и тремя стабилизирующими по 200 грамм тяги. Там единственная проблема - контроллер будет находиться рядом с бензиновым движком, который вибрирует гораздо сильнее электрического. Ну и батареи нужно с собой все равно таскать довольно емкие.
vasimv
04.11.2021 19:43+1Делали уже, на ютубе ролики есть. Просто не особо интересно народу это, очевидно. Я сам хотел такой сделать, но дошел только до тестов чисто электрического коптера с центральным мощным движком и тремя маленькими стабилизирующими, плюс один хвостовой для yaw-стабилизации (как у вертолетов, проще конструкция получилась). Летало, но заменить тяговый мотор на бензиновый руки не дошли.
DAN_SEA Автор
04.11.2021 22:06Было бы очень интересно глянуть! Я в свое время не нашел таковых (вероятно, они появились позже). В любом случае - если можете сюда выложить, будет здорово! ;-)

lolhunter
05.11.2021 01:21Надо тогда делать два винта. Или соосных со сложной механикой а-ля Ка-52 или по обычной вертолетной схеме. Иначе все это дело будет вращаться.

Gutt
09.11.2021 18:20А зачем сложная механика или автомат перекоса? Если нужно тупо скомпенсировать момент, то ставим бензиновый двигатель в центре, а над ним и под ним по винту. Привод через коническую зубчатую передачу (да, диаметр приводного зубчатого колеса получится большим, не меньше высоты двигателя, но это как раз позволит увеличить частоту вращения винтов). Разнонаправленность вращения получается автоматически. Придётся компенсировать дисбаланс из-за смещения двигателя относительно центра. Первое, что приходит в голову -- ездящий по направляющей топливный бак. Но, думаю, батареи для управляющих двигателей будет проще для этого использовать.
lolhunter
09.11.2021 18:36То есть у вас снизу и сверху по винту? Вращающихся в разные стороны?
По центру движок.
А полезная нагрузка где?
Ведь по бокам по условиям еще и моторы, которые типа управляющие.
Стоит еще не забыть, что из-за такой конструкции у вас увеличиваются в длину и по весу ноги, на которых это все стоит (что бы винт по земле не терся), а с учетом того, что на этих ногах бензиновый движок, редуктора, винты и прочее - они уже начинают весить, скажем так, не мало.Gutt
09.11.2021 18:51Но мы же говорим о грузоподъёмном мультикоптере с бензиновым двигателем, где плюс-минус пять кило на раму погоды не делают. Полезная нагрузка под винтами, ноги высокие.
Идея "давайте сделаем несущий винт и управление пропеллерами на электродвигателях" уже сама по себе упрощение механики в ущерб весу: автомат перекоса и управление по-вертолётному будет всяко легче. А тут мы ещё сильнее всё упрощаем, избавляясь от сложной механики совсем ценой утяжеления рамы.lolhunter
09.11.2021 19:26Полезная нагрузка под винтами.
Получается у нас винты, коптер и движок "наверху", дальше нагрузка, дальше ноги которые все это держат.
Я не силен в аэродинамике, но мне кажется будут очень жесткие ограничения по габариту груза. Иначе под винтами воздушный поток будет долбить в груз. Ну и в целом конструкция, скажем так, не вселяет.Gutt
09.11.2021 19:48Возможно, придётся добавить дефлекторы. Вертолёты обычно возят груз или в фюзеляже, или на достаточно длинной подвеске. Но для любой схемы "большой несущий винт" придётся с этим заморачиваться. А размещение груза на уровне или над несущим винтом принесёт проблемы со стабильностью, которые здесь не решаются так же легко, как для настоящего мультикоптера.

YMA
05.11.2021 11:00+1Пожалуйста, получите и распишитесь ;) https://rg.ru/2021/10/28/v-iaponii-predstavlen-letaiushchij-motocikl-on-zhe-hoverbajk.html
Как сказано на сайте производителя, ховербайк оснащен двигателем внутреннего сгорания и четырьмя электродвигателями. Вес мотоцикла - 300 килограммов, длина - 3,7 метра, ширина - 2,4 метра, высота - 1,5 метра. Максимальная грузоподъемность - до 100 килограммов. Стоимость мотоцикла - 680 тысяч долларов.


gorbln
04.11.2021 23:42+5Примерно тогда, когда всё это начало появляться, а именно в 2012...2016 годах, всё это дело уже обсуждали, и вот к чему пришли.
1) Эффективность несущего винта тем больше, чем больше его диаметр.
2) Эффективность специально разработанных для коптеров винтов - в разы (буквально) выше, чем у винтов вертолётного типа с изменяемым шагом.
3) Исходя из вышесказанного - зачем городить огород из 4 балок с винтами с изменяемым шагом (что само по себе нетривиальная конструкция с кучей люфтов)? Чтобы их тягать - нужны сервы, которые должны быть быстрые, довольно мощные и лёгкие (а значит - ненадёжные). Чтобы всё это питать - нужна электроэнергия. То есть - аккумулятор таки нужен. Плюс силовая установка, которая весит тоже будь здоров. Самое лёгкое - это турбины, но там свои заморочки. А принимая во внимание пункт 1 - винты должны быть большими.
И зачем нужна эта гора люфтоватой ненадёжной механики??? Если хочется ДВС - есть проверенное временем решение - вертолёт. Обычный тупой вертолёт с ДВС. Там всё придумано 30 лет назад, и работает не хуже и сейчас. В вертолёте, конечно, механики тоже хоть отбавляй. Но не столько. Плюс, вертолёт при отказе основной силовой установки имеет ненулевой шанс мягкой посадки на авторотации (такое упражнение даже входит в учебный комплекс р\у вертолёта). Мультиротор же в таком случае превращается в кирпич. А отказ ДВС - в целом, обычное дело, в отличие от отказа электрической силовой установки. При всём прочем - эффективность вертолёта выше всех остальных коптеров, даже с учётом неэффективного винта. Просто потому, что винт один и большой.
Резюмируя. Пока что мультироторы - это электрические машины. И нет предпосылок, чтобы они стали бензиновыми. А если бензин - то это 1-2 винта и вертолётная схема.
lolhunter
05.11.2021 01:30+1Читаю статью и.. Все это я уже читал лет 6 назад в обосновании проекта квадрокоптера с гибридной силовой установкой с грузоподъёмностью 120 кило под грант.
Прям даже обороты те же самые.
Ну а по теме.. Там выигрыш в итоге копейки.
Если рассмотреть не энергоемкость бензина как топлива, а энергоемкость связки ДВС+генератор+баки+бензин+аккумуляторы на старт/аварийнкю посадку и как демпферы против моторы + аккумуляторы получится уже не такой огромный выигрыш.
И пестицидами в Китае давно обрабатывают поля с Дронов. Имея 4 современных аккумулятора на дрон можно обрабатывать 24/7.

SebastianP
05.11.2021 11:02Причем вертолет несравним по энергоэффективности с самолетом, а самолет с планером.
Такую цену нужно платить за высокую манёвренность и вертикальный взлет
lolhunter
05.11.2021 12:23Не только. За кратно проще систему управления, за кратно меньшие требования к инфраструктуре.
Для квадрокоптера или вертолета достаточно площадки +1м к габариту. Для самолета надо ВПП. Даже для БПЛА самолета надо ВПП метров 10-20. Где-нибудь в тайге на обследовании трубопроводов может не быть этих 20 метров очень долго.
САУ самолета БПЛА и САУ коптера это сильно разные задачи. Посадить самолет даже без ветра по GPS крайне сложно. Посадить коптер по GPS - вообще не сложная задача.gorbln
05.11.2021 19:14САУ - это полётный контроллер? В хоббийном сегменте он одинаковый у самолётов и коптеров. INAV, к примеру.
Сажают БПЛА самолёты обычно на парашюте. Ибо посадить на полосу в автоматическом режиме без радиоприводов и прочей взрослой аппаратуры - ну, это из разряда невозможного.
Коптер и вертолёты сильно проще запускать - это да.
lolhunter
05.11.2021 22:37САУ - это полётный контроллер? В хоббийном сегменте он одинаковый у самолётов и коптеров. INAV, к примеру.
САУ это Система автоматического управления. Полетный контроллер это про полет. САУ это про все. Взлет, посадка, полет, поддержание курса,
Сажают БПЛА самолёты обычно на парашюте. Ибо посадить на полосу в автоматическом режиме без радиоприводов и прочей взрослой аппаратуры - ну, это из разряда невозможного.
Если без учета ветра - в целом ничего особо не надо. Но вот когда появляется погода - все становится мягко говоря грустно. Потому что время реакции самолета на тот же порывистый ветер - грустненькое скажем так.
В этом кстати и проблема бензиновых дронов. Бензиновый мотор крайне неохотно набирает и сбрасывает обороты. Иными словами инерция по сравнению с бесколлекторным мотором - не сопоставима.
Paskin
06.11.2021 13:57Инерция является проблемой не только бензиновых дронов - но и самолетов вообще. Чем больше несущие поверхности - тем они эффективнее "несут" в стабильном режиме (дальность на галлон топлива у самолетов в разы выше), и тем хуже управляемость, особенно у земли.

dragonnur
11.11.2021 16:03По сравнению с инертностью газовой турбины поршни набирают и сбрасывают обороты "мгновенно".
fdeh75
05.11.2021 11:41По поводу схемы с генератором интереснее использовать силовую часть на турбине. Массо-габариты лучше чем у ДВС, но сильно дороже.
Также есть идея механического привода через муфты от двигателя на горючем топливе, но на винтах также стоят bldc. Моменты на двигателях контролируются рекуперацией/ускорением от аккума. Видел проект где момент на винте регулировался прямо по фазе вращения на blds в режиме похожем на управление шаговым двигателем, получается электронный аналог автомата перекоса.YMA
09.11.2021 21:10Тогда уж управляемые муфты на магнитной жидкости - и можно без электродвигателей обойтись.
fdeh75
11.11.2021 10:56Прикольно, не знал про такие. Но пока что не представляю себе какая там скорость реакции и затраты энергии на управление. Вариант с движками может сразу же работать как генератор перерабатывая дешевую мощность от ДВС в дорогую электрическую и обеспечивает скорость реакции достаточную для управления моментом вращения с дискретизацией менее 2Pi.

speakingfish
11.11.2021 16:19+1Стоит упомянуть, что автор Stingray 500, делал и такой, более тяжёлый прототип:
MantaRay Prototype 1230
ps. А вот я развлекаюсь сосхемой с переменным шагом винта
DAN_SEA Автор
11.11.2021 17:50Очень интересная информация! Спасибо!
А видео вашего аппарата нет случаем? ;-)

{kind=link}
{kind=link}
Radish
Безопасность на высоте