
ALARM: Будет много картинок.

Корпус будет немного отличаться от модели из первой части, так как модель является улучшенной версией собираемого корпуса.
Как упоминалось в первой части, в качестве материала будет использоваться фанера 3мм. Сделал заказ лазерной резки по чертежам из и спустя 2 дня модель из экрана перешла ко мне на стол, правда по частям.

Меня это не остановило и начался длительный процесс сборки, который занял приблизительно часа 3 — 4. Перед сборкой лучше сделать сортировку деталей, так намного удобнее собирать.

Сборка конечностей
for (uint32_t i = 0; i < 6; ++i) {
Звено 1
Начать я решил со сборки 1 звена конечности. Для этого потребуются следующие детали:
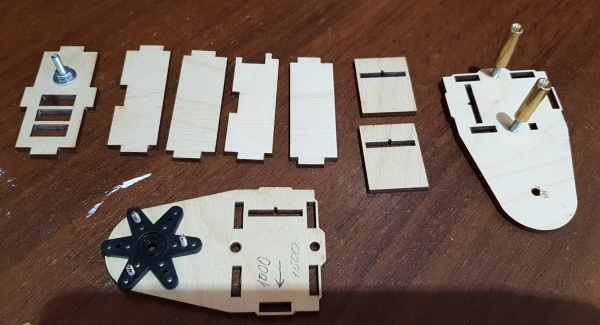
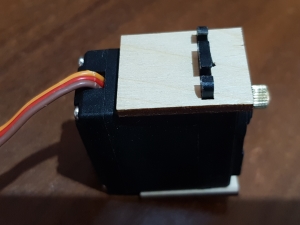
Ах да, нам еще понадобится сервопривод. На него необходимо установить 2 «подушки», которыми он будет фиксироваться в корпусе. Перепутать стороны очень сложно, в подушках есть специальный вырез под уголок на ушках сервопривода.
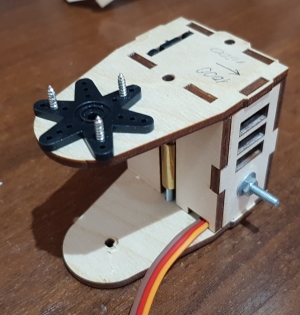
Далее ставим полученную сборку на нижнюю часть звена в специальный вырез и устанавливаем остальные детали в соответствии с моделью. Ось сервопривода должна совпадать с осью винта на другой стороне. Установку необходимо делать очень аккуратно без особых усилий, чтобы не испортить пазы. Получился следующий результат:

В конце ставим верхнюю часть звена, затягиваем винты и звено готово.
Звено 2
После поглощения пары кружек с чаем пришло время сборки второго звена. С виду собрать легко, но это самая рутиная часть. Для сборки понадобятся детали, показанные ниже. Кстати самая рутиная часть уже сделана — прикручены качалки для сервоприводов. И да, небольшой совет: закручивать саморезы быстрее всего плоскогубцами, крутя при этом саму деталь.

Дальше по сборке проблем быть не должно. Делаем все в соответствии с моделью и должно получится так:

Звено 3
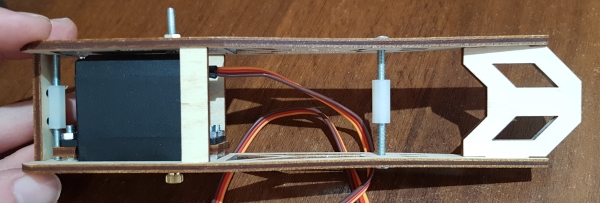
Наконец-то мы подошли к последнему звену будущей конечности. Необходимые детали для сборки набираем в соответствии с моделью и начинаем сборку каркаса:
Теперь нам понадобится сервопривод и подушки для него. Установить их необходимо следующим образом (для второго ушка сервопривода делаем так же).

Далее устанавливаем сервопривод в каркас и крепим его при помощи винтов. Так же устанавливаем вторую часть звена и затягиваем все винты. В данном случае я решил установить ось сервопривода ближе к центру звена — так лучше смотрится.
Наконец-то сборка всех деталей конечности i завершена
}
После завершения цикла сборки деталей конечностей, нужно соединить всё вместе. Думаю процесс надевания качалок на оси сервоприводов не нужно описывать. Должно получиться так:

Видео работы одной из конечностей:
Сборка рамы
Данная часть является самой простой и в подробных комментариях думаю не нуждается. Для сборки рамы нам понадобятся все оставшиеся детали. Сборку я решил начать с крышек, так как они собираются с участием клея и пока я буду собирать раму, клей уже высохнет (надеюсь).
Крышки собираются очень просто и перепутать там что-либо трудно. Должно получится так (нижняя крышка):

Как видно я залил клеем все места соединения деталей, чтобы вся эта конструкция не развалилась. Кстати, на удивление она оказалась довольно прочной. Верхняя крышка собирается аналогично, только при её сборки главное не перевернуть название гексапода.
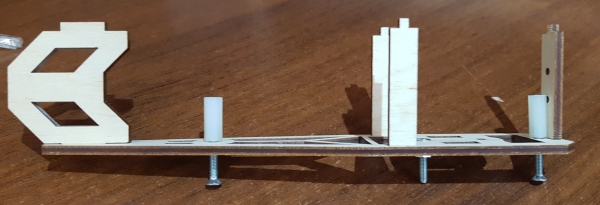
После сборки крышек пора приступать к сборке рамы. Сервоприводы к верхней части крепятся на прямую без подушек и затягиваются моими любимыми винтами и гайками М3. Далее ставим широкие и узкие стойки в пазы и цепляем нижнюю часть. Потом затягиваем все это дело винтами и радуемся результату (не смейтесь над отверткой, она многое пережила).
В раме стоят сервоприводы S3003, так как партия MG996R из 6 штук пока, что в пути, но размеры у них одинаковые.

После сборки рамы устанавливаем крышки на свои места, но их приклеивать не нужно. Выглядит это круто.

Результат
И теперь момент истины — установка всех ног на свои места. Думаю установить их на оси сервоприводов не составит труда. Результат ну просто шикарен:
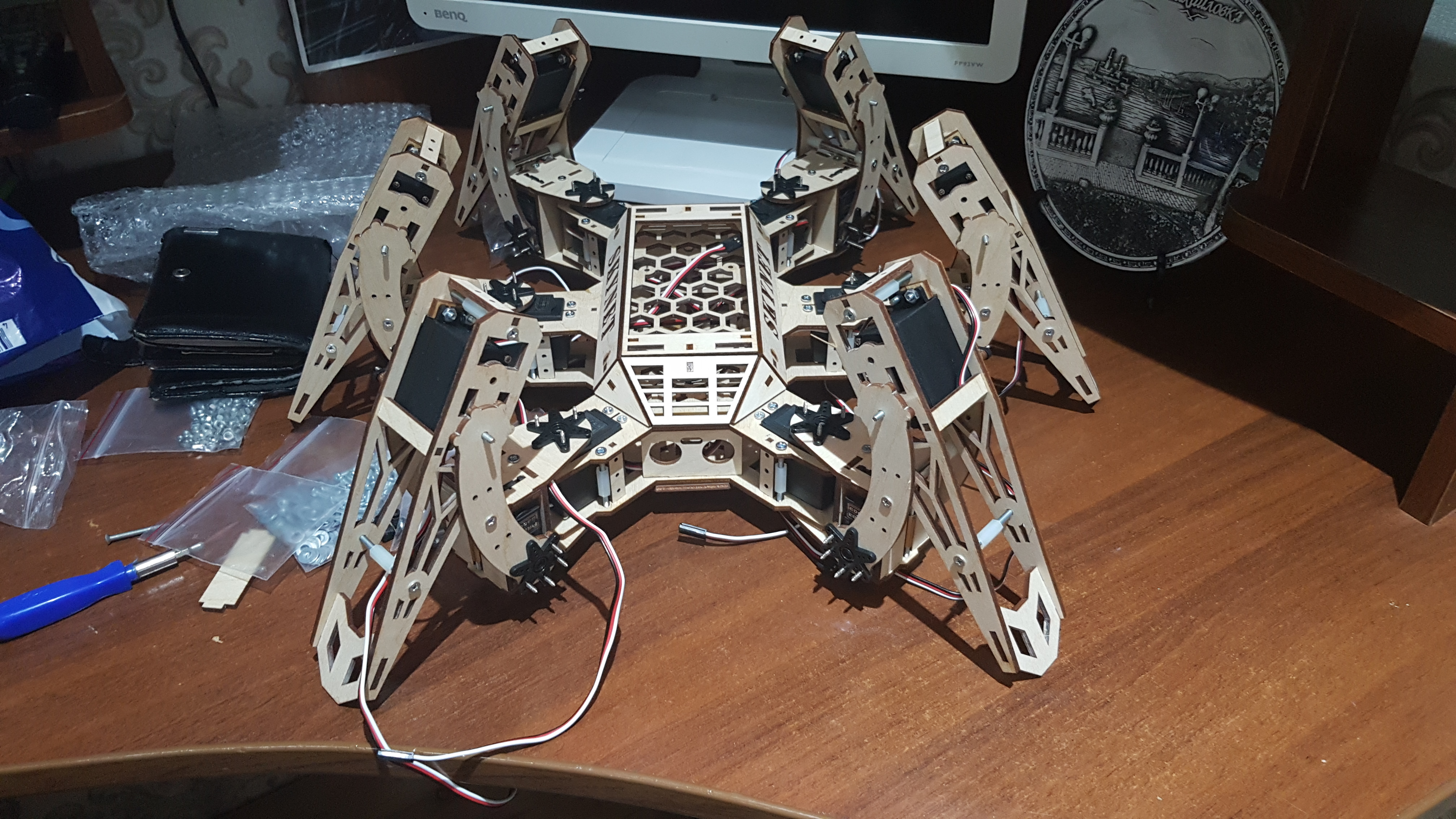
Да, он умеет вставать. Радости в этот момент было крайне много. Код писался на скорою руку, чтобы понять сможет ли он хотя бы встать. В сборке на видео везде стоят сервоприводы S3003, так как оно было снято до перехода на MG996R.
Грабли, тяпки и мотыги на которые я наступил
- Сервоприводы. Решил взять самые дешевые S3003 по 100 руб на шутку и пожалел об этом. Усилия хватает с запасом, но вот люфт это ужас. Ось сервопривода можно спокойно повернуть примерно на 10 градусов в любую сторону, при этом он не делает никаких попыток удержать положение. Если крутить больше, то он будет сопротивляться. И никаких плавных движений с ними реализовать невозможно.
- Неверное расположение опор. В результате этого в некоторых местах детали прогибаются при затяжке, особенно это заметно на 3 звене конечности.
- Чем больше кусок фанеры, тем сильнее он деформирован, особенно это заметно в раме. В итоге некоторых местах наблюдаются щели.
Решение: добавил по краям пару отверстий под винты

- Подшипники. Да, нужно было поставить подшипники. Эта мотыга черенком по ноге пока не стукнула, но я чувствую, что она приближается. Осевые отверстия быстро изотрутся под нагрузкой и будут люфтить.
Планы
В следующих статьях планирую рассказать про электронику робота и его базовую математику.
Комментарии (39)

MaxAlekseev
30.09.2018 22:53+4По сборке, что режет глаза — это винты с потайной головкой в не зенкованные отверстия. Либо винты с полукруглой шляпкой, либо зенкуем отверстия.
Imposeren
01.10.2018 07:18Еще и в дерево. И металл то, если с такой головкой перетянуть, плохо себя чувствовать будет (что легко сделать если нет зенковки), а дерево так вообще треснуть может… Так-что тут не только «режет глаза»…
third112
01.10.2018 09:08И не просто дерево, а фанера 3 мм. У меня самодельное рабочее место для клавы, мыши и т.д. стол-полка к стене, на которой монитор. Винты «в потай», зенкованные отверстия, фанера 15 мм, ok.

Neoprog Автор
01.10.2018 07:26Верно. Это косяк. Нужно будет поправить, но нечего критичного пока не произошло))
dfgwer
30.09.2018 23:38Название неудачное. Гуглить с таким названием одно мучение. Увидят например на фотке, захотят нагуглить, а найдут известно что.
Neoprog Автор
01.10.2018 07:14По запросу "Skynet гексапод" гуглятся обе части. Возможно название действительно не удачно, но все относительно.
dfgwer
01.10.2018 13:00+1Тут есть две вещи. Гугл использует персонализированную выборку, на своем рабочем компьютере без проблем все найдется, а у других совсем нет. Вторая, не каждый знает, что такие конструкции называются гексаподом, и догадается добавить в поисковый запрос.
Neoprog Автор
01.10.2018 13:33Возможно Вы правы, но когда я начал искать проекты, то быстро узнал как они называются. Да и название уже поздно менять)) Вырезано на крышке
alex_vesna
01.10.2018 02:49Сервы вполне себе ничего, по крайней мере для такого устройства. Какую библиотеку вы используете для управления? Люфт, дребезг и еще миллиард и одна проблема с сервами, могут быть прямым следствием выбора библиотеки работы с ними. Ну или как вариант кодом вашим. Например если вы пытаетесь ими просто тупо пошевелить, не разобравшись в вопросе.
Neoprog Автор
01.10.2018 07:19Сторонние библиотеки не использую — написал свою, но тут дело не в коде 100%. Завести ШИМ на частоте 50Гц очень легко. Да и осциллографом все проверено. Дело в самих серво: MG996R работают прекрасно, а вот S3003 нет. Возможно там китайцы намудрили в плате.
Их все равно нужно менять, так как пару пластиковых шестеренок ушли на тот свет
Ostrovv
01.10.2018 07:20… надеюсь автор осознает что это лютое «велосипедостроение», и полезно ток с целью прокачки смежных скилов используемых в «проекте», на али вроде полно комплектов
Neoprog Автор
01.10.2018 07:23Да, осознаю. Хочу понять как они работают, а чтобы хорошо это сделать его нужно собрать самому. Да, Вы правды — это проект для прокачки моих скилов, да и робот на полке не помешает))
На али есть много чего готового, но это не повод не браться за это.
third112
01.10.2018 08:52+1Чем больше кусок фанеры, тем сильнее он деформирован, особенно это заметно в раме. В итоге некоторых местах наблюдаются щели.
На эти грабли я наступал, поэтому предупредил. Сожалею, но дальше будет хуже. Создавая подобные самоделки мы сознательно или бессознательно берем пример с окружающих нас вещей. Но не нужно забывать, что современный мир — мир непрочных вещей. Полвека назад вещи делались с многократным запасом прочности, сейчас ровно столько — сколько нужно. Это усложняет конструирование, но при массовом производстве такое усложнение оправдано. А в единичных оригинальных конструкциях лучше следовать устаревшим принципам многократного запаса.Neoprog Автор
01.10.2018 11:09В более менее стабильной версии, когда чертеж корпуса устаканится перейду на более хорошие материалы. Еще же кучу датчиков ставить нужно, а фанеру дешевле всего резать. Для отладки думаю самое то))
defecator
01.10.2018 09:26А можно посмотреть сам проект в Компасе? Или не планируется пускать его в интернеты?
Neoprog Автор
01.10.2018 11:13Конечно можно. Проект открытый. Могу в личку чертежи скинуть (3D сборка там же)
8street
02.10.2018 11:20Выложите, пожалуйста, чертежи на Github или Ядиск, наконец, чтобы все могли скачать.
Neoprog Автор
02.10.2018 13:27+1Добавил ссылку с чертежами в первую часть.
Дублирую тут: drive.google.com/open?id=1KHteI6MK5aWlVP0mCM4DmjNJArnF98Ur
DelphiCowboy
01.10.2018 10:48А как у него с передвижением по неровной местности?
Neoprog Автор
01.10.2018 11:11Передвижение еще в процессе разработки. Пока что планирую научить ходить по ровной поверхности.
GBenG
01.10.2018 11:09Я бы еще посоветовал автору в будущем добавить датчики касания. Не то чтобы без них работать не будет, но с обратной связью можно будет избавиться от «прыжков» и «подергиваний» при перемещении, и задача по проектированию станет куда интереснее)
Neoprog Автор
01.10.2018 11:10Да, планируется поставить датчики касания на концы ног. Пока еще не определился с реализацией. Думаю какие-нибудь концевики поставить или кнопки. Буду рад советам
GBenG
01.10.2018 11:39Ну миниатюрные концевики самый очевидный вариант. Остальное дороже и сложнее. Только, учитывая условия работы, сразу же стоит подумать о легкой замене в случае поломки. И выбрать какой-нибудь распространенный вид, который можно купить «по месту», чтобы не ждать их потом с алика месяц.
Shtucer
01.10.2018 12:29+1Статьи писать начал недавно. Чего добавить, чего удалить?
Традиционно: спеллчекинг и вычитку. Хорошо, когда статья содержательная и интересная. А когда в ней нет досадных ошибок, опечаток и словесного мусора — лучше раз в стопиццот.
Gryphon88
01.10.2018 13:53Я правильно понял, что:
— Дизайн разрабатывался исходят «так красивше будет», без прикидок кинематики?
— Нагрузки не прикидывались, фанера 3мм взята больше по привычке, поскольку раньше хватало?Neoprog Автор
01.10.2018 14:15— Дизайн разрабатывался исходят «так красивше будет», без прикидок кинематики?
Кинематику прикидывал, но и внешний вид не оставлял без внимания. 50 на 50 вообщем. А что, есть какие-либо замечания на счет кинематики? Если да, готов выслушать, так как я нашел мало информации по поводу расположения ног, их размеров и т.п.
Нагрузки не прикидывались, фанера 3мм взята больше по привычке, поскольку раньше хватало?
Прикидывались. Проводил примерный расчет нагрузки на 1 ногу с точностью +-100г, так как не учитывал некоторые величины. Фанеру взял по привычке и исходя из опыта.Gryphon88
01.10.2018 14:53PatientZero публиков хорошую серию переводов про кинематику, например. Т.е. я бы взял Unity и в ней бы поигрался, заодно получил бы часть кода и упростил тестирование. Ещё были неплохие статьи про V-REP и ещё одного гексапода, там кинематика рассмотрена довольно подробно.
ELEKTRO_YAR
01.10.2018 16:46Поиграться с гексаподом можно еще в ODE, если есть навык программирования на С. За вечер можно набросать код и походить.
Gryphon88
01.10.2018 17:12Спасибо, этот инструмент для меня нов. Давно хотел попробовать щупальца, но лень возиться с тросами и муфтами.
UPD а, ODE как движок используется симами Webots и V-REP.
ELEKTRO_YAR
01.10.2018 16:42Мне кажется, что если делать корпус из фанеры, то было бы неплохо потом его чем нибудь покрыть для долговечности.
mwambanatanga
Статья хорошая. А вот голосования неправильные — все варианты ответа какие-то пессимистичные. Поэтому отвечаю в комментариях.
Про всё. Очерёдность изложения определяется авторским замыслом. А советы читателей это примерно как ответ Короля из «Алисы в Стране Чудес»:— С чего начинать, Ваше Величество? — спросил он.
— Начни с начала, — важно ответил Король, — продолжай, пока не дойдешь до конца. Как дойдешь — кончай!
Всего добавить, ничего не удалять.
Neoprog Автор
Спасибо за советы)) Я так и планировал, что люди не нашедшие варианты в опросах будут писать в комментарии. Да, опросы не очень, согласен.