

Общий ответ на данный вопрос еще готовится, но про частный зато реальный и свежий пример могу привести прямо сейчас. Оказался тут у меня в руках, как всегда случайно, текст от ведущего специалиста нашей страны по электроприводу Калачева Юрия Николаевича, автора книги Моделирование в электроприводе. Инструкция по пониманию. вместе с его любезным согласием на публикацию. Данный текст еще готовится к публикации в специализированных издания, но читатели хабра увидят его первые.
Далее под катом
Калачев Ю. Н., Ланцев В.Ю., Окулов Е.В.
Электропривод с бесколлекторным двигателем постоянного тока
(практика применения моделирования и кодогенерации в АО «Аэроэлектромаш»)
Ура, товарищи!!! Свершилось!!!
«Рабоче-крестьянская революция, о необходимости которой всё время говорили большевики, совершилась!»
Наконец мы увидели плоды прогрессивных тенденций произросшие в отечественном приводостроении.
В статье рассматривается технология проектирования электропривода с использованием моделирования и кодогенерации. (Правильное модельно ориентированное проектирование)
Что касается моделирования – это вопрос для наших приводщиков не новый. А вот автоматическую кодогенерацию программы контроллера электропривода из его модели, и в мировом масштабе, мало кто пробовал.…
Мы смеем утверждать, что эта полезная тенденция (автоматического написания программы другой программой) будет активно развиваться в будущем цифровом мире …. Выиграет тот — кто начнет раньше.
Хотим оговориться, что кодогенерация, на наш взгляд не отменяет и не заменяет программиста, а только помогает ему. При этом, естественно, считаем, что СИ-код сгенерированной программы должен быть для него открыт.
Так и поступаем, результат автоматической генерации кода — код Си, открытый для просмотра и анализа.
В нашем случае, объектом управления являлся некий электропривод с бесколлекторным двигателем постоянного тока (БДПТ), вал которого соединен с редуктором, превращающим вращение в поступательное движение штока.
Задача электропривода достаточно стандартная – позиционировать вал штока, желательно побыстрее и поточнее … Часто такие привода используются для управления рулями беспилотных летательных аппаратов.
Блок управления устройством был спроектирован и изготовлен в отделе электропривода АО «Аэроэлектромаш» на базе микроконтроллера 1986ВЕ1Т (АО «ПКК Миландр»). Необходимо было создать алгоритмику и программу управления контроллера с целью дальнейшего ее использо-вания в практических задачах.
Работа была выполнена совместно специалистами компании «3В-сервис» и сотрудниками отдела электропривода АО «Аэроэлектромаш».
Первая задача, которая стояла перед нашим коллективом – идентификация объекта управления. Для этого были проведены некоторые измерения характеристик двигателя, которые оказались достаточно специфичными.
Например, измеренная ЭДС двигателя имела весьма причудливую форму, представленную на Рис.1.<br?

Рисунок 1. Измеренная ЭДС двигателя.
Если читатель знаком с программой Simulink, то ему известно, что там, в модели двигателя с постоянным и магнитами, имеется возможность выбора синусоидальной или трапецеидальной ЭДС.
Ну, и куда бедному крестьянину податься? Где здесь синус, и где трапеция? (Правильные средства моделирования должны быть открытыми!). В среде SimInTech можно учесть даже такие неидеальности двигателя. Нами была задана форма ЭДС представленная на Рис.2

Рисунок 2. ЭДС двигателя созданная в SimInTech
Найдите два отличия в Рис.1 и Рис.2. Мы нашли одно – цвет.
Следующей особенностью двигателя оказался его существенный зубцовый момент, обусловленный геометрией магнитопровода статора и отсутствием скоса пазов у магнитов ротора. Момент был измерен экспериментально и введен в модель. График зубцового момента показан на Рис.3.

Рисунок 3. Зубцовый момент.
Кроме того в модели двигателя были учтены потери на намагничивание, что отсутствует в математических моделях у других разработчиков моделирующих программ.
Далее работа электропривода сравнивалась с результатами моделирования в тестовых режимах. Ниже на Рис. 4 и 5 приведены результаты опыта холостого хода (максимальная частота без нагрузки).

Рисунок 4. Холостой ход. Реальный двигатель.

Рисунок 5. Tок фазы холостой ход. Результат моделирования.
Вывод:
Осциллограммы реального и модельного холостого хода совпадают. Визуально разницы не видно.
После успешного опыта холостого хода был проведен опыт динамического воздействия на двигатель с присоединенным редуктором. В этом опыте на обмотки двигателя подавалось постоянное напряжение с реверсом на частоте 30 Гц. При этом выходное звено совершало колебания с той же частотой. На Рис.6 приведены результаты этого опыта:
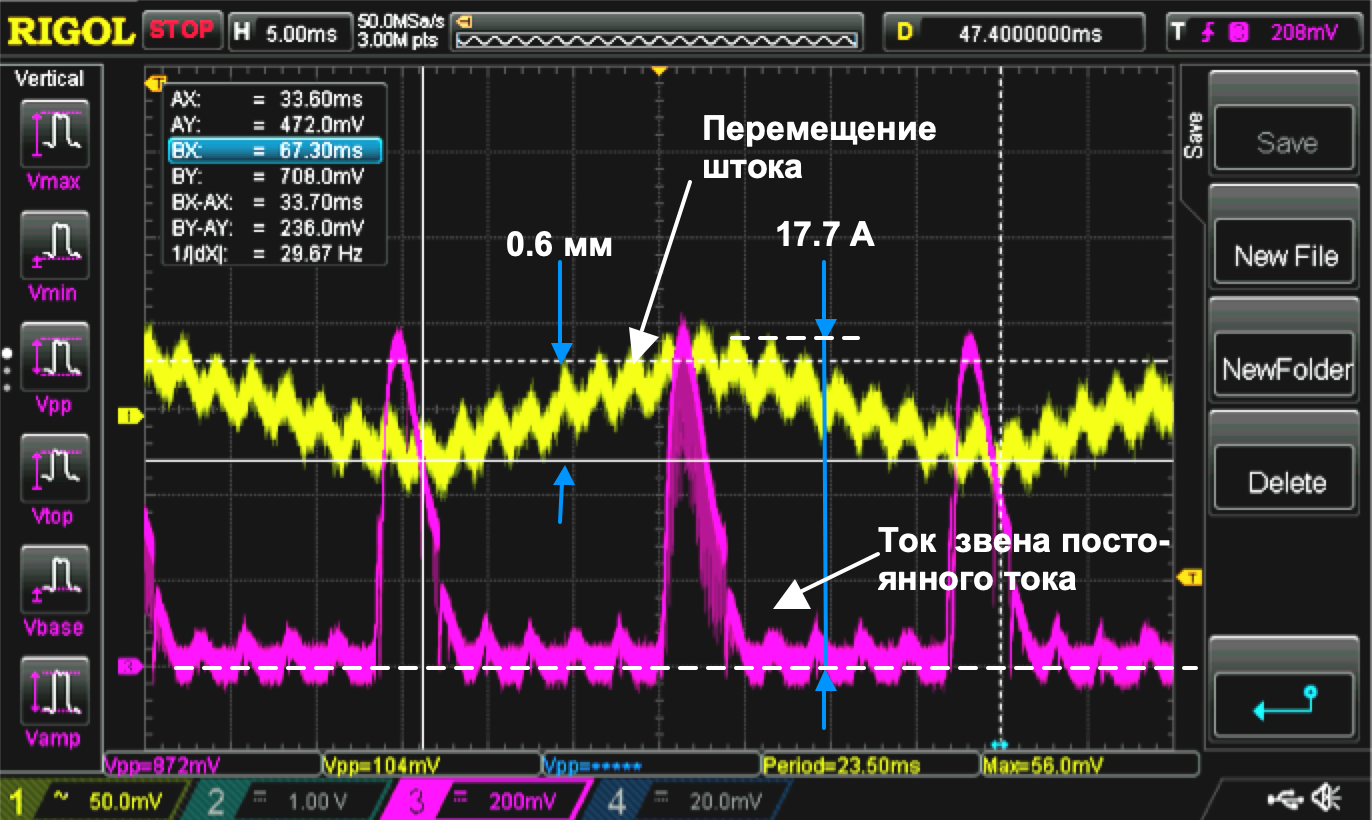
Рисунок 6. Реальный двигатель под нагрузкой
(Сигналы снимались с помехами. Высокочастотное дрожание и размытие – это помехи в сигналах датчиков положения и тока).
Полученные данные сравнивались с моделью привода, работающей в аналогичном режиме (Рис.7).

Рисунок 7. Работа модели под нагрузкой
Выводы:
Вид верифицированной модели силовой и механической части электропривода построенной на стандартных элементах библиотек программы SimInTech представлен на Рис.8.
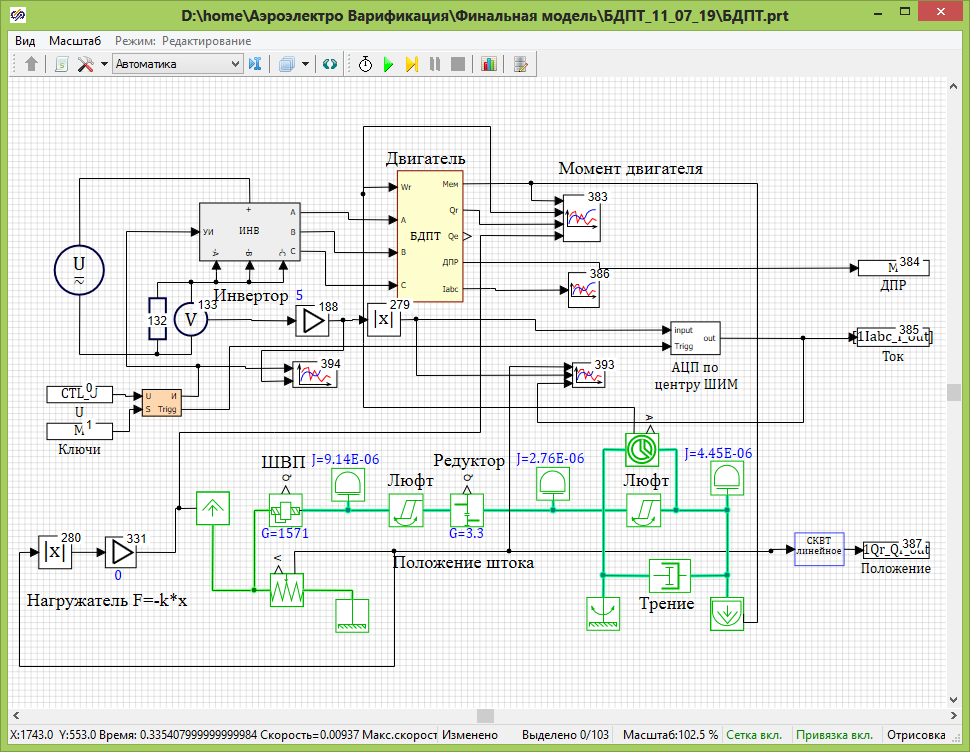
Рисунок 8. Схема комплексной модели электроопривода, включая механическую часть.
Она и состоит из моделей:
- силового инвертора
- двигателя с датчиком положения ротора (ДПР)
- механической передачи
- датчика тока
- нагружателя
Убедившись, что поведение модели соответствует поведению реального изделия, по результатам моделирования можно выбрать необходимую структуру системы регулирования (СУ) и произвести ее настройку для разных типов, перечисленных в техническом задании, входных воздействий.
В нашем случае хорошие результаты показала двухконтурная система регулирования положения с демпфирующей связью по скорости. Вид модели этой структуры представлен на Рис.9.
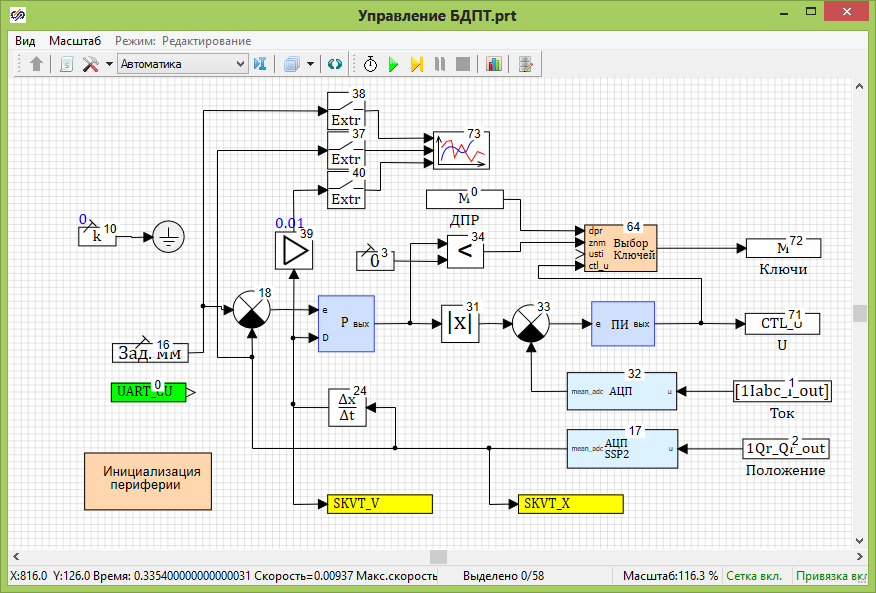
Рисунок 9. Расчетная схема программы управления электроприводом.
При дальнейшем использовании кодогенерации нет необходимости в ручном кодировании алгоритмов системы регулирования — готовый проект в среде разработке Keil uVision создается автоматически. После сборки бинарного образа программы ее можно транслировать в наш процессор (1986ВЕ1Т).
Заметим, что блоки модели «Выбор Ключей», «Инициализация периферии», «АЦП», «АЦП SSP2» в режиме моделирования реализуют соответствующие математические модели, а при кодогенерации заменяются библиотеками работы с периферией используемого процессора.
После выбора структуры СУ и ее настройки нам оставалось:
- осуществить автоматическую кодогенерацию программы
- записать полученную программу в контроллер
- зафиксировать великолепный результат
По Рис.10 можно сравнить работу модели и реального привода. В качестве задания по положению использовалась синусоида частотой 3 Гц и амплитудой 3мм.
Для получения данных с контроллера в его программе была предусмотрена специальная часть, обеспечивающая считывание внутренних сигналов по последовательному интерфейсу. Пользователь во время работы привода в окне SimInTech видит результаты работы встроенного ПО.

Рисунок 10. Сравнение работы модели и реального привода.
Ну, здесь даже цвет одинаковый ….
Ура, товарищи!!! Свершилось!!!
Всем кому интересна тема электропривода рекомендуем скачать бесплатно книгу Калачев Ю.Н Моделирование в электроприводе.
Комментарии (44)

Dima_Sharihin
22.07.2019 10:34+1Что касается моделирования – это вопрос для наших приводщиков не новый. А вот автоматическую кодогенерацию программы контроллера электропривода из его модели, и в мировом масштабе, мало кто пробовал.…
Простите, но для кого тогда придумали Simulink? MATLAB генерит код для микроконтроллеров уже не знаю сколько времени, как. Есть целые компании, занимающиеся реалтаймовыми симуляторами моделей (dSPACE, как пример).
Вопрос лишь в том, что легальное использование стека технологий на базе MATLAB стоит неприлично огромных денег, потому все обходятся велосипедами
petuhoff Автор
22.07.2019 10:44-1Что бы загрузить код сгенерированный из matlab в микроконтроллер и отладить вам нужно столько же програмистов, сколько для того, что бы его написать + специалист по matlab. А если у вас двигатель такой как в статье см. Рис.1, где модель двигателя из Simulinka не подойдет. И нужно будет писать еще и модель двигателя.
Ну и удаленная отладка, когда работа алгоритма, в контроллере отображается на схеме, этого тоже нет в Simulink.
А стоимость ПО это не главное.petuhoff Автор
22.07.2019 13:16Кстати пример dSPACE как раз и показывает, что для того что бы код из Simulink загнать на контроллер и посмотреть как же он всетаки работает нужно еще отдельную компанию подключать, которая смоделирует таргет. (dSPACE например)

embedded_drive
22.07.2019 15:06В симулинке давным давно есть удаленная отладка кода. Это называется External Mode, и может быть разработана для любого процессора самостоятельно.
Для все ключевых MCU для управления приводами (TI, например) она есть. Более того, ребята хорошо показывают, что и высокочастотное управление на ПЛИС не сложно реализовывать. Вот трехлетний вебинар где и удаленная отладка, и генерация кода для СнК показываются. http://matlab.ru/webinars/razrabotka-sistem-upravleniya-na-baze-zynq-v-matlab-i-simulink.petuhoff Автор
22.07.2019 15:29В этом вебинаре они опять показывают входные воздействия в виде заданных сигналов и почему то называют это Model Based Design. Модели объекта вообще нет, от слова совсем. В примере же статьи работает двигатель с механическим приводом, он и формирует тестовые воздействия на ПО и код. И происходит отладка работы модели объекта и ПО.

embedded_drive
22.07.2019 15:43+1Относительно контента вебинара — неправда. С 4:50 объясняется из чего состоит системная модель. И через несколько секунд показывается моделирование объекта управления.
petuhoff Автор
22.07.2019 15:51уже посмотрел это я ошибся. воздействия не двигатель действительно, а не на код. Просто листал быстро.
petuhoff Автор
22.07.2019 15:30Высокочастотное управление не сложно реализовать, сложно посчитать обратное воздействие, что будет на сенсоре для этого нужна модель объекта, которым мы управляем.
on4ip
22.07.2019 22:21С SimInTech не работал, но модели двигателей в симулинк разные использовал, вплоть до параметризация данными FEM анализа из Ансис. Да и проекты под лютый китай с формами ЭДС зависящими от оборотов, нагрузки и фазы луны.Не замечал каких либо проблем.
petuhoff Автор
22.07.2019 22:23То есть модель двигателя брали не готовую, в которой два вида ЭДС трапеции и синусойда а разрабатывали сами из стандратных блоков?
on4ip
23.07.2019 06:43Нет, зачем. Там же просто подключаются результаты моделирования моторов в максвеле том же, если очень точно процесс нужно помотреть. А так готовые блоки отлично работают. Ещё очень нравится как реализованна завязка на тепло элементов схемы, при моделировании длительных процессов нам очень полезно оказалось.
petuhoff Автор
23.07.2019 10:33Вот тут согласен, если моделировать в Simulink электродвигатель используя ANSYS Maxwell, то результаты могут быть и не плохие. Говорят суп из топора тоже наваристый получается, если гречки и тушоки добавить.
on4ip
23.07.2019 10:39Ну так вы сделали тоже самое в статье, задали табличку по эдс только не из Maxwell данные а в ручную из CSV файла осциллографа полученные. К моделированию же способ параметризации не имеет отношения. А интересно ваши модели учитывают изменение потока машины от температуры?
petuhoff Автор
23.07.2019 11:55Вобще то я ничего на задвал, я даже не автор статьи. Вопрос не ко мне, это вобще то не моя специальность, я до недавнего времени считал, что электропривод это настолько прост, что в любом моделирующем продукте все должно из коробки работать и там нет проблем и даже убогий Simulink должен считать его на раз два. Но оказалось, что там не все так просто. И попытки собрать на Simulink быструю и точную модель электромотора упираются в особенности и ограничения самого Simulink. Разрабочики электродивгателей попробовали SimInTech после Simulink и сказали, что тут гораздо быстрее считает и больше возможностей.
Исторически SimInTech работает там, где русские продавцы Matlab Simulink не могли решить конкретные производтвенные задачи (не важно это рукожопость продавцов или фатальный недостаток Simulink). :))))))
Если не барть в пример задачи управления АЭС, откуда изначально появлися SimInTech. то последнии кейсы:
1) расчет охлаждение датацентра, с учетом 8 000 юнитов на три сервера в каждом из которых 4 вентелятора со своей логикой управления.
2) расчет солнечной батареи спутника с учетом затенения от воспомогательных устройств.
В обоих случаях первое решение предлагаемое продавцами Matlab Simulink нихрена не работало так как нужно заказчику. С приводом получилось так же. Калачев Юрий Николаевич занимается приводами с 1987 года Автор книги Вектороно регулирование. Заметки практика. (в книге есть его почта для связи) И он всегда использовал Simulink пока как то раз не встретился с разработчиками SimInTech. В итоге он объяснил разработчику электрической модели SimInTech, что ему не хватет для счастья, электрик из SimInTech поставил задачу для доработки в математическом ядре и в итоге получился в продукт который покрывает Simulink в области моделирования электропривода как бык овцу. Сам удивлен. Подробнее в книге "Моделирование в электроприводе" Специалисты после практического использования решения в восторге об этом и текст.on4ip
23.07.2019 12:03Да особого восторга я не вижу, задача то не относится к сложным, мой опыт работы с моделями в simulink говорит о том, что все отлично работает и считается. Ну и не понятно раз вы сами ничего не делали, откуда утверждения, что есть какие то проблемы с приводами в Simulink, единственно с чем я сталкивался когда рассказывали про проблемы моделей Simulink, так это проблемы в восприятии мира у пользователей.
Юрий Николаевич, кстатие еще книги писал и модели в simulink делал.
В общем мне не понятно откуда крытье вашего быка овцами взялось, уверен проблема на user side.petuhoff Автор
23.07.2019 12:11Человек занимающийся приводами с 1987 года, вполне мог решить все проблем на user side. Это вобше не первый случай когда на практике Simulink паказывает свою неприменимость по различным причинам, возможно все встреенные нам пользователи были рукожопыми. Но SimInTech c 1998 года, тогда еще под именем ПК МВТУ решал комерческие задачи, там где Simulink валился на user side проблемах.
on4ip
23.07.2019 12:18Вы извините но это на какие то оправдания похоже+)я тоже 10 лет приводами занимаюсь, с проблемами в Simulink не сталкивался, что дял синхронных что для асинхронных машин, SRM управление делали. Коллеги серво системы делали. В общем нелинейные эффекты в Simulink моделируются легко в базовых блоках.
petuhoff Автор
23.07.2019 12:25Базовые блоки это понятно и не вызывает вопросоов. Еще можно легче в на матлабе на языке или даже на фортране написать мат модель модель. Вопрос как потом с ней работать. И я вобще считал что электромоторчики это где Simulink должен был зачистить всю поляну и решить все проблемы, но оказалось не так. А точ то у вас нет проблем с Simulink значит вам повезло, либо вы знаете Simulink досконально так что не наступаете на грабли. Вот допусти у меня ступор всегда вызвает одна проста вещица. включаешь график — и скорость расчета падает это шо? Это ошибка программиста 1 год обучения. Но до сих пор когда включаю в Simulink графики любой расчет начинает тормозить.
on4ip
23.07.2019 12:41+1А вы работали с MATLAB вообще? реально там блоки и на фортране пишут, питоне, Сях и тд и нет проблем с работой, а если проблемы есть… Ну их нужно просто решить, поучиться там, не лениться. Мне кажется беседа скатилась комменты ради комментов. Ваша статья показывает что у вас есть среда моделирования и в ней можно решать задачи, попытка сказать что в Simulink что то не работает, провалилось. Думаю лучше развивать свое чем пытаться найти косяки в чужом. Уверен, копнув вашу среду можно много чего выкопать.
petuhoff Автор
23.07.2019 12:54Я уже привел 3 примера включая видео, где показаны принципиально не решаемые проблемы Simulink на територии РФ. Принципиально не решаемые от слова совсем. По той причине, которую вы сам сформулировали разработчику Matlab не интерсны проблемы российских пользователей. Слишком мелкий рынок. Если для вас видео сравнения пользовательской модели ничего не говорит, то тут офтальмология бессильна. Мы же помогаем решать реальные проблемы. Та же проблем рассчета фильтра где расчет ускоряется в 10 раз, экномит время инженера и приносит реальную осязаемую прибыль.
Конечно если вы копнете нашу среду то выкопаете косяк и не один, но в отличие от Simulinк вы не будете посланы нах, поскольку найти разработчика который накосячил в MatLab невозможно. Мы же устраняем косяки практически сразу. Это преимущества тюнингованого барбуса, над среийной ренологан.
petuhoff Автор
24.07.2019 12:22Так не вопрос написать любой блок на фортране для Simulink или SimInTech, вопрос в дальнейшей поддержки и его использованию. Написали вы чудесный блок привода на фортране, и отдали пользователю, а пользователю захотелось учесть изменения вязкость масла при условии работы привода в отрицательных температурах. И что ему делать? Изучать ваш фортран и пытаться понять где же здесь формула расчета трения скольжения? Вся прелесть структурного моделирования в наглядности решения и возможности его быстро анализировать и изменять под конкретные задачи.
Например вот в этом примере (Скрещивая ежа и ужа), у меня модель двигателя изначально была на фортране и я для меня это темный лес и фортран и тем более двигатель авиационный. Но когда фортран привели к структурной схеме (причем не важно Simulink или SimInTech) то сразу стало понятно, где и что нужно поменять для учета новых эффектов. Я подключал гидравлическую систему с расчетом течения топлива и управления электроприводом клапана и наглядно видел как мой двигатель изменения положения. В случае если бы это двигатель был на фортране мне пришлось бы потрать год на изучение теории двигателей и еще месяца 2 на освоение фортрана.
petuhoff Автор
23.07.2019 12:17Вот тут например наш конкурент в свое время отказавшися изучать SimInTech поскольку он все считает на Simulink, описывает его user side пробелемы с моделирование простейшего гидравлического поршня в Simulink simscape:
engineerandreev.livejournal.com/3918.html
Цитата:
«Видно, что результат практически не отличается, за тем исключением, что Simscape почему-то начинает неистово дробить шаг в конце переходного процесса. Возможно, это связано со способом расчёта расхода, который в конце становится очень маленьким, а может и нет...»
«Примерно та же самая история. Результаты практически не отличаются, но Simscape почему-то безосновательно начинает дробить шаг. Что у него в голове? Я не знаю..»
Мои утверждения базируются на твредом финасовом оснвании, разработчики SimInTech уже 20 лет зарабатывает деньги на проблемах Simulink и с оптимизьмом смотрят в будущее! :))))on4ip
23.07.2019 12:21Ну я так понимаю, что SiminTech с его проблемами просто не интересен MATLABу, чтоб зарабатывать на них. На самом деле круто, что есть ваша среда, надеюсь количество ее скачиваний когда нибудь достигнет матлабовского.
petuhoff Автор
23.07.2019 12:41Matlab как и любоу другом западному вендору не итересны любые проблемы пользователей России — слишком мала доля рынка. Им интерсны только деньги, что правильно. Но местные продавцы матлаба у которых SimInTech отжирает кусок уже рассылают заказчикам SimInTech смешные письма почему Matlab лучше. На сегодняшний день по соотношению цена/пользва SimInTech делает Simulink как тузик грелку. Пример с Миландром ниже, пример с гидроприводом я взял от инженера Андреева. А вот пример одного из заказчиков по моделированию простого фильтра. Я даже не знаю что это фильтр делает. Мы повторили модель у нас и сами удивились.
Видео сравнения скорости расчет Simulink и SimInTech
petuhoff Автор
22.07.2019 13:16Кстати пример dSPACE как раз и показывает, что для того что бы код из Simulink загнать на контроллер и посмотреть как же он всетаки работает нужно еще отдельную компанию подключать, которая смоделирует таргет. (dSPACE например)
«VEOS is part of the MathWorks Connections Program. dSPACE works closely together with MathWorks to make sure that C code generated with the Simulink® Coder™ can be integrated and simulated with VEOS.»
А если вспомнить что для получение кода таргета и Simulink нужно использовать 3 (ТРИ!!!) продукта:
1)MATLAB Coder
2)Simulink Coder
3)Embedded Coder
При этом вся это красота сразу перестает работать, как только вы берете отечественный Миландр и проектируете свою плату, для которого нет поддержки соответствующего таргета.
В статье же пример реальный, когда весь процесс (Модель объекта — Создание ПО — Загрузка — Отладка на контроллере), выполняется в одной среде отсюда и восторг участников процесса.Dima_Sharihin
22.07.2019 13:30+1выполняется в одной среде отсюда
Хорошо, среда поддерживает МК от TI или Infineon? Мне вот не интересен Миландр. Понятное дело, что продукты поддерживают ограниченный диапазон вендоров.
Монстроузность dSPACE-овских решений в том, что они делают Hardware-In-Loop тесты, то есть объект управления имитируется в FPGA _в_реальномвремени. Понятное дело, если вам не нужно тестировать алгоритм в реальном времени без реального железа, от этого можно отказаться.
petuhoff Автор
22.07.2019 13:57Да что угодно поддерживает, если среда открыта и настраиваема, то обеспечить поддержку любого МК не является проблемой.
Объект управления в реальном времени в FPGA это возможно только для ограниченного набора моделей. Например уложить в логику FPGA модель какой нибудь теплообменника с «честной» теплофизикой вряд ли возможно.
С моей точки зрения, попытки загнать работу модели в «реальное время» на стадии отладки и проектирования ПО, не всегда оправданы. На стадии проектирования, достаточно обеспечить синхронизацию работы управляющей программы по тактам с модельным временем. И добиться того, что при заданных входных воздействиях система управляет объектом, так как требует проект. Даже если моделирование происходит медленнее или быстрее реального времени. После этого достаточно убедится, что цикл вычислений укладывается в временной такт работы в реальном времени на контроллере.
Хотя возможно для систем, где простые алгоритмы и главная проблема обеспечить передачу данных от сенсоров в контроллер и воздействия на исполнительные механизмы тестирование реальном времени действительно необходимы.kinall
22.07.2019 20:35+1О поддержке иностранных МК в отечественном SimInTech:
Да что угодно поддерживает, если среда открыта и настраиваема, то обеспечить поддержку любого МК не является проблемой.
О поддержке отечественных МК в иностранном Simulink:
Это костыли и палки от продавцов в России
Хм-м… Кажется, всё дело в фатальном недостатке Simulink!petuhoff Автор
22.07.2019 20:43Вы сильно удивитесь на SimInTech стоит не сильно дешевле Simulink. В свое время его удалось продать даже Вексельбергу у которого даже яйца Фаберже. Когда проектировали трубопровод Восточная Сибирь Тихий Океан. Там покупалось все самое модное западное и фенушуйное. Но когда встал вопрос в каком моделирующем пакете собрать модель системы управления, оказалось что Simulink c Matlab валятся при попытке смоделировать управление одной насосной станцией, не говоря уже о десятке.
petuhoff Автор
22.07.2019 20:53Так в этом вся и разница, один гребет, другой дразнится.
Когда вы настраиваете чужой продукт, без доступа к разработчику — вы бьетесь головой о стену, найти автора не представляется возможным физически и исправить по вашему желанию ничего нельзя. Потому что западному разработчику на 0.001% мирового рынка просто плевать. А когда вы можете зайти к разработчикам и поговорить о ваших проблемах, и для вас внесут изменения в ядро и допишут нужные функции это бесценно.
Или вот это недавник кейс, когда просто солнечную батарейку Simulink не осили в нужно постановке для заказчика. Простую солнечную батарейку.
simintech.ru/articles/2017_solar_panels.pdf
petuhoff Автор
22.07.2019 21:02www.grs.de/en/content/support-software
И немцы SimInTech используют для того что бы не платить за лицензию!
The ATHLET GCSM Modeler was developed by GRS on the basis of the software SimInTech by 3V-Services, Russia (free run time licence). It substitutes the former GCSM Input Data Generator based on the expert system shell G2 of Gensym, USA, which required a license.
embedded_drive
22.07.2019 14:47+1А здесь пример с Миландром есть: http://matlab.ru/webinars/avtomaticheskaya-generatsiya-koda-dlya-ekb-milandr
petuhoff Автор
22.07.2019 15:06Это костыли и палки от продавцов в России, у которых нет доступа к ядру системы MatLab. Но даже при условии доступа к исходным кодам, продраться через три продукта до ядра, та еще задача. А если вспомнить что для получение кода таргета из Simulink нужно использовать 3 (ТРИ!!!) продукта:
1)MATLAB Coder
2)Simulink Coder
3)Embedded Coder
К тому же модель электродвигателя в этом проекте из Simulink не подходит. В реальности она работает по другому см. рисунок 1
Потом нельзя отобразить на схеме в процессе отладки кода в контролере его работу. Последний рисунок из модели которая подключена к контроллеру и отображает его работу на схеме.
Ну и сам код ПО из автоматического кодогенератора, тоже не без странностей. Например, для интегратора matlab генерирует такой код:

Отличное решение, -0.01 это временной шаг интегрирования.
Как только запустил с другим шагом система не работает. Опять генерит код, опять заливаем.
А ведь определение оптимального такта работы управляющей программы это практическая и реальная задача, при проектировании любой системы управления.
Так что восторг участников когда у них реально заработала понятен
roslovets
22.07.2019 19:24+1Для создания пакетов поддержки микроконтроллеров для MATLAB не нужны палки и костыли, как и доступ к ядру, все описано в документации. И продираться через продукты не надо, они все работают слаженно из коробки.
Придирка к коду тоже странно выглядит, учитывая, что из Simulink без проблем можно генерировать код, исполняемый с произвольным тактом.
А выбрать оптимальный такт работы проще простого благодаря PIL-тестированию, которое работает по нажатию кнопки и позволяет проводить профилирование исполняемого кода на микроконтроллере прямо из Simulink.
Вы если что, всегда можете обратиться к российским представителям, они вас просветят по поводу возможностей. Может быть и модель двигателя более точную покажут.petuhoff Автор
22.07.2019 19:39Да что вы говорите. Генерится в миландр из коробки? Смешно.
Модель более точную они покажут? У них на стенде модель с реальной не совпадают в вебинаре выше ссылка. А здесь для двигателя с нестандартной ЭДС, да еще на нашем Миландре который сам по себе работает не так как написано в документации у них все заработает. Да верю, конечно в эти сказки венского леса.
По какому нажатю кнопки изменяется такт? Посмотрите внимательно это пример из матлаба, в коде шаг интегрирования в виде числа 0.1. Запускать это код с другим тактам просто нельзя.roslovets
23.07.2019 14:37+1Очевидно, не до конца вы освоили суть модельно-ориентированного проектирования, раз такое пишите :) Ничего, я объясню.
Сгенерированный код нужно запускать ровно с тем тактом, с которым алгоритм работает в модели, потому что код — это артефакт, производная модели, и расходиться с ней не должен.
Если же нужно сделать алгоритм, исполняемый с произвольным тактом, это в Simulink делается легко, например с помощью Triggered Subsystem, из которой также генерируется код. Если у вас есть лицензия на Embedded Coder, попробуйте. Если нет, можете запросить триал у представителей, они вам и с Миландром помогут разобраться. В сказки верить не обязательно, как и рассказывать их.petuhoff Автор
23.07.2019 18:19+1Про суть МОП очень смешно получилось. Как раз это извращение модельно-ориентированного проектирования почему то у Matlab даже в официальной документации проглядывается, а у русских продавцов матлаба это извращение вобще стало нормой.
На самом деле в модельно-ориентированном проектировании слово модель, это про модель объекта управления. Почему пользователи и продавцы Matlab считают, что здесь речь идет о модели программы управления, лично я не понимаю. Даже статью написал по этому поводу. Модельно ориентированное проектирование
Код программы управления и модель программы управления в нормальной среде это одно и тоже. По хорошему они вообще должны быть математически тождественны, с учетом возможностей таргета конечно.
Когда вы говорит о совпадении значения такта в моделирующей среде и на таргете, вы говорите о последних стадиях отладки кода.
Я же рассматриваю процесс проектирования целиком. На стадии проектирования, я ставлю блок интегратор, который должен интегрировать переменную и выдавать накопленное значение. С точки зрения разработчика СУ не важно какой шаг интегрирования важна накопленная сумма. А в процессе проектирования я должен иметь возможность запустить алгоритм с разным тактом, причем здесь Triggered Subsystem? Задача то исследовательская, я не знаю в начале какой шаг меня удовлетворит. В Simulink я должен при измени шага заново генерировать кода загружать его на таргет что бы посмотреть как он работает. В SimInTech я могу менять шаг интегрирования и такт исполнения, не запуская снова генерацию кода, при этом интеграл у меня будет содержать правильное значение вне зависимости от такта исполнения. Для больших проектов возможность анализировать запуск с разным тактом без повторной генерации большой плюс. Код Simulink этого не позволяет.
DenisHW
22.07.2019 10:50+1Например, измеренная ЭДС двигателя имела весьма причудливую форму, представленную на Рис.1.
Возможно, это техника third harmonic injection. В результате ток синусоидальный, а напряжение питания может быть меньше.

pavelpromin
КДПВ — это гифка. Через какое-то время Шэрон Стоун перекинет ногу...
c_kotik
У вас
кармаспина белаяpetuhoff Автор
Она перекидывает кода текст прокручиваешь и он уходит за пределы экрана.