
Мы же представляли модель ракеты ФАУ2 в виде одной передаточной функции, можно посмотреть здесь… И, вроде, все работало. Зачем же нам нужно сначала изучать математический анализ и дифференциальные исчисления, когда есть волшебная кнопка, получающая модель из испытаний?
Действительно такой подход может применяться, но для этого нужно два условия:
- Объект уже должен быть (не подходит для проектируемых объектов).
- Данные измерений должны быть полными и достоверными.
В любых других случаях – «хотели как лучше, получилось как всегда» (с).
Например, в этой статье про моделирование электропривода показано, что «при некотором пороговом значении точности измерительных приборов модель привода становится неидентифицируемой, что приводит к потере управляемости и невозможности диагностирования»
В этой же статье мы разберём магию и волшебство создания моделей в виде передаточных функций из ТАУ, а потом осуществим сеанс разоблачения данной магии.
Итак, сначала магия
Разберем простой пример. У нас есть модель механического демпфера. Это поршень на пружине, он движется внутри цилиндра, может перемещается вверх-вниз. Его положение – это интересующая нас функция Y(t), сверху на него воздействует возмущающая сила (U(t)), на стенках поршня действует сила вязкого трения. (См. рис. 1)
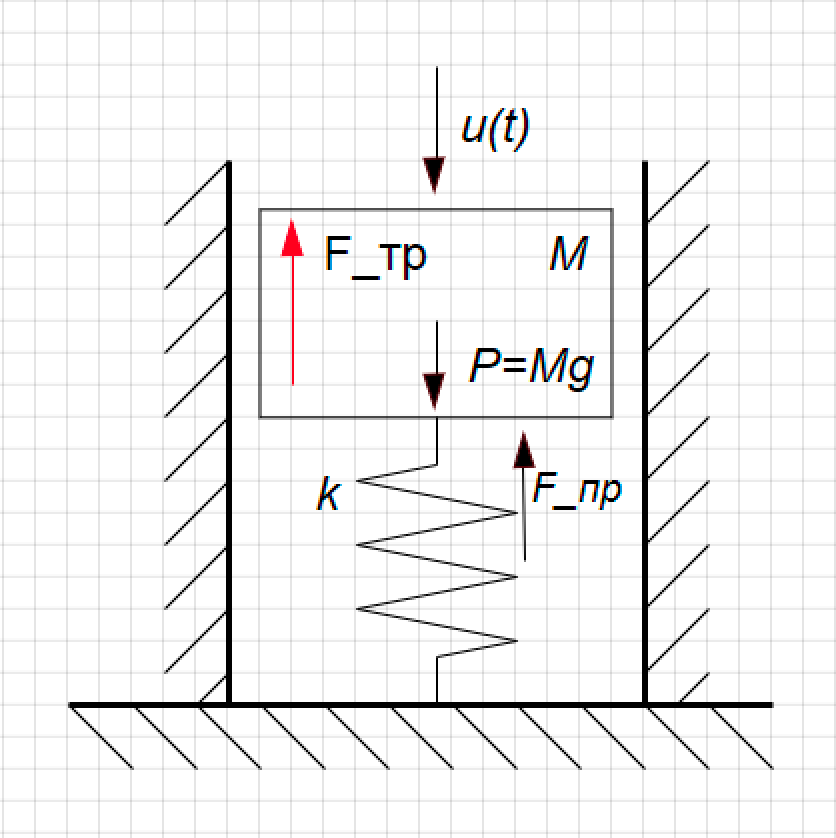
Рисунок 1. Расчетная схема амортизатора.
Выведем передаточную функцию для этого звена.
Те джедаи, кто уже знаком с магией передаточных функций, могут пропустить данную часть и перейти сразу к разоблачению магии, а для юных падаванов раскроем всю технологию получения уравнений динамики.
Согласно 2-му закону Ньютона ускорение тела пропорционально сумме сил, действующих на тело:
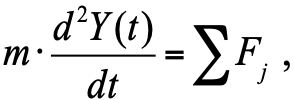 , (1)
, (1)где m – масса тела; Fj — силы, воздействующие на тело (поршень демпфера).
Подставляя в уравнение (1) все силы согласно рис. 1, имеем:
 (2)
(2) где:
Y(t) – положение поршня;
P = m•g – сила тяжести;
F_пр = k•Y(t) – сила сопротивления пружины;
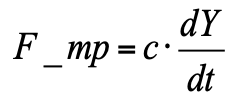 – сила вязкого трения (пропорциональная скорости движения поршня).
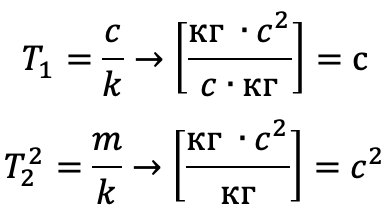
– сила вязкого трения (пропорциональная скорости движения поршня).Размерности сил и коэффициентов, входящих в уравнение (2):

Считаем, что в нулевой момент времени поршень находится в равновесии. Тогда начальное положение поршня — y0 в равновесии, где скорость и ускорения равны 0, можно посчитать из уравнения 2.
Данное уравнение позволяет посчитать, в каком положении будет поршень при различных нагрузках. Эта статическая характеристика: приложили силу — получили перемещение. Ее вид для нашей системы предельно прост (См. рис. 2):
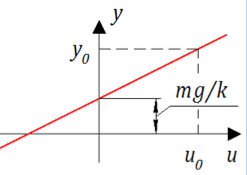
Рисунок 2. Статическая характеристика демпфера.
Казалось бы, вот оно счастье – простая линия, когда приложил силу, получил перемещение. Но не тут-то было! Нас интересует не конечное положение поршня, а процесс перехода из одного состояния в другое.
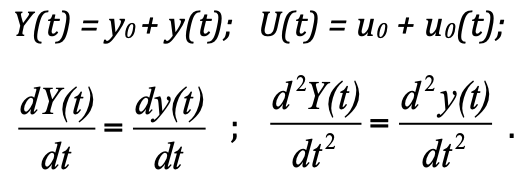
Для анализа переходного процесса и создана теория автоматического управления ТАУ. По типовой «технологии создания моделей» согласно этой теории предлагается рассматривать систему не в абсолютных значениях, а в отклонениях от равновесного состояния. Такая постановка упрощает решение и построение. И в самом деле, если заменить абсолютные значения на отклонения, то получим:
F_пр = k•(y0+y(t)) = k•y0 + k•y(t) – сила сопротивления пружины;
 — сила трения.
— сила трения. но поскольку мы приняли, что в начальный момент у нас состояние равновесия, а сумма трех сил в состоянии равновесия равна нулю, их можно убрать из уравнения, и в итоге получим:
но поскольку мы приняли, что в начальный момент у нас состояние равновесия, а сумма трех сил в состоянии равновесия равна нулю, их можно убрать из уравнения, и в итоге получим: 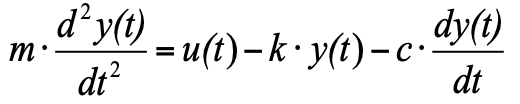 (4)
(4)Для того, что бы перевести уравнение к виду по канону ТАУ, нужно все уравнение разделить на k, чтобы коэффициент у значение выходной переменной был равен 1, и перенести в правую часть множители с выходными значения у(t), а в левую – с входными воздействиями u(t):
 (5)
(5)Это уравнение можно уже записать в операторной форме:
 (6)
(6)где:

р = d/dt – оператор дифференцирования. Обратите внимание, что размерности коэффициентов имеют размерность и смысл постоянных времени:
A передаточная функция для такого уравнения [6] имеет вид:

Сейчас на ваших глазах мы получили из уравнений физики передаточную функцию в виде блока, и, более того, полученный блок представляет собой стандартное колебательное звено из ТАУ.
Лично для меня, магией здесь является волшебное появление из статических характеристик, частей системы, массы поршня, упругости пружины, трения на стенках) объекта волшебным образом появилась временная характеристика переходных процессов в системе
Проверим формулы моделью
Как научил меня Максим Андреев, при создании динамических моделей «Конец — всему голова!» (смотри здесь второй принцип моделирования — «начинай с конца»):
А в конце функции у нас – перемещение.
Поэтому Представим уравнение 2 в форме Коши, для перемещения.
Форма Коши, это когда слева – производные интересующих нас функций, справа – выражения для их вычисления. Поскольку производная в уравнении у нас второй степени, то введя новую переменную Y1 – скорость изменения положения (скрость перемещения), мы получим систему из двух уравнений в форме Коши:
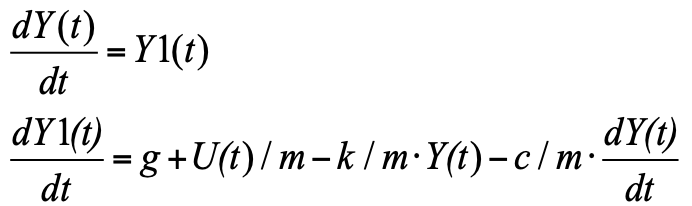
Данное уравнение можно просто записать в блок «Язык программирования» и получить модель (см. рис.3):

Рисунок 3. Модель демпфера на языке программирования.
В качестве входа используем значение силы U, выходом из блока является перемещение Y, начальное положение задается по формуле 3. Все переменные задаем как глобальные сигналы для проекта:
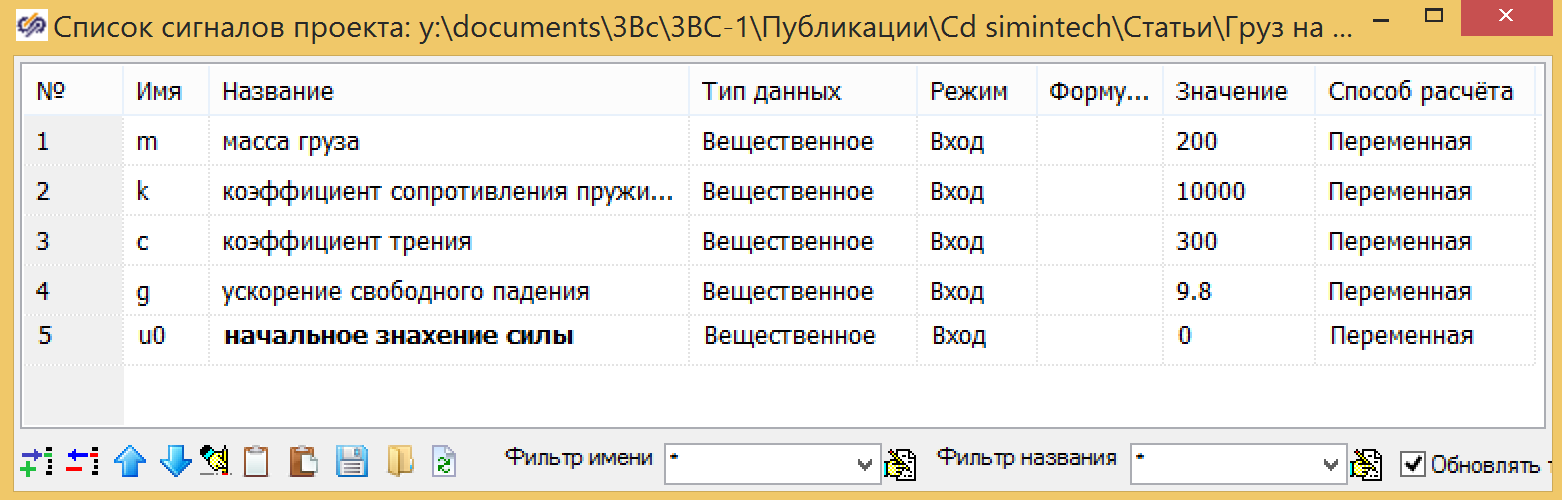
Рисунок 4. Глобальные переменные проекта.
Модель демпфера можно создать и в виде структуры, на рисунке 5, где представлена параллельная модель демпфера, созданная из стандартных блоков, в которой начальное условие находится в интеграторе у выхода (см. рис. 6), а коэффициенты внесены в сумматор (см. рис. 7)
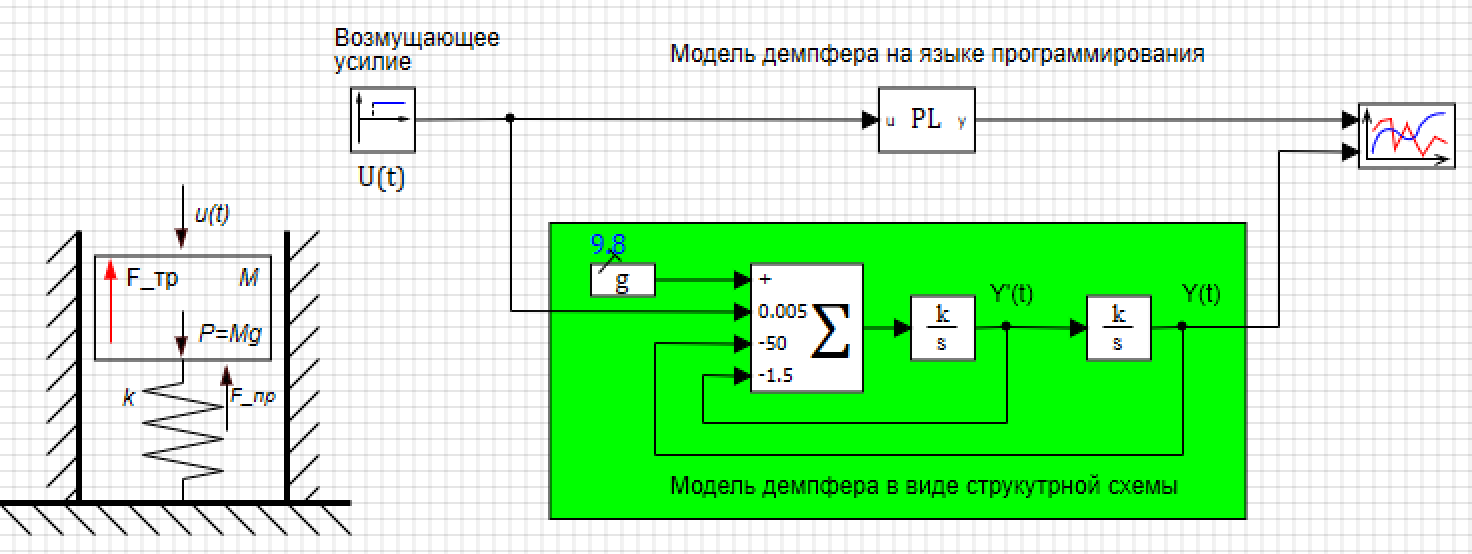
Рисунок 5. Демпфер на языке программирования и в виде структурной схемы.
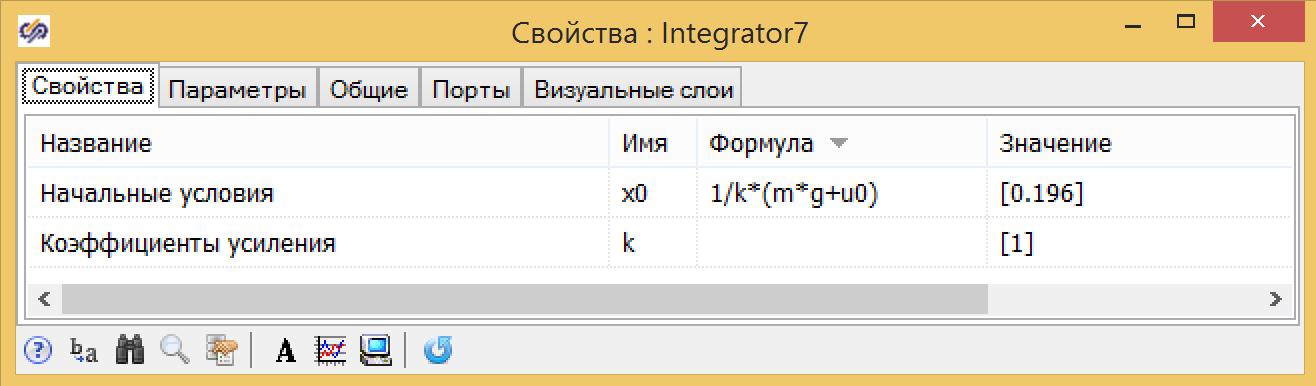
Рисунок 6. Свойство интегратора с начальными условиями.
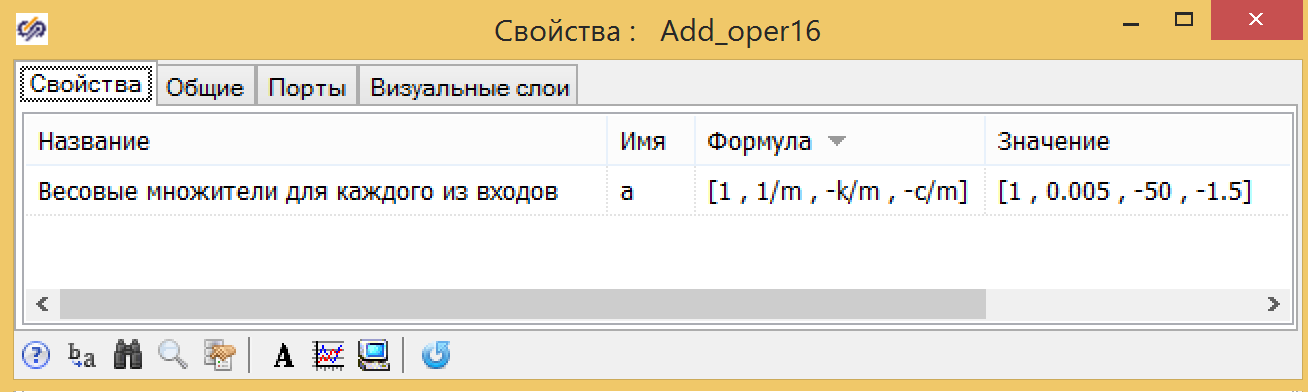
Рисунок 7. Свойства сумматора с коэффициентами.
Зададим возмущающее воздействие на 10 секунде, изменяя воздействующую силу с 0 до 30, скачком, и убедимся, что две модели показывают одинаковый результат (см. рис. 8).

Рисунок 8. Перемещение демпфера.
Проверим модель в виде передаточной функции в общем виде и в виде колебательного звена, которым данная система и является. Для этого соберем схему, как показано на рисунке 9.

Рисунок 9. Две модели демпфера в виде передаточных функций.
Нужно учесть, что схему мы составляли в отклонениях, поэтому для получения абсолютного значения необходимо добавить константу – начальное положение поршня.
Для передаточной функции (формула 7) мы используем те же самые глобальные константы и выражения, полученные ранее для k1, T1, T2 (см. рис. 10).
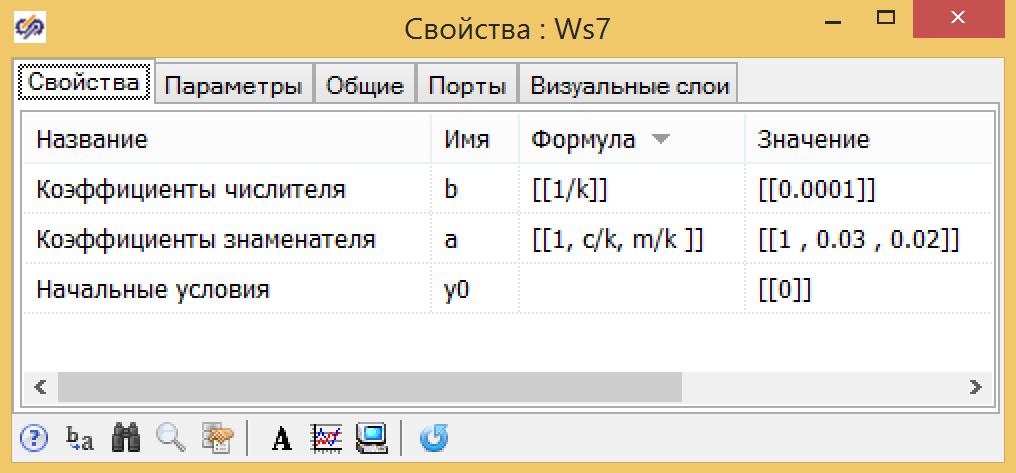
Рисунок 10. Параметры передаточной функции общего вида.
Для параметров колебательного звена формулы немного сложнее, но все также могут быть выражены через глобальные параметры: массу поршня — m, коэффициент сопротивления пружины — k, коэффициент трения — с (см. рис. 11).
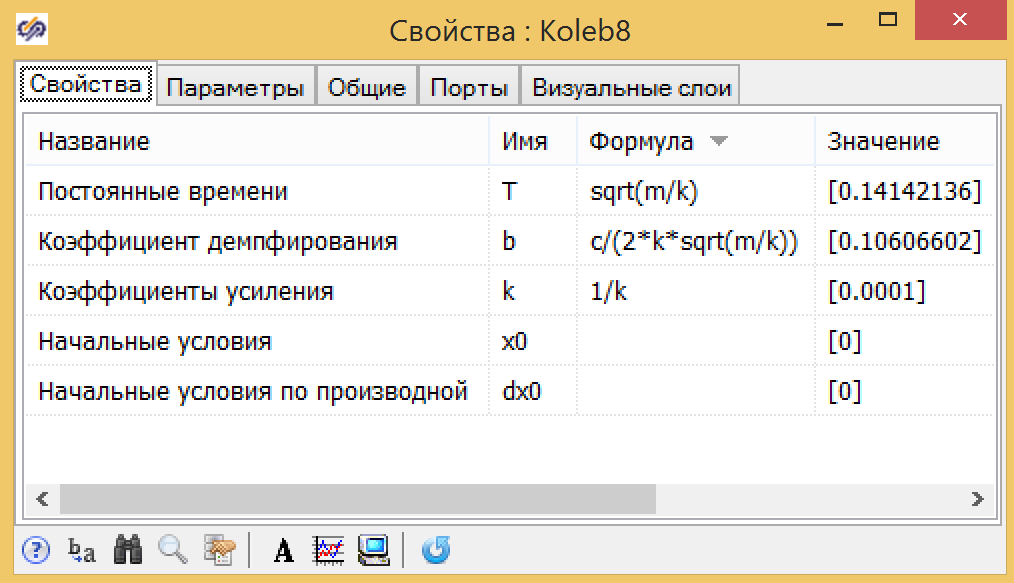
Рисунок 11. Параметры колебательного звена.
Графики переходного процесса показывают (см. рис. 12), что магия ТАУ действительно работает. Передаточная функция дает точно такие же результаты как модель, составленная на основе уравнений физики.
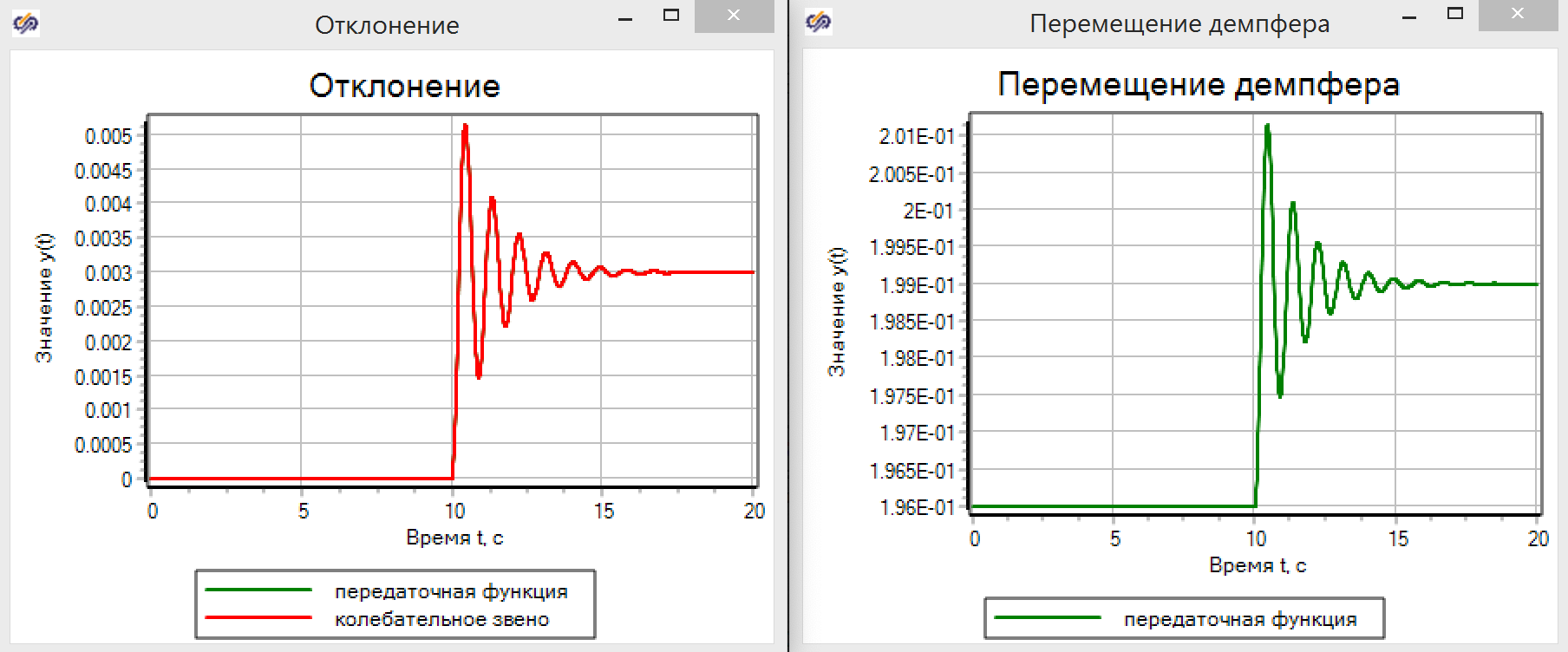
Рисунок 12. Перемещение демпфера в моделях ТАУ.
Представим, что у нас нет модели, и мы используем блок идентификации по данным, полученным из эксперимента. Есть целая технология анализа данных и получения передаточных функций, но в рамках статьи и в качестве примера мы подключим блок построения передаточных функций к модели в виде языка программирования, как показано на рисунке 13. Считаем, что у нас модель – «черный ящик», и мы не знаем, что там внутри.

Рисунок 13. Схема подключения псевдо-идентификатора.
В результате анализа нашего блока на языке программирования мы получили передаточную функцию, которая практически не отличается от исходной, выведенной из уравнений (см. рис 14.). Сравните с рисунком 10. Вот она волшебная кнопка!
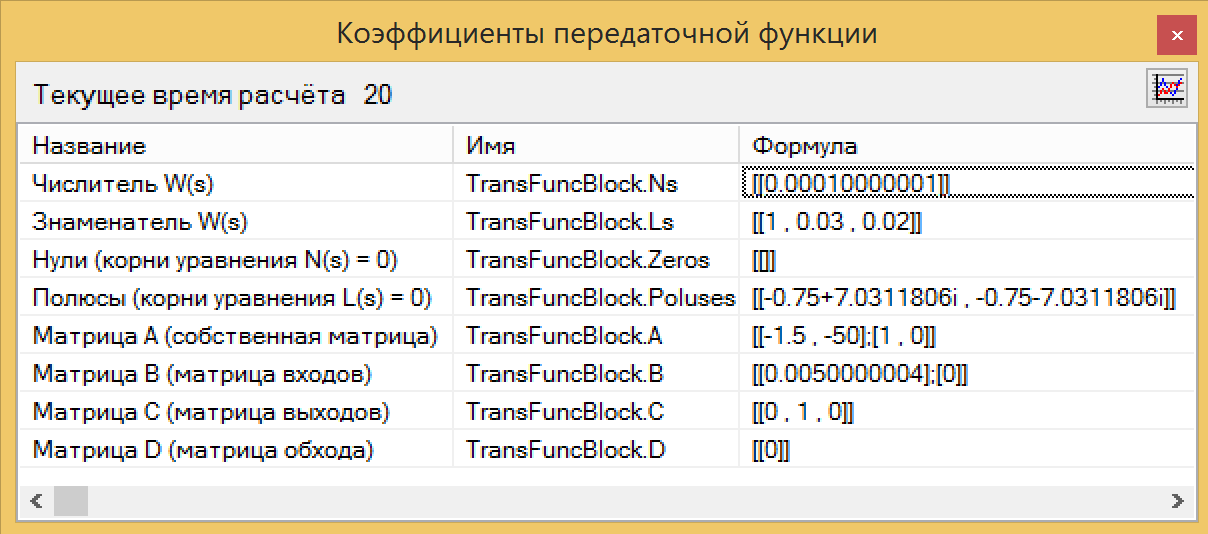
Рисунок 14. Результаты идентификации передаточной функции.
Значения числителя и знаменателя можно напрямую скопировать из блока идентификации, вставить в блок передаточной функции и убедиться, что графики совпадают. Магия ТАУ работает.
Сеанс разоблачения магии
Так почему нельзя всегда использовать System Identification для процесса модельно-ориентированного проектирования, когда все так волшебно?
Чтобы понять недостаток моделей, полученных путем идентификации «черного ящика» System Identification, попробуйте ответить на простой вопрос: какое будет отклонение демпфера при увеличении массы поршня на 30%?
Тут-то и выясняется, что не все йогурты одинаково полезны.
В случае, если у вас есть честные уравнения, вы просто меняете массу груза в глобальных переменных проекта и получаете новый переходный процесс, и новую передаточную функцию.

В случае, когда у вас вместо честных уравнений физики уже готовая передаточная функция, построенная по результатам эксперимента, вам нужно снова бежать и делать эксперимент, чтобы понять, как повлияет изменение массы на поведение модели. Как говорится, дурная голова ногам покоя не дает.
Выводы:
- Сесть и подумать над уравнениями физики – всегда полезнее и дешевле, чем экспериментировать.
- Модель, выведенная из физических уравнений процессов, гораздо вкуснее и полезнее передаточных функций.
- Эксперимент должен уточнять неизвестные коэффициенты или трудно измеряемые параметры.
- Учите физику и будет вам счастье!
Файл с моделью демпфера для эксперементов можно взять здесь...
Комментарии (20)

petuhoff Автор
30.09.2019 10:18Так он полностью соответвует передаточной функции, там отличий нет. Мы же не данные эксперимента обрабатывали (с ошибками, шумами, задержками измерения). Мы просто предствили, что не знаем внутренней начинки блока «языка программирования». Поэтому построитель переходной функции ее построил точно такой же какой она и была задана в блоке (см. рис. 14). Этот блок вместо всех математических выводов в символьной форме, сделал численный анализ модели и получил те же самые цифры в передаточной функции, который мы вводили в формулах.

Arastas
30.09.2019 12:54Что-то заголовок "System Identification is sucks" из текста не следует и несколько желтоват.
petuhoff Автор
30.09.2019 13:35Так насколько изменится отклонениеи демпфера и время переходного процнсса при увеличении массы поршня? Если у вас в качестве исходных данных только передаточная функция полученая методом идетификации?
Arastas
30.09.2019 14:39Интересно не как изменится отклонение, а то, почему вы вообще считаете этот вопрос имеющим отношение к system identification, ведь ваше недовольство результатом относится к выбору между разными подходами к моделированию систем.
Вы знакомы с классификацией black/grey/white box? Вы сами выбрали black box, задались семейством моделей с обобщёнными параметрами, а потом недовольны результатом. Так при чем тут system identification, может дело в том, как вы выбираете инструменты для своих задач? Задачей system identification было найти наилучшую модель в заданном вами классе, и эта задача успешно решена. Если же вам надо отслеживать влияние физических (а не обобщенных) параметров на систему, то зачем вы делаете black-box identification, которая в принципе на такие вопросы не отвечает? Вашим выбором должен быть white box (как в примере) или grey box, в зависимости от доступной априорной информации.
petuhoff Автор
30.09.2019 14:51Сам метод system identification предполагает черный ящик, и его нельзя использовать в модельно ориентированном проектировании. Но вот а почему нельзя, как оказалось, не всем очевидно. В дискусси под предыдущей статьей два человека сказали зачем мучатся с уравнениями если есть результаты эксперимента. Ну и с реальным производством приходилось сталкиваться, где говорят так:
-Херня вся ваша теплофизика, у нас есть эксперимент, а остальное это все фантазии.
Мне показалось, что пример наглядный, в одном случае у нас есть уравнения физики и модель, в другом случае просто модель. Оказывается просто модель как то не сильно помогает для проектирования, даже для грузила на пружинке.Arastas
30.09.2019 15:01Сам метод system identification предполагает черный ящик
Это неверно. System identification может работать как с black box, так и с grey box (и с их смешением). Просто для black box, особенно для линейных, есть много хорошо проработанных эффективных и вычислительно недорогих методов, как online, так и offline идентификации.
Выбор же между black и grey box должен осуществляються разработчиком исходя из решаемой задачи. И чтоб задача решалась, и чтоб решение не было избыточным.petuhoff Автор
30.09.2019 15:46Вобще то согласен, можено использовать и для белых ящиков, по крайней мере для ускорения рассчетов полезно.
petuhoff Автор
30.09.2019 13:27Так насколько изменится отклонениеи демпфера и время переходного процнсса при увеличении массы поршня? Если у вас в качестве исходных данных только передаточная функция полученая методом идетификации?

RouR
30.09.2019 15:47+1Сесть и подумать над уравнениями физики – всегда полезнее и дешевле, чем экспериментировать.
Ровно до того момента пока нп практике не выяснится что (для вашего примера) неизвестны ни коэф. жесткости пружины, ни масса груза, ни другие параметры, а остановить производство и померить — нельзя. А задачу по настройке ПИД-регулятора выполнить надо, пусть и не оптимально, но хотя бы на некотором достаточном уровне.
Ну это помимо того что на практике модель будет посложнее пружины с грузиком.
А еще мир не идеален и задачу требуют решить быстро.
Так что насчёт полезнее я бы поспорил. Полезнее для собственного развития — да. Полезнее для производства — нет.
emmibox
01.10.2019 05:00Какое то у вас застарелое производство… В современном мире синтез регулятора это правило 80:20 — 80% воздействия образовано априорными знаниями об объекте (прямое управление по модели объекта) 20% — «незнанием» или апостериорным подгоном под ответ (управление с обратной связью — PID).
Так вот жесткость пружины не надо мерить! с точностью 80% я назову ее вам зная диаметр прутка число витков, диаметр навивки и марку пружинной стали… Для этого иногда достаточно на пружину просто посмотреть.RouR
01.10.2019 09:56Нет, не застарелое.
правило 80:20 — это закон Паретто, его применение тут некорректно
petuhoff Автор
01.10.2019 11:11Либо наоборот современное оборудование поставленное под ключ, а что там в нутри никому не ведомо, такое тоже есть.
petuhoff Автор
30.09.2019 16:16Не могу полностью согласится, абсолютно черных коробок, в жизни как правило не бывает, всегда есть примерное описание объекта и его процессов. И вместо подбора абстрактной функции медодом идентификациии, можно построить физическую модель объекта, а ее параметры определить с эксперементальных данных, это требует не намного больших усилий, но приводит к более достоверной модели. Вот в предыдущей статье про авиационный теплообменник, как раз и приводится пример, использования данных эксперементальных данных, для доводки физической модели.
Как правило, исходные данные для физических уравнений измерить и получить более просто, чем для достоверной идентификации, а вот ссылка на пример, когда модель перестает быть идентифицируемой.
Даже в примере с демпфером, достаточно просто померять и массу и сопротивление, (сопротивления трения сложнее) но можно. А вот точно снять колебания уже проблематично.
nickname21
01.10.2019 15:12р = d/dt – оператор дифференцирования.
А почему иногда p называют оператором дифференцирования, если это по сути просто комплексная переменная, которая вылазит в пространстве изображений, после применения преобразования Лапласа?
Передаточная функция дает точно такие же результаты как модель, составленная на основе уравнений физики.
Обратное преобразование применяют для дроби и естественно получается такое же решение…
Вообще я не специалист в ТАУ, опыта мало, хотя знания вроде некоторые есть, потому для меня до сих пор загадка, чем же удобно это представление системы в виде блоков? Тем, что потом анализировать устойчивость удобно? И лишь по этому?
(ну и кроме того, что, видимо, блоки можно интерпретировать как конечные устройства что либо измеряющие, управляющие и т.д. + удобство преобразования кучи блоков в один, наверное даже автоматически)Arastas
01.10.2019 16:53А почему иногда p называют оператором дифференцирования, если это по сути просто комплексная переменная, которая вылазит в пространстве изображений, после применения преобразования Лапласа?
В курсе линейных систем управления они идут до уровня смешения в голове у студента (бывает, что и преподавателя), но вообще это две разные сущности: одна для работы с изображениями Лапласа, другая для работы с сигналами во времени.
petuhoff Автор
02.10.2019 10:07+1Наверное просто в для удобства, как толко записал уравнение в виде формулы (6) сразу можно перходить к передаточной функции, не заморачиваясь лаплассом. По крайней мере у нас в лекция сначала перобразование лапаласа, а потом уже вот это упрощение.
Arastas
02.10.2019 11:41+1Занудство: Если вы определили p как оператор дифференцирования, то у вас не предаточная функция, а интегро-дифференциалный оператор. Чтобы это было передаточной функцией, там должна быть комплексная переменная преобразования Лапласа.
Можно так однажды попасть на заундного рецензента.
petuhoff Автор
02.10.2019 10:16Блоки удобны сами по себе для отладки, сразу на линии связи можно смотреть результат, можно просто вырвать кусок задать воздействие и посмотреть на результат. Причем блоки без одтносительно пердаточная функции или внутир блока уравнения физики, разделение на блоки в любом случае ускоряет разработку, чем сложнее схема, тем проще работать с блоками. Потом отлаженный блок просто вставлять в схему. И если группа товарищей работает между ними тоже блоками взаимодействовать проще. В статье "скрещивая ежа и ужа" я ничего не понимая в авиадвигателях, взял незнакомый ранее мене реальны ПИД регулятор от АЭС, добавил трубопроводы задвижку, у создал модель управления оборотами турбореактивного двигателя. И все это в тченеии пары дней. Если бы модели были на фортране, или даже на моделики, а не в блоках. Хрен бы у меня что получилось в такие короткие сроки. А когда все модели в виде блоков — все просто.
trofimovep
Очень ждал в конце график отклонения функции System Identification.
А так статья получается примерно такой:
Понятно, что такие веще только приближенно выдают модель, в этом и состоит главная задача аппроксимации — аппроксимировать так, чтобы в неконтрольных точках было адекватное поведение. И хотелось бы посмотреть, как тут себя поведет эта штука)